一种人形下肢康复机器人的制作方法
- 国知局
- 2024-07-12 10:20:26
本发明涉及医疗康复机器人,具体涉及一种人形下肢康复机器人。
背景技术:
1、目前肢体因为一些疾病而导致行动力退化的患者在治疗过程中需要进行康复训练,对于较为严重的患者,其本身行动力有限,无法依靠自己进行康复训练,故需要相关设备辅助,例如康复机器人,目前康复机器人会根据不同位置需求设计成相应形态,例如根据腿部训练需要设计成下肢双足形态。
2、现有的人形下肢康复机器人主要包括连接支座和腿部外骨骼机器,连接支座上用于安装控制系统以及电缆等组件,腿部外骨骼机器对称分布两组,连接在连接支座上,具体可参考授权公告号为cn213311456u的中国专利公开的一种下肢康复训练机器人,当需要进行下肢康复训练时,则使得患者上半身依靠束缚组件固定在连接支座上,并且双腿穿戴上腿部外骨骼机器,然后依靠步态模拟程序控制腿部外骨骼机器模拟步态运动,从而带动患者下肢模拟行走,实现康复训练。
3、现有的人形下肢康复机器人存在的不足之处在于:现有人形下肢康复机器人在使用时由于为了保证对患者进行稳定支撑,且还能保证带动患者下肢运动,故需要使得机器人依靠支座固定支撑在一个固定位置,然后患者需要将机器人的下肢运动组件穿戴到双腿上,然后原地进行步态模拟运动,只有穿戴好,才能确保康复训练安全进行,而由于患者下肢运动不便,严重的患者都需要轮椅辅助移动,如此在穿戴康复机器人时,则需要医疗辅助相关人员帮助患者穿戴,在穿戴过程中则需要先使得患者转移到符合机器人的穿戴位置上,然后进行穿戴,由于患者下肢不便,此过程中则需要辅助人员消耗较强劳动力去帮助患者移动调整身姿,并且在完成穿戴前,患者依靠自身无法保证身体平稳,则需要在穿戴过程中额外支撑,如此便需要穿戴辅助人员在支撑着患者身体的同时完成机器人穿戴,整个穿戴过程中操作繁琐,不够便捷,并且一旦没有扶住患者,还可能给患者造成伤害,虽然也可以在机器人设备对应位置摆放凳子等支撑件,但是辅助人员将患者转移到凳子上,以及完成穿戴后撤掉凳子避免影响训练运动等操作,均给机器人穿戴带来不便,导致使用效果不够好。
技术实现思路
1、本发明的目的在于提供一种人形下肢康复机器人,以解决现有技术中进行康复训练的人员在穿戴人形下肢康复机器人进行训练时,操作繁琐,不够便捷的技术问题。
2、本发明所要解决的技术问题可以通过以下技术方案实现:
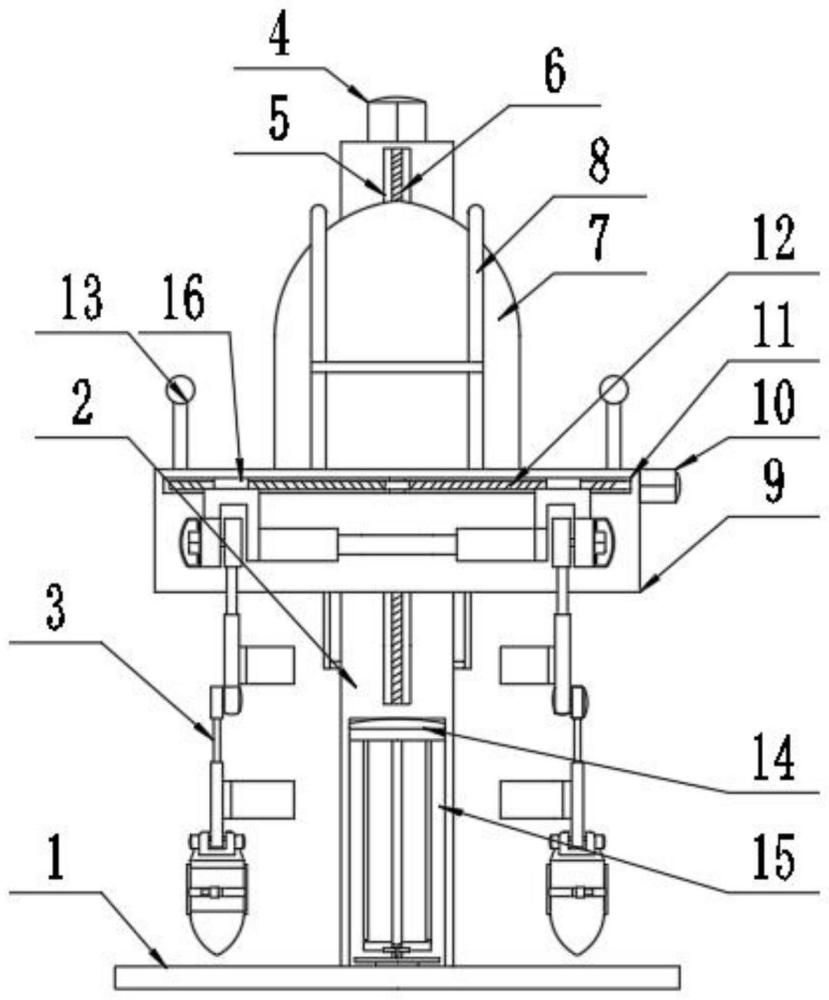
3、一种人形下肢康复机器人,包括支撑底座、纵向钢板和腿部助行机械体,所述纵向钢板固定连接在支撑底座上,所述腿部助行机械体设置有两组;还包括:
4、腰部升降组件,所述腰部升降组件包括腰板和升降驱动机构,所述升降驱动机构安装在纵向钢板上,所述腰板连接在升降驱动机构的升降端,且两组所述腿部助行机械体顶部均与腰板连接;
5、上肢穿戴组件,所述上肢穿戴组件设置在腰板上;
6、穿戴辅助座椅,所述穿戴辅助座椅包括连接导轨、座板和横移联动件,所述连接导轨安装在支撑底座上,所述纵向钢板靠近底部位置开设有收纳穿口,且连接导轨贯穿收纳穿口,所述连接导轨上滑动连接有滑座,所述座板设置在滑座上,所述横移联动件设置在滑座和腰板之间。
7、作为本发明进一步的方案:所述横移联动件包括升降架、联动杆和电动推杆,所述升降架连接在腰板的底部,所述联动杆通过铰链活动连接在升降架底端,所述电动推杆滑动连接在连接导轨上,且电动推杆的一端与滑座连接,另一端与联动杆通过铰链活动连接。
8、作为本发明进一步的方案:所述座板底部固定连接有轴柱,所述座板通过轴柱转动连接在滑座上,所述轴柱与滑座之间配合设置有锁扣机构。
9、作为本发明进一步的方案:所述锁扣机构包括圆板、升降卡栓机构和脚踏抬升机构,所述圆板同轴连接在轴柱的底部,所述圆板上周向等距开设有多个卡槽,所述升降卡栓机构和脚踏抬升机构均设置在滑座上,且升降卡栓机构与卡槽相配合,脚踏抬升机构与升降卡栓机构相配合。
10、作为本发明进一步的方案:所述升降卡栓机构包括伸缩连接杆、升降板和卡杆,所述伸缩连接杆连接在滑座上,所述升降板连接在伸缩连接杆的顶部,且升降板与伸缩连接杆的伸缩端之间连接有限位弹簧,所述卡杆连接在升降板的一端,且卡杆与卡槽相配合,升降板与脚踏抬升机构相配合。
11、作为本发明进一步的方案:所述脚踏抬升机构包括支撑架和脚踏转板,所述支撑架固定连接在滑座上,所述脚踏转板转动连接在支撑架顶部,所述脚踏转板的一端开设有u型卡口,所述u型卡口与伸缩连接杆的顶部相配合,且脚踏转板靠近u型卡口的一端处于升降板的底部。
12、作为本发明进一步的方案:所述升降驱动机构包括第一伺服电机、第一条形滑槽、第一调节螺杆和第一连接滑块,所述第一伺服电机固定连接在纵向钢板的顶部,所述第一条形滑槽开设在纵向钢板的前侧,所述第一调节螺杆转动连接在第一条形滑槽内,且第一调节螺杆与第一伺服电机的主轴连接,所述第一连接滑块滑动连接在第一条形滑槽内,第一连接滑块与腰板固定连接,且第一连接滑块还与第一调节螺杆螺纹连接。
13、作为本发明进一步的方案:所述腰板上横向开设有第二条形滑槽,所述第二条形滑槽内侧两端均转动连接有第二调节螺杆,两个所述第二调节螺杆同轴连接,所述第二条形滑槽内部两端还分别滑动连接有第二连接滑块,两个所述第二连接滑块分别与对应的第二调节螺杆螺纹连接,两个第二连接滑块还分别与对应的腿部助行机械体顶部连接,所述腰板的一端固定连接有第二伺服电机,且第二伺服电机的主轴与其中一个所述第二调节螺杆连接。
14、作为本发明进一步的方案:所述腿部助行机械体包括大腿支撑体、小腿支撑体和脚底板,所述大腿支撑体顶部设置有第一关节驱动件,且第一关节驱动件与对应的第二连接滑块连接,第一关节驱动件的驱动端与大腿支撑体顶部连接,所述大腿支撑体底部固定设置有第二关节驱动件,且第二关节驱动件的驱动电机与小腿支撑体的顶部连接,所述小腿支撑体的底部固定设置有第三关节驱动件,且第三关节驱动件的驱动端与脚底板连接,所述大腿支撑体、小腿支撑体和脚底板上均分布有第一绑带。
15、作为本发明进一步的方案:所述上肢穿戴组件包括背板和第二绑带,所述背板固定连接在腰板上,所述第二绑带连接在背板上。
16、本发明的有益效果:
17、1、本发明在进行腿部助行机械体佩戴时,则依靠升降驱动机构驱动腰板沿着纵向钢板下降,使得腿部助行机械体下降弯折,同时腰板还通过升降架作用联动杆,依靠联动杆推动设置的座板从纵向钢板滑至前侧,如此方便使用者坐在座板上面,身体得到支撑,从而便于医护辅助人员完成腿部设备穿戴,再通过升降驱动机构驱动腰板升起,腰板便依靠上肢穿戴组件将使用者提升起来,使其从坐姿转变为站姿,同时还通过联动杆拉动座板复位收纳起来,避免对训练运动产生妨碍,即依靠设置的座板支撑降低佩戴过程中医护辅助人员劳动强度,提升康复训练机器人穿戴操作便捷性,同时还可避免穿戴过程中对使用者可能造成的伤害。
18、2、本发明座板在腰板下降过程中联动滑出后,可依靠设置的电动推杆进一步操作滑出,使得座板靠近机器人设备外部边缘位置,如此方便坐在轮椅器械上的使用者快速平移至座板上,并且座板还可依靠轴柱旋转,带动坐在上面的使用者调整方位,确保面朝前方,背部靠向腰板,以便于快速满足穿戴位置进行机器人穿戴,减少辅助人员在康复训练人员穿戴机器人过程中辅助搬移操作,进一步针对自身行动不便的使用者实现穿戴操作优化,提升了穿戴安全性。
19、3、本发明座板依靠轴柱旋转,而轴柱底部圆板上的卡槽依靠卡杆限位卡住,避免随意发生旋转,当需要使得座板依靠轴柱旋转时,辅助人员直接用脚踩压脚踏转板一端,使得脚踏转板另一端顶升起升降板,从而依靠升降板带动卡杆升起,实现快速解锁,当需要再次限位锁定时,只需松开脚踏转板,升降板在便在限位弹簧回弹力作用下带动卡杆下降,卡入圆板上对应位置的卡槽内,实现快速锁定。
本文地址:https://www.jishuxx.com/zhuanli/20240614/86309.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。