一种双足海藻修剪机器人的液压换向阀控制结构
- 国知局
- 2024-07-30 14:57:05
本技术涉及液压换向阀控制,尤其涉及一种双足海藻修剪机器人的液压换向阀控制结构。
背景技术:
1、经检索现有公告号为cn217683369u的中国专利文献,公开了连接器及手动液压换向阀阀芯位置的精准控制结构,包括推拉杆与基座,其中,所述推拉杆用于与手动液压换向阀连接,所述基座用于与推杆电机的推杆连接;所述基座具有中空腔体,所述推拉杆的一部分可移动的设置于所述中空腔体内且该部分设置有第一凸起,所述第一凸起两侧的所述基座上分别设置有第一限位结构与第二限位结构,其装置通过设计巧妙,结构新颖,可以很好地实现手动液压换向阀的电控制并可以在误差范围内实现阀芯的精确定位,具有十分显著的推广意义。
2、双足海藻修剪机器人主要功能就是通过清除长期存在于船体表面上的浮游生物和植物,从而对船身的水下部分进行整体养护,传统的海藻修剪机器人比例液压换向阀和电磁阀通常成本较高,这增加了水下机器人的制造成本,且通常复杂且需要精密的电子控制系统和液压部件,增加了设计的复杂性和维护难度,特别是在手动液压换向阀的应用中,效率和响应速度可能不足以满足高性能水下机器人的要求,在恶劣的水下环境中,传统的液压系统可能受到腐蚀、堵塞和其他损害的影响,影响其可靠性和寿命,现提供一种双足海藻修剪机器人的液压换向阀控制结构。
技术实现思路
1、本实用新型要解决的技术问题是克服现有技术的缺陷,提供一种双足海藻修剪机器人的液压换向阀控制结构,旨在解决传统的海藻修剪机器人比例液压换向阀和电磁阀通常成本较高、复杂度较高、效率和响应速度有限和对环境的适应性不佳的技术问题。
2、为了解决上述技术问题,本实用新型提供了如下的技术方案:
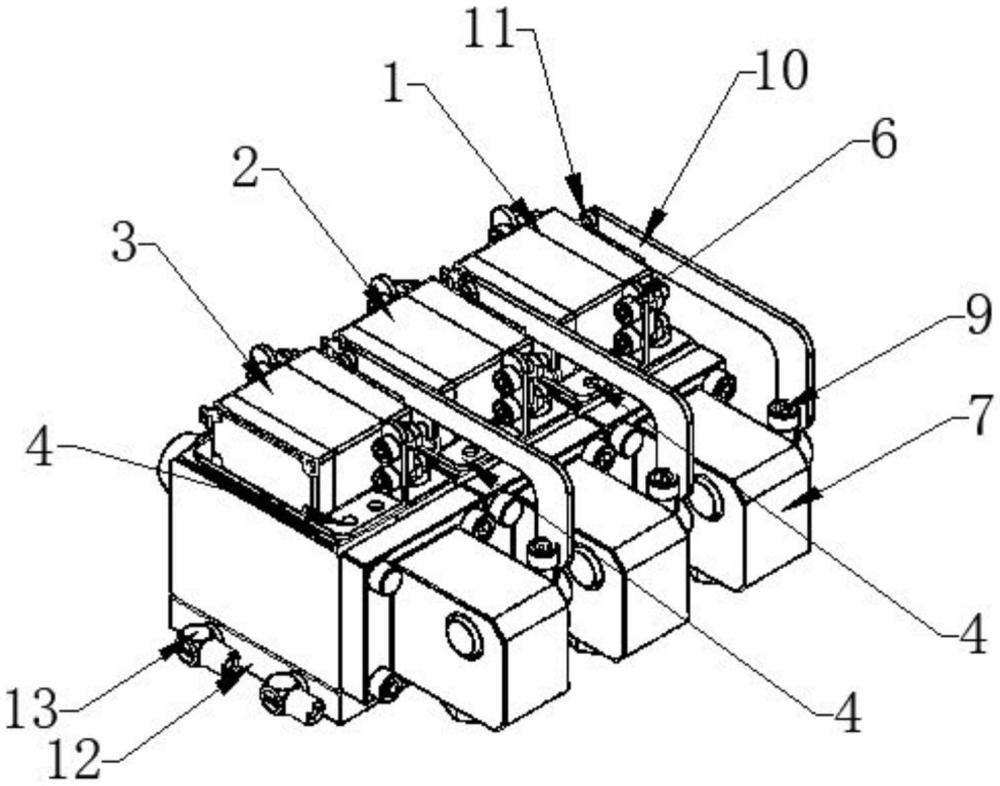
3、本实用新型一种双足海藻修剪机器人的液压换向阀控制结构,包括换向阀舵机组件,所述换向阀舵机组件包括第一换向阀舵机、第二换向阀舵机和第三换向阀舵机,所述第一换向阀舵机、第二换向阀舵机和第三换向阀舵机底端表面均设置有舵机支架,所述舵机支架一侧表面两端部内侧均设置有固定螺栓,所述固定螺栓端部外侧设置有固定螺母,所述舵机支架底端表面设置有手动换向阀,所述手动换向阀内侧设置有换向阀转轴,所述手动换向阀一侧表面端部内侧设置有连杆螺栓,所述手动换向阀顶端表面一侧设置有舵机连杆,所述舵机连杆一端表面设置有舵机摇臂,所述手动换向阀底端表面设置有油路块,所述油路块两端表面均设置有出油口接头。
4、作为上述技术方案的进一步描述:
5、所述第一换向阀舵机、第二换向阀舵机和第三换向阀舵机为横向排列设置,其第一换向阀舵机、第二换向阀舵机和第三换向阀舵机均为pwm防水舵机设置。
6、作为上述技术方案的进一步描述:
7、所述第一换向阀舵机、第二换向阀舵机和第三换向阀舵机与舵机支架均通过固定螺丝和固定螺母连接固定,其舵机支架、固定螺丝和固定螺母均为三组设置。
8、作为上述技术方案的进一步描述:
9、所述三组舵机支架底端表面均固定连接有手动换向阀,其手动换向阀为三组设置,分别位于第一换向阀舵机、第二换向阀舵机和第三换向阀舵机底端。
10、作为上述技术方案的进一步描述:
11、所述手动换向阀内侧活动连接有换向阀转轴,所述手动换向阀与舵机连杆通过连杆螺栓连接固定,所述第一换向阀舵机、第二换向阀舵机和第三换向阀舵机与舵机连杆配合固定螺栓,使舵机摇臂连接至舵机连杆端部内侧。
12、作为上述技术方案的进一步描述:
13、所述手动换向阀底端表面固定连接有油路块,所述油路块两端固定连接有出油口接头,其出油口接头两个为一组,固定排列至油路块两端。
14、本实用新型具有如下有益效果:
15、本实用新型中,通过创新设计大幅降低了整体成本,使得液压控制系统更经济实惠,通过结合pwm防水舵机和手动换向阀,简化了系统的设计和维护,使新型换向阀提高了液压流量的控制精度,从而增强了响应速度和操作效率,更适合于恶劣的水下环境,提高了系统的可靠性和耐用性。
技术特征:1.一种双足海藻修剪机器人的液压换向阀控制结构,包括换向阀舵机组件,其特征在于,所述换向阀舵机组件包括第一换向阀舵机(1)、第二换向阀舵机(2)和第三换向阀舵机(3),所述第一换向阀舵机(1)、第二换向阀舵机(2)和第三换向阀舵机(3)底端表面均设置有舵机支架(4),所述舵机支架(4)一侧表面两端部内侧均设置有固定螺栓(5),所述固定螺栓(5)端部外侧设置有固定螺母(6),所述舵机支架(4)底端表面设置有手动换向阀(7),所述手动换向阀(7)内侧设置有换向阀转轴(8),所述手动换向阀(7)一侧表面端部内侧设置有连杆螺栓(9),所述手动换向阀(7)顶端表面一侧设置有舵机连杆(10),所述舵机连杆(10)一端表面设置有舵机摇臂(11),所述手动换向阀(7)底端表面设置有油路块(12),所述油路块(12)两端表面均设置有出油口接头(13)。
2.根据权利要求1所述的一种双足海藻修剪机器人的液压换向阀控制结构,其特征在于,所述第一换向阀舵机(1)、第二换向阀舵机(2)和第三换向阀舵机(3)为横向排列设置,其第一换向阀舵机(1)、第二换向阀舵机(2)和第三换向阀舵机(3)均为pwm防水舵机设置。
3.根据权利要求1所述的一种双足海藻修剪机器人的液压换向阀控制结构,其特征在于,所述第一换向阀舵机(1)、第二换向阀舵机(2)和第三换向阀舵机(3)与舵机支架(4)均通过固定螺丝和固定螺母(6)连接固定,其舵机支架(4)、固定螺丝和固定螺母(6)均为三组设置。
4.根据权利要求1所述的一种双足海藻修剪机器人的液压换向阀控制结构,其特征在于,所述三组舵机支架(4)底端表面均固定连接有手动换向阀(7),其手动换向阀(7)为三组设置,分别位于第一换向阀舵机(1)、第二换向阀舵机(2)和第三换向阀舵机(3)底端。
5.根据权利要求1所述的一种双足海藻修剪机器人的液压换向阀控制结构,其特征在于,所述手动换向阀(7)内侧活动连接有换向阀转轴(8),所述手动换向阀(7)与舵机连杆(10)通过连杆螺栓(9)连接固定,所述第一换向阀舵机(1)、第二换向阀舵机(2)和第三换向阀舵机(3)与舵机连杆(10)配合固定螺栓(5),使舵机摇臂(11)连接至舵机连杆(10)端部内侧。
6.根据权利要求1所述的一种双足海藻修剪机器人的液压换向阀控制结构,其特征在于,所述手动换向阀(7)底端表面固定连接有油路块(12),所述油路块(12)两端固定连接有出油口接头(13),其出油口接头(13)两个为一组,固定排列至油路块(12)两端。
技术总结本技术涉及液压换向阀控制技术领域,特别涉及一种双足海藻修剪机器人的液压换向阀控制结构,包括换向阀舵机组件,第一换向阀舵机、第二换向阀舵机和第三换向阀舵机底端表面均设置有舵机支架,舵机支架底端表面设置有手动换向阀,手动换向阀内侧设置有换向阀转轴,手动换向阀顶端表面一侧设置有舵机连杆,舵机连杆一端表面设置有舵机摇臂,手动换向阀底端表面设置有油路块,通过创新设计大幅降低了整体成本,使得液压控制系统更经济实惠,通过结合PWM防水舵机和手动换向阀,简化了系统的设计和维护,使新型换向阀提高了液压流量的控制精度,从而增强了响应速度和操作效率,更适合于恶劣的水下环境,提高了系统的可靠性和耐用性。技术研发人员:王晨,王玲,岳涵受保护的技术使用者:辽宁科技大学技术研发日:20231213技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240729/169003.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。