一种基于多维人工势场算法的无人蜂群编队控制方法
- 国知局
- 2024-08-01 00:16:56
本发明属于无人机编队控制领域,特别涉及一种无人机编队控制技术。
背景技术:
1、随着微型通信设备和微型处理器的发展,无人机在智慧农业、地质勘探等领域越来越受到广泛关注。通过在空中自主构建网络,由多个小型无人机构成的无人蜂群能够协同完成各种任务,无人机间也可以通过无线链路进行单跳或多跳通信,由此进行信息传递与共享。
2、但是无人机自身特性的限制以及飞行环境的复杂性也为无人蜂群的编队控制带来了挑战。无人机的能量容量小,难以长时间飞行进行协同作业;无人机飞行速度较快,部分无人机可能脱离无人蜂群,导致无人蜂群难以协同作业,也可能导致无线网络拓扑发生变化,难以确保无线拓扑的相对稳定;无人蜂群飞行环境复杂多变,可能存在多个干扰,使得无人机间的相互通信可能会有较高延迟乃至错误。
3、为了应对上述挑战,实现无人蜂群的编队控制,许多研究基于人工势场算法使无人蜂群能够集群飞行。文献(参考文献:li h, liu w, yang c, et al. an optimization-based path planning approach for autonomous vehicles using the dynefwa-artificial potential field[j]. ieee transactions on intelligent vehicles,2021, 7(2): 263-272. )提出了一种基于动态增强烟花算法的人工势场算法,改善了路径的平滑性。文献(参考文献:pan z, zhang c, **a y, et al. an improved artificialpotential field method for path planning and formation control of the multi-uav systems[j]. ieee transactions on circuits and systems ii: express briefs,2021, 69(3): 1129-1133. )通过引入旋转势场,使人工势场算法不会出现合力过小接近于0的情况。
4、但是目前大多研究主要考虑解决人工势场算法中的合力过小接近于0的问题以及路径平滑性等飞行控制方面问题,还没有在无人蜂群编队控制中考虑通信方面的因素对业务性能和网络拓扑连通性的影响的相关研究,而将通信方面因素与无人蜂群编队控制结合,能够提高业务性能,并维持网络拓扑的连通性,因此有待深入研究。
技术实现思路
1、本发明提出一种基于多维人工势场算法的无人蜂群编队控制方法,通过多维人工势场算法,输出下一时刻的加速度,从而控制无人机飞行,进而使多个无人机形成无人蜂群进行编队控制。解决现有技术缺少在无人蜂群编队控制中考虑通信方面的因素对业务性能和网络拓扑连通性的影响的相关研究的问题。
2、本发明采用的技术方案为:一种基于多维人工势场算法的无人蜂群编队控制方法,包括:
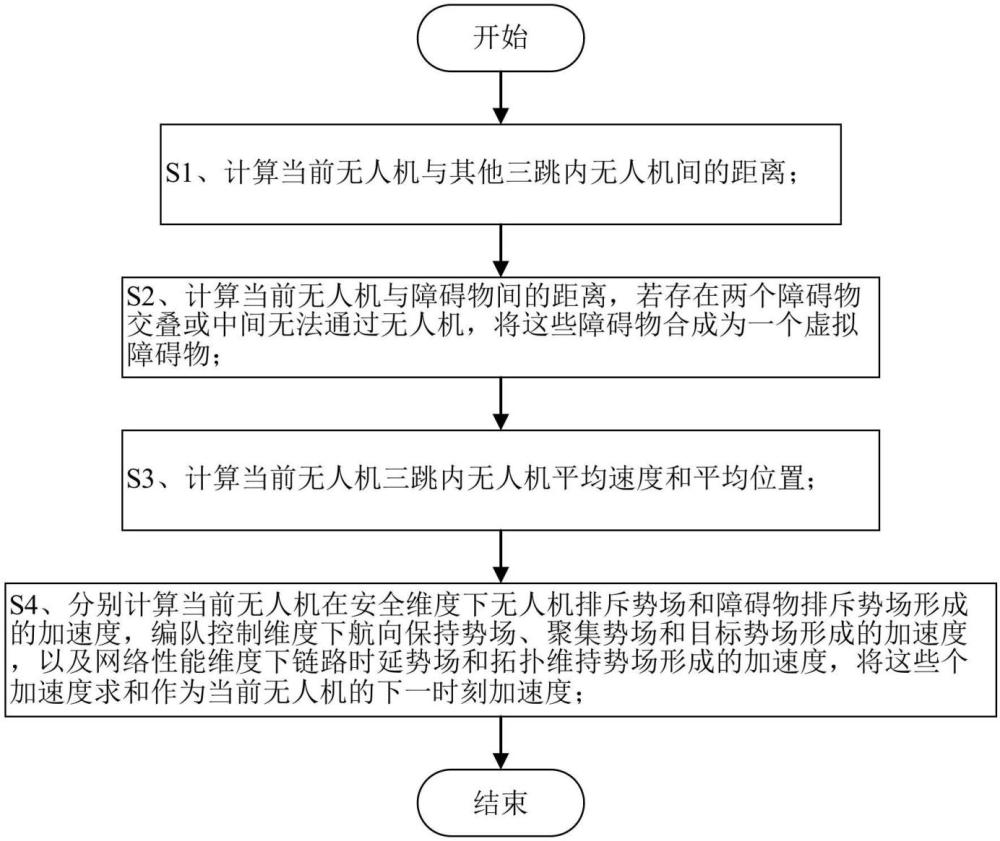
3、s1、计算当前无人机与其他三跳内无人机间的距离;
4、s2、计算当前无人机与障碍物间的距离,若存在两个障碍物交叠或中间无法通过无人机,将这些障碍物合成为一个虚拟障碍物;
5、s3、计算当前无人机三跳内无人机平均速度和平均位置;
6、s4、基于步骤s1、s2、s3各自步骤的处理结果,分别计算当前无人机在安全维度下无人机排斥势场和障碍物排斥势场形成的加速度,编队控制维度下航向保持势场、聚集势场和目标势场形成的加速度,以及网络性能维度下链路时延势场和拓扑维持势场形成的加速度,将这些个加速度求和作为当前无人机的下一时刻加速度;从而控制无人机飞行,进而使多个无人机形成无人蜂群进行编队控制。
7、本发明的有益效果:本发明的基于多维人工势场算法的无人蜂群编队控制方法将人工势场算法分为了三个维度,分别为安全维度、编队控制维度以及网络性能维度。本发明在安全维度中引入了无人机排斥势场和障碍物排斥势场从而避免碰撞,通过设置了虚拟障碍物使障碍物排斥势场能够引导无人机远离人工势场形成的合力接近0的位置,解决人工势场中合力过小的问题;在编队控制维度中引入了航向保持势场、聚集势场和目标势场使各个无人机能与其他无人机一起构成无人蜂群共同向目的地飞行;本发明考虑了通信方面的因素,在网络性能维度中引入了链路时延势场和拓扑维持势场以提升在无人机自组网中传输的业务性能,并使无人蜂群保持相对稳定的拓扑结构,链路时延势场引导无人机向减小业务时延的方向飞行,提升了业务时延性能;拓扑维持势场引导无人机向维持网络拓扑连通性的方向飞行。通过链路时延势场,保证业务传输时延,满足业务传输需求,并通过拓扑维持势场,基于通信群首无人机维持了相对稳定的通信拓扑。
技术特征:1.一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,应用场景为:多个无人机形成无人蜂群,各无人机需要从各自初始位置向各自目标位置飞行;应用场景中存在多个障碍物;无人机间相互通信,组成无人机自组网;飞行过程中,存在多个业务;
2.根据权利要求1所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,
3.根据权利要求2所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,
4.根据权利要求3所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,步骤s4中当前无人机在无人机排斥势场形成的加速度,计算过程为:
5.根据权利要求3所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,步骤s4中当前无人机在障碍物排斥势场形成的加速度,计算过程为:
6.根据权利要求3所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,步骤s4中当前无人机在航向保持势场形成的加速度,计算过程为:
7.根据权利要求3所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,步骤s4中当前无人机在聚集势场形成的加速度,计算过程为:
8.根据权利要求3所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,步骤s4中当前无人机在目标势场形成的加速度,计算过程为:
9.根据权利要求3所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,步骤s4中当前无人机在链路时延势场形成的加速度,计算过程为:
10.根据权利要求3所述一种基于多维人工势场算法的无人蜂群编队控制方法,其特征在于,步骤s4中当前无人机在拓扑维持势场形成的加速度,计算过程为:
技术总结本发明公开了一种基于多维人工势场算法的无人蜂群编队控制方法,属于无人机编队控制技术领域。所述方法包括计算当前无人机与其他三跳内邻居无人机间的距离;计算当前无人机与障碍物间的距离;计算当前无人机三跳内的无人机平均速度和平均位置;计算当前无人机在安全维度下的无人机排斥势场、障碍物排斥势场的加速度,编队控制维度下的航向保持势场、聚集势场和目标势场的加速度,网络性能维度下的链路时延势场和拓扑维持势场的加速度,加速度求和作为下一时刻加速度,使多个无人机形成无人蜂群进行编队控制。本发明考虑了通信方面的因素,通过链路时延势场,保证业务传输时延,满足业务传输需求,并通过拓扑维持势场,维持了相对稳定的通信拓扑。技术研发人员:冷甦鹏,张达培,熊凯,刘强受保护的技术使用者:电子科技大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200426.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表