参数自适应的水下航行器航向最优控制方法、系统及产品与流程
- 国知局
- 2024-09-11 14:35:08
本发明涉及水下航行器运动控制,尤其涉及一种参数自适应的水下航行器航向最优控制方法、系统及产品。
背景技术:
1、在船舶的运动控制中,航向控制是其中非常重要的一个方面,常用的控制方法有pid控制、bang-bang控制以及非线性控制等,这些方法在特定情况下确实能够取得不错的控制效果。但对于实际的船舶系统而言,其运动具有复杂性,航行环境的未知因素多且变化大,所以这些传统方法的实际控制效果往往欠佳。
2、最优控制方法是现代控制理论中的一种具有代表性的方法,相比于在船舶控制中被广泛使用的传统控制方法,最优控制的实施更加简单,无需人工调整参数,且控制效果良好。在实际使用最优控制方法时,对于需要提前确定的两个参数矩阵q和r,常常是根据经验人为选取的。这种人工选取的方法最大的缺点在于参数矩阵q和r的选择具有局限性,选取过程过于依赖调试人员的经验,不能够根据实际的水下航行器情况和控制效果自适应地调整其数值。q、r矩阵对于最优控制算法的性能有直接的影响,由于船舶系统结构复杂且具有不确定性,在参数固定的情况下往往无法保证方法达到最优的控制效果。因此,如何使得最优控制方法中的q矩阵和r矩阵能够根据实际控制效果进行自适应的寻优是非常关键的。
技术实现思路
1、本发明旨在解决船舶航向最优控制过程中参数选取不准、控制算法缺少自适应能力的问题。为此,本发明提供一种参数自适应的水下航行器航向最优控制方法、系统及产品,实现了水下航行器航向的自适应最优控制,减少了算法实现过程中的人员参与,提高了算法的可靠性,具有良好的应用前景。
2、本发明提供一种参数自适应的水下航行器航向最优控制方法,采用的技术方案如下:包括:
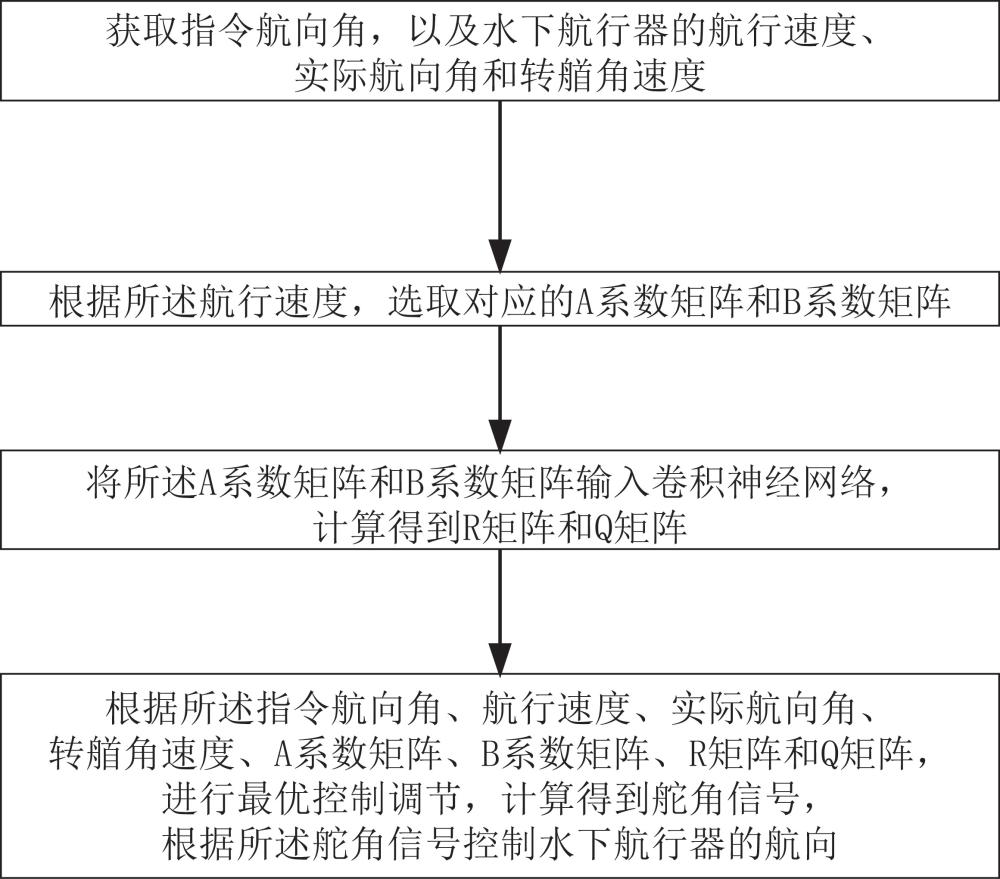
3、获取指令航向角,以及水下航行器的航行速度、实际航向角和转艏角速度;
4、根据所述航行速度,选取对应的a系数矩阵和b系数矩阵;
5、将所述a系数矩阵和b系数矩阵输入卷积神经网络,计算得到r矩阵和q矩阵;
6、根据所述指令航向角、航行速度、实际航向角、转艏角速度、a系数矩阵、b系数矩阵、r矩阵和q矩阵,进行最优控制调节,计算得到舵角信号,根据所述舵角信号控制水下航行器的航向。
7、进一步的,所述航行速度通过多普勒测速仪获得,所述实际航向角通过磁场强度传感器获得,所述转艏角速度通过陀螺仪获得。
8、进一步的,将所述a系数矩阵和b系数矩阵输入卷积神经网络,计算得到r矩阵和q矩阵的过程为:
9、将所述a系数矩阵和b系数矩阵拼接,得到增广矩阵,
10、将增广矩阵输入所述卷积神经网络,得到模型输出结果,所述模型输出结果为r矩阵和q矩阵的合并形式,
11、根据所述模型输出结果,得到r矩阵和q矩阵。
12、进一步的,所述卷积神经网络的结构为:依次连接的3个卷积层和1个全连接层。
13、进一步的,3个所述卷积层分别为第一卷积层、第二卷积层和第三卷积层,所述第一卷积层的卷积核为,所述第二卷积层的卷积核为,所述第三卷积层的卷积核为,3个所述卷积层后均设置有relu激活函数,所述全连接层后设置有prelu激活函数。
14、进一步的,所述卷积神经网络的损失函数loss为
15、
16、其中,表示实际航向角,表示指令航向角。
17、进一步的,根据所述指令航向角、航行速度、实际航向角、转艏角速度、a系数矩阵、b系数矩阵、r矩阵和q矩阵,进行最优控制调节,计算得到舵角信号的过程为:
18、将所述a系数矩阵、b系数矩阵、r矩阵和q矩阵,带入到riccati方程中,得到
19、,
20、其中,a表示a系数矩阵,b表示b系数矩阵,r表示r矩阵,q表示q矩阵,p表示常量矩阵p,
21、解得常量矩阵p,将所述常量矩阵p带入
22、,
23、解得系数矩阵k,k=[],将系数带入
24、,
25、计算得到舵角信号,其中,表示航行速度,表示转艏角速度,表示实际航向角,表示指令航向角。
26、本发明还提供一种参数自适应的水下航行器航向最优控制系统,采用的技术方案如下:包括:数据获取单元、ab系数矩阵计算单元、rq矩阵计算单元和最优控制调节单元,所述数据获取单元分别与所述ab系数矩阵计算单元、最优控制调节单元连接,所述ab系数矩阵计算单元分别与所述rq矩阵计算单元、最优控制调节单元连接,所述rq矩阵计算单元与所述最优控制调节单元连接,
27、所述数据获取单元,用于获取指令航向角,以及水下航行器的航行速度、实际航向角和转艏角速度;
28、所述ab系数矩阵计算单元,用于根据所述航行速度,选取对应的a系数矩阵和b系数矩阵;
29、所述rq矩阵计算单元,用于将所述a系数矩阵和b系数矩阵输入卷积神经网络,计算得到r矩阵和q矩阵;
30、所述最优控制调节单元,用于根据所述指令航向角、航行速度、实际航向角、转艏角速度、a系数矩阵、b系数矩阵、r矩阵和q矩阵,进行最优控制调节,计算得到舵角信号,根据所述舵角信号控制水下航行器的航向。
31、本发明还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的一种参数自适应的水下航行器航向最优控制方法。
32、本发明实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
33、1.本发明使用了卷积神经网络,使得最优控制方法中的q矩阵和r矩阵能够根据水下航行器的航向控制效果进行自动调整,不再需要人为预设,有效解决了船舶航向自动控制过程中参数选取不准、控制算法缺少自适应能力的问题。
34、2.本发明采用最优控制方法能够减少算法实现过程中的人员参与,直接解算得到最优控制参数,无需在不同试验条件下人工调整控制参数,避免了因人为的主观因素所导致的控制效果差的情况。
35、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种参数自适应的水下航行器航向最优控制方法,其特征在于,包括:
2.如权利要求1所述的一种参数自适应的水下航行器航向最优控制方法,其特征在于,所述航行速度通过多普勒测速仪获得,所述实际航向角通过磁场强度传感器获得,所述转艏角速度通过陀螺仪获得。
3.如权利要求1所述的一种参数自适应的水下航行器航向最优控制方法,其特征在于,将所述a系数矩阵和b系数矩阵输入卷积神经网络,计算得到r矩阵和q矩阵的过程为:
4.如权利要求1所述的一种参数自适应的水下航行器航向最优控制方法,其特征在于,所述卷积神经网络的结构为:依次连接的3个卷积层和1个全连接层。
5.如权利要求4所述的一种参数自适应的水下航行器航向最优控制方法,其特征在于,3个所述卷积层分别为第一卷积层、第二卷积层和第三卷积层,所述第一卷积层的卷积核为,所述第二卷积层的卷积核为,所述第三卷积层的卷积核为,3个所述卷积层后均设置有relu激活函数,所述全连接层后设置有prelu激活函数。
6.如权利要求4所述的一种参数自适应的水下航行器航向最优控制方法,其特征在于,所述卷积神经网络的损失函数loss为
7.如权利要求1所述的一种参数自适应的水下航行器航向最优控制方法,其特征在于,根据所述指令航向角、航行速度、实际航向角、转艏角速度、a系数矩阵、b系数矩阵、r矩阵和q矩阵,进行最优控制调节,计算得到舵角信号的过程为:
8.一种参数自适应的水下航行器航向最优控制系统,其特征在于,用以执行如权利要求1至7任一项所述的一种参数自适应的水下航行器航向最优控制方法,包括:数据获取单元、ab系数矩阵计算单元、rq矩阵计算单元和最优控制调节单元,所述数据获取单元分别与所述ab系数矩阵计算单元、最优控制调节单元连接,所述ab系数矩阵计算单元分别与所述rq矩阵计算单元、最优控制调节单元连接,所述rq矩阵计算单元与所述最优控制调节单元连接,
9.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至8中任一项所述的一种参数自适应的水下航行器航向最优控制方法。
技术总结本发明涉及水下航行器运动控制技术领域,具体公开了参数自适应的水下航行器航向最优控制方法、系统及产品,方法包括:获取指令航向角,以及水下航行器的航行速度、实际航向角和转艏角速度;根据所述航行速度,选取对应的A系数矩阵和B系数矩阵;将所述A系数矩阵和B系数矩阵输入卷积神经网络,计算得到R矩阵和Q矩阵;根据所述指令航向角、航行速度、实际航向角、转艏角速度、A系数矩阵、B系数矩阵、R矩阵和Q矩阵,进行最优控制调节,计算得到舵角信号,根据所述舵角信号控制水下航行器的航向。本发明实现了水下航行器航向的自适应最优控制,减少了算法实现过程中的人员参与,提高了算法的可靠性,具有良好的应用前景。技术研发人员:廖益欣,苏畅,沈东,谌兴良,张远博,李义慎,王星月,鲁妤知受保护的技术使用者:中国船舶集团有限公司第七〇七研究所技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/291475.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表