双足机器人的平地步态优化方法及系统
- 国知局
- 2024-07-31 23:29:25
本发明涉及机器人控制,具体为双足机器人的平地步态优化方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、双足机器人,是指模仿人类双足行走方式的机器人,由于其运动方式与人体类似,相较于轮式机器人和履带式机器人,其地形适应性更高、能源消耗更低。
3、机器人身体、环境和控制系统的耦合产生了双足机器人的步态,中枢模式发生器(central pattern generator, cpg)因其具有抗扰动、阶跃平滑、参数结构清晰等优点,被广泛应用于双足步态控制领域。cpg网络是由多个cpg单元相互耦合建立的网络结构,主要包括全连接cpg网络、环形cpg网络和起搏器cpg网络,cpg网络具有可参数化的特性,这项特性允许基于cpg网络的步态控制器可以结合任何优化算法以获得适合的步态参数,实现优异的步态效果。
4、面向具体行走任务时可以构建具体的优化目标,借助cpg网络可参数化的特性,可以将双足步态任务建模为一个高维优化任务,由于双足机器人具有高自由度的特性,导致即使基于特定的适应度函数和不同的cpg网络参数组合也可以完成步态任务,这是一个典型的具有多个局部最优的高维优化任务,而gbest-pso算法,即基于gbest结构的粒子群优化(particle swarm optimization,pso)算法由于其gbest拓扑结构容易陷入局部最优,导致基于cpg网络的双足步态任务难以实现理想的步态。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供双足机器人的平地步态优化方法及系统,将平衡粒子群算法应用在双足机器人的步态优化过程,以更小的种群规模获得了更高的求解精度。
2、为了实现上述目的,本发明采用如下技术方案:
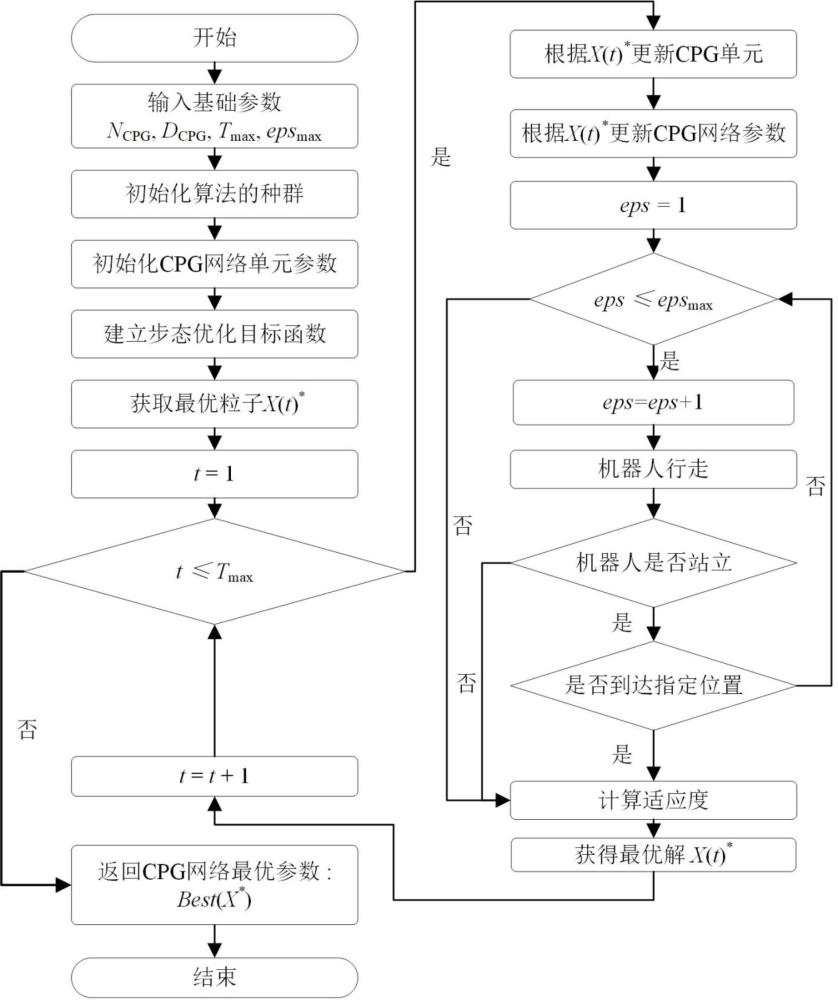
3、本发明的第一个方面提供双足机器人的平地步态优化方法,包括以下步骤:
4、设计cpg网络结构,基于kimura cpg单元模型搭建起搏器式cpg网络,基于该cpg网络建立双足步态控制器结构,参考人类步态确定cpg单元连接形式,根据kimura cpg单元模型确定待优化参数集;
5、以机器人初始站立位置中心在地面的投影点为原点,构建世界坐标系,基于构建的坐标系,利用机器人zmp稳定性指标,机器人保持站立的总时间,机器人到达的目标距离,机器人行走速度,构建相应的目标函数,所有的目标函数经归一化和加权处理;
6、建立种群探索和利用的平衡策略,具体的,该平衡策略包括自由探索策略和注意力探索阶段,利用该策略克服gbest-pso算法易陷入局部最优的缺陷,提升算法优化效果;
7、基于优化算法,以加权处理后的目标函数为优化目标,进行设定迭代次数的优化,每一次迭代中均模拟一次机器人行走任务,直至获得最优粒子对应的机器人控制参数。
8、进一步的,利用机器人zmp稳定性指标构建目标函数,如下式所示:
9、;
10、;
11、式中,zmpx表示零力矩点在支撑脚坐标系 σs中的横坐标,是机器人在 k时刻时零力矩点的x方向的变化量,定义为,, k是机器人保持站立的总时间,zmpy表示零力矩点在支撑脚坐标系 σs中的纵坐标,是机器人在 k时刻时零力矩点的y方向的变化量,定义为。
12、进一步的,利用机器人保持站立的总时间,构建目标函数,满足双足机器人行走过程中不摔倒,并鼓励机器人尽可能延长不摔倒的时间,如下式所示:
13、;
14、式中,是机器人完成行走目标的最大时间,其中, k是机器人保持站立的总时间。
15、进一步的,利用机器人到达的目标距离,构建目标函数,避免机器人原地站立并鼓励机器人到达目标距离,如下式所示:
16、;
17、式中, xend是机器人摔倒时机器人在世界坐标系 σw中x方向的行走距离, xg是机器人到达的目标距离。
18、进一步的,利用机器人行走速度构建目标函数,如下式所示:
19、;
20、式中, k是总时间,是第 k步时机器人在行进方向,即x方向的位移量。
21、进一步的,归一化和加权处理后的目标函数,如下式所示:
22、;
23、式中,和是归一化后的零力矩点坐标值,是归一化后的机器人存活时间,是归一化后的机器人在世界坐标系中x方向的前进距离,是归一化后的机器人质心变化量,是归一化后的机器人在世界坐标系中x方向的平均速度,是权重,。
24、进一步的,优化算法的核心是种群的探索和利用的平衡策略,包括探索阶段和开发阶段,利用权重 r平衡每个阶段的探索和开发,如下式所示:
25、;
26、;
27、式中,是权重振幅,根据优化目标确定, r1和 r2是随机数标量。
28、进一步的,优化算法迭代优化过程中,粒子位置的更新模型,如下式所示:
29、;
30、式中, r是权重, tp是注意力探索阶段的迭代次数,,和分别是迭代次数为 t时的种群位置矩阵和最优粒子向量, n是种群中的粒子数量, d是粒子的维度。
31、本发明的第二个方面提供双足机器人的平地步态优化系统,包括:
32、优化参数模块,被配置为:基于cpg网络确定待优化参数集,以机器人初始站立位置中心在地面的投影点为原点构建世界坐标系;
33、目标函数模块,被配置为:基于构建的坐标系,利用机器人稳定性指标,机器人保持站立的总时间,机器人到达的目标距离以及机器人行走速度,构建相应的目标函数,所有的目标函数经归一化和加权处理;
34、多目标优化模块,被配置为:建立优化算法的种群探索和利用的平衡策略,平衡策略包括自由探索策略和注意力探索阶段,基于优化算法,以加权处理后的目标函数为优化目标,进行设定迭代次数的优化,每一次迭代中均模拟一次机器人行走任务,直至获得优化算法中,最优粒子对应的机器人控制参数。
35、本发明的第三个方面提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述配双足机器人的平地步态优化方法中的步骤。
36、本发明的第四个方面提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行程序时实现上述双足机器人的平地步态优化方法中的步骤。
37、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
38、1、利用各目标函数,考虑了零力矩点稳定性、机器人不跌倒、避免机器人原地站立、鼓励机器人前进和鼓励机器人快速行走五个方面,建立加权的优化目标数学模型,能够更全面的优化双足机器人的步态控制过程,并且以双足机器人步行过程中,一条腿与地面接触,另一条腿摆动的状态为重点。
39、2、优化算法在每一次迭代中均模拟一次机器人的行走任务,当使用 n个bpso算法求解复杂度为的 d维问题时,初始化过程的计算复杂度为,探索阶段的计算复杂度为,开发阶段的计算复杂度为,其中 tp为开发阶段的迭代次数,bpso算法的时间复杂度为。由此可以看出,相较于标准粒子群算法,并未引入多余的计算量,在时间成本方面更有优势,从而以更小的种群规模获得了更高的求解精度。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197772.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。