人体步态参数确定方法、装置、电子设备及存储介质
- 国知局
- 2024-11-21 11:33:52
本公开涉及步态分析,尤其涉及一种人体步态参数确定方法、装置、电子设备及存储介质。
背景技术:
1、脑卒中仍然是一个巨大的全球性负担。脑卒中是全球致残的主要原因,80%以上的幸存者会出现平衡障碍,增加了他们在日常活动中跌倒的风险。恢复行走能力是脑卒中幸存者最常见的目标之一。步态是预测卒中后功能独立性和长期生存的重要指标,因此步态分析可以评估治疗效果并跟踪康复进展。虽然一些医院的步态分析设备可以非常准确地评估康复效果和进展,但在家中或社区使用这些方法评估患者的步态功能是困难的。因此,研制用于中风患者步态定量评估的可穿戴传感器具有重要意义。
2、虽然过往估算步态参数的文献有许多,且方法多变,估计多个步态参数大多为采用惯性传感器网络,可并不适用于家庭环境,而适用家庭的便携传感器较贵,且估算步态参数性能较差。
技术实现思路
1、本公开提供了一种人体步态参数确定方法、装置、电子设备及存储介质,以至少解决现有技术中存在的以上技术问题。
2、根据本公开的第一方面,提供了一种人体步态参数确定方法,所述方法包括:
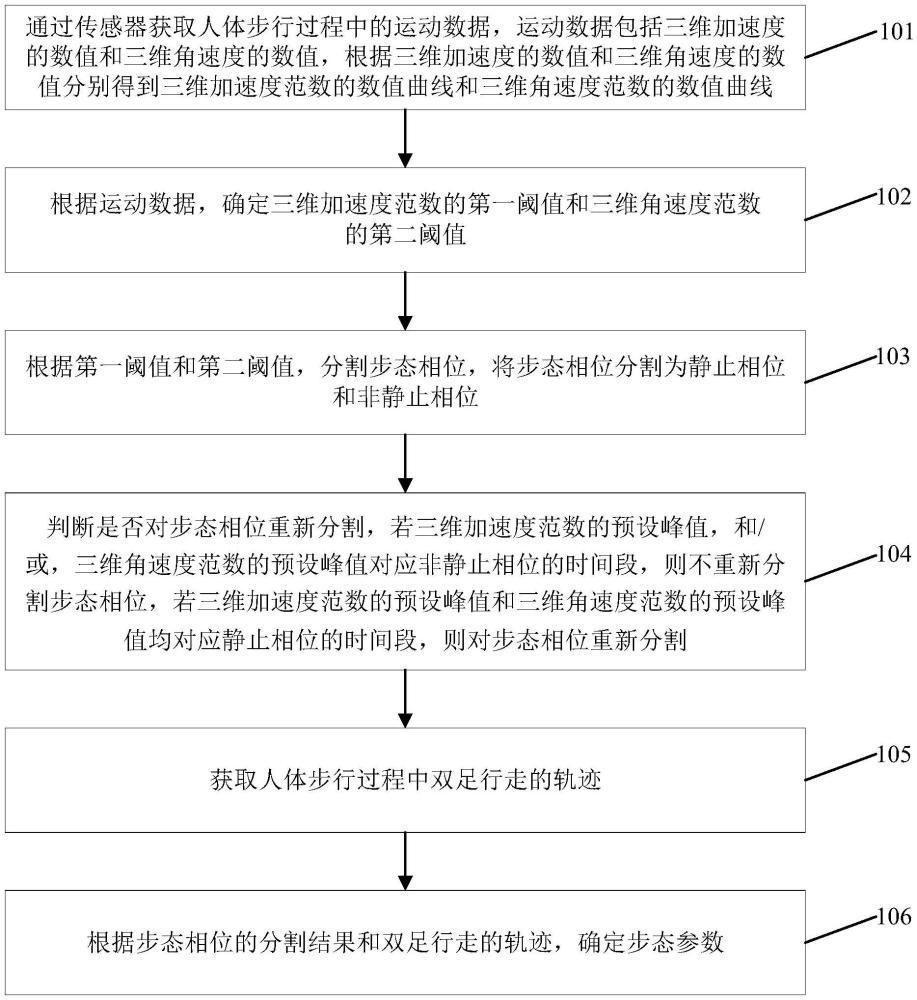
3、通过传感器获取人体步行过程中的运动数据,所述运动数据包括三维加速度的数值和三维角速度的数值,根据所述三维加速度的数值和所述三维角速度的数值分别得到三维加速度范数的数值曲线和三维角速度范数的数值曲线;
4、根据所述运动数据,确定所述三维加速度范数的第一阈值和所述三维角速度范数的第二阈值;
5、根据所述第一阈值和所述第二阈值,分割步态相位,将所述步态相位分割为静止相位和非静止相位;
6、判断是否对所述步态相位重新分割,若所述三维加速度范数的预设峰值,和/或,所述三维角速度范数的预设峰值对应非静止相位的时间段,则不重新分割所述步态相位,若所述三维加速度范数的预设峰值和所述三维角速度范数的预设峰值均对应静止相位的时间段,则对所述步态相位重新分割;
7、获取人体步行过程中双足行走的轨迹;
8、根据所述步态相位的分割结果和所述双足行走的轨迹,确定所述步态参数。
9、在一可实施方式中,所述根据所述运动数据,确定所述三维加速度范数的第一阈值和所述三维角速度范数的第二阈值,包括:
10、分别根据下列公式(1)和公式(2)计算所述三维加速度的范数和所述三维角速度的范数:
11、
12、其中,tk表示数值曲线中的第k个时间点,为三维加速度的范数,为三维加速度,为三维角速度的范数,为三维角速度;
13、根据下列公式(3)计算所述第一阈值和所述第二阈值:
14、
15、其中,表示第一阈值或第二阈值,当i=a时,表示第一阈值,当i=w时,表示第二阈值;wi表示权重,范围在0到1之间,其中,当i=a时,wi对应三维加速度的权重,当i=w时,wi对应三维角速度的权重;t-表示小于第一阈值的三维加速度的数量的总和,或小于第二阈值的三维角速度的数量的总和,t+表示大于第一阈值的三维加速度数量的总和,或大于第二阈值的三维角速度的数量的总和。
16、在一可实施方式中,所述根据所述第一阈值和所述第二阈值,分割步态相位,将所述步态相位分割为静止相位和非静止相位,包括:
17、根据所述第一阈值分割所述三维加速度范数的数值曲线,得到多个时间段;
18、根据所述第二阈值分割所述三维角速度范数的数值曲线,得到多个时间段;其中,在同一时间段内,当所述三维加速度的范数小于所述第一阈值,并且所述三维角速度的范数小于所述第二阈值时,则确定所述步态相位处于静止相位,当所述三维加速度的范数大于所述第一阈值,和/或,当所述三维角速度的范数大于所述第二阈值时,则确定所述步态相位处于非静止相位。
19、在一可实施方式中,在判断是否对所述步态相位重新分割之前,所述方法还包括:
20、判断所述三维加速度范数的数值曲线中的峰值和所述三维角速度范数的数值曲线中的峰值是否为预设峰值,若同一时间段内,所述三维加速度范数的峰值的宽度与所述三维角速度范数的峰值的宽度之和大于第三阈值,则所述三维加速度范数的峰值为三维加速度范数的预设峰值,所述三维角速度的范数的峰值为三维角速度范数的预设峰值,其中,所述峰值的宽度为峰的上升时间和下降时间的和。
21、在一可实施方式中,所述第三阈值大于等于30ms且小于等于110ms。
22、在一可实施方式中,所述运动数据位于载体坐标系内,所述载体坐标系为传感器本身的坐标系;
23、所述获取人体步行过程中双足行走的轨迹,包括:
24、以人体行走的前进方向为x轴方向,以人体右侧为y轴方向,以垂直于xy平面向下为z轴方向,形成参考坐标系;
25、根据x轴方向的向量、y轴方向的向量和z轴方向的向量,确定旋转矩阵;
26、根据所述旋转矩阵,确定初始航向角;
27、根据所述初始航向角,将载体坐标系转换为参考坐标系;
28、重复上述步骤,经过至少一次迭代,确定所述双足行走的轨迹。
29、在一可实施方式中,根据所述步态相位的分割结果和所述双足行走的轨迹,确定所述步态参数,包括:
30、所述步态参数包括步幅、步长、步速和步频,所述步幅表示一侧脚跟着地到该侧脚跟再次着地之间的距离,所述步长表示行走过程中前方脚跟和后方脚跟之间的距离,所述步速表示步幅和步行周期的比值,所述步频表示每分钟行走的步数;
31、其中,根据下列公式(4)~公式(7)分别得到步幅、步长、步速和步频:
32、
33、其中,slm表示步幅,m表示步数,x和y分别表示脚跟在x轴方向和y轴方向的坐标值;
34、
35、其中,表示步长,当i表示右脚时,i′表示左脚,当i表示左脚时,i′表示右脚;
36、
37、其中,svm表示步速,tstride,m表示步行周期,步行周期表示一侧脚跟着地到该侧脚跟再次着地之间的时间;
38、
39、其中,cm表示步频。
40、根据本公开的第二方面,提供了一种人体步态参数确定装置,所述装置包括:
41、第一获取单元,用于通过传感器获取人体步行过程中的运动数据,所述运动数据包括三维加速度的数值和三维角速度的数值,根据所述三维加速度的数值和所述三维角速度的数值分别得到三维加速度范数的数值曲线和三维角速度范数的数值曲线;
42、第一确定单元,用于根据所述运动数据,确定所述三维加速度范数的第一阈值和所述三维角速度范数的第二阈值;
43、分割单元,用于根据所述第一阈值和所述第二阈值,分割步态相位,将所述步态相位分割为静止相位和非静止相位;
44、判断单元,用于判断是否对所述步态相位重新分割,若所述三维加速度范数的预设峰值,和/或,所述三维角速度范数的预设峰值对应非静止相位的时间段,则不重新分割所述步态相位,若所述三维加速度范数的预设峰值和所述三维角速度范数的预设峰值均对应静止相位的时间段,则对所述步态相位重新分割;
45、第二获取单元,用于获取人体步行过程中双足行走的轨迹;
46、第二确定单元,用于根据所述步态相位的分割结果和所述双足行走的轨迹,确定所述步态参数。
47、根据本公开的第三方面,提供了一种电子设备,包括:
48、至少一个处理器;以及
49、与所述至少一个处理器通信连接的存储器;其中,
50、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本公开所述的方法。
51、根据本公开的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行本公开所述的方法。
52、本公开的人体步态参数确定方法、装置、电子设备及存储介质,先得到第一阈值和第二阈值,然后根据第一阈值和第二阈值,对步态相位进行初步分割,再根据三维加速度范数的预设峰值和所述三维角速度范数的预设峰值与非静止相位的时间段的对应关系,重新分割步态相位,最后根据步态相位分割结果和双足行走的轨迹来得到步态参数,本方案提高了步态相位分割的精度,能够较为准确的估算出人体运动的步态参数,为可穿戴设备应用于家庭和社区中的患者进行步态分析提供了一项有效的方法。
53、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
本文地址:https://www.jishuxx.com/zhuanli/20241120/331797.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。