用于飞行器滚转方向旋转动导数计算的输入参数确定方法与流程
- 国知局
- 2024-09-11 14:27:38
本发明涉及航空航天飞行器,具体涉及用于飞行器滚转方向旋转动导数计算的输入参数确定方法。
背景技术:
1、本节中的陈述仅提供与本公开相关的背景信息,并且可能不构成现有技术。
2、数值计算是目前获取飞行器动导数的一种主要方法。一般数值计算方法是指采用计算流体力学(cfd)技术获取飞行器动导数的方法。目前基于cfd的数值计算方法主要包括模拟飞行器强迫振动的非定常计算方法、基于谐波平衡法的非定常频域计算方法、以及基于cfd的准定常计算方法等。
3、模拟飞行器强迫振动的非定常计算方法需要耦合求解ns方程和六自由运动方程,计算周期较长,比一般静态气动力计算复杂,计算效率较低。此外,采用强迫振动求解飞行器气动导数的一个重要缺点是存在减缩频率的选择问题。相较于模拟飞行器强迫振动的非定常计算方法,基于谐波平衡法的非定常频率计算方法计算效率相对较高,其只需要求解几个特定时刻的定常流场,再通过重建整个非定常周期的非定常流动即可,但是该方法同样存在减缩频率的选择问题。减缩频率的选择问题主要表现是减缩频率的选取对飞行器动导数的预测有重要影响。
4、研究表明,减缩频率的大小会影响气动导数的量值甚至符号。基于cfd的准定常计算方法则不涉及飞行器减缩频率的选取问题,其在已知飞行器滚转角速率的情况下,采用旋转坐标系或者边界条件施加牵连速度等方式模拟飞行器在攻角不变时绕滚转轴以恒定角速度转动,通过求解2个不同滚转角速度的准定常计算状态或者1个滚转角速度的准定计算状态+1个无角速度的定常计算状态,得到飞行器滚转力矩系数对滚转角速度的导数,即滚转方向旋转动导数,因此其计算效率较高,能够快速方便地求解旋转动导数。
5、但是采用基于旋转坐标系的准定常计算方法预测飞行器滚转方向旋转动导数涉及到输入参数的确定问题。即准确模拟飞行器滚转方向的旋转运动,需要明确用于cfd模拟计算的输入参数,也就是在cfd计算时对计算流体力学软件或求解器设置准确的运动参数和来流参数等输入条件。在非零侧滑角等状态下,飞行器来流工况相对复杂,容易使得针对飞行器滚转方向旋转运动模拟计算的输入参数出错。而不合适或错误的输入参数将导致无法正确模拟飞行器滚转方向的旋转运动,进而无法得到正确的飞行器滚转方向旋转动导数。
技术实现思路
1、本发明的目的在于:针对现有技术中存在的问题,提供了用于飞行器滚转方向旋转动导数计算的输入参数确定方法,该方法基于飞行器的特定飞行状态等已知参数和滚转方向旋转动导数的计算需求,主要通过计算飞行器的飞行速度、确定飞行器的滚转角速度、确定飞行器计算坐标系和机体坐标系、确定模拟飞行器滚转方向运动的飞行器旋转平面、定义模拟飞行器滚转方向运动的飞行器摆放位置、根据飞行器特定飞行状态分解相对于飞行器的气流速度、根据三角形几何相似定理分解旋转中心到飞行器质心的距离等,实现计算坐标系下飞行器旋转中心坐标、旋转角速度等运动参数以及马赫数、攻角和侧滑角等来流参数的计算,为采用基于旋转坐标系的准定常计算方法计算飞行器滚转方向旋转动导数确定cfd计算的输入参数;通过计算确定不同旋转中心坐标和来流条件等输入参数,可以帮助基于旋转坐标系的准定计算方法实现在同一套计算网格下不同攻角和侧滑角组合状态的飞行器滚转方向旋转动导数快速计算;该方法提高了飞行器滚转方向旋转动导数整个计算流程的工作效率,并减少了错误的输入参数发生。
2、本发明的技术方案如下:
3、用于飞行器滚转方向旋转动导数计算的输入参数确定方法,包括:
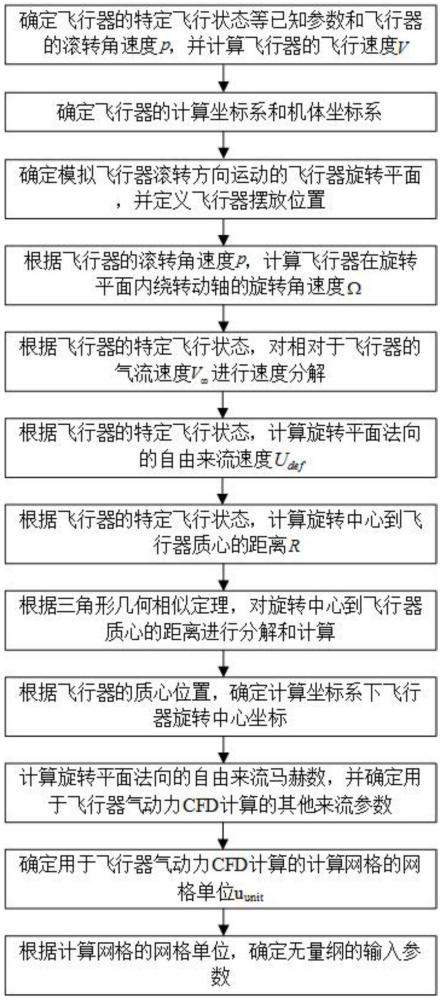
4、步骤s1:确定飞行器的特定飞行状态已知参数和飞行器的滚转角速度,并计算飞行器的飞行速度;
5、步骤s2:确定飞行器的计算坐标系和机体坐标系;
6、步骤s3:确定模拟飞行器滚转方向运动的旋转平面,并定义飞行器摆放位置;
7、步骤s4:根据飞行器的滚转角速度,计算飞行器在旋转平面内绕转动轴运动的旋转角速度;
8、步骤s5:根据飞行器的特定飞行状态,对相对于飞行器的气流速度进行速度分解;
9、步骤s6:根据飞行器的特定飞行状态,计算旋转平面法向的自由来流速度;
10、步骤s7:根据飞行器的特定飞行状态,计算旋转中心到飞行器质心的距离;
11、步骤s8:根据三角形几何相似定理,对旋转中心到飞行器质心的距离进行分解和计算;
12、步骤s9:根据飞行器的质心位置,确定计算坐标系下飞行器旋转中心坐标;
13、步骤s10:计算旋转平面法向的自由来流马赫数,并确定用于飞行器气动力cfd计算的其他来流参数;
14、步骤s11:确定用于飞行器气动力cfd计算的计算网格的网格单位;
15、步骤s12:根据计算网格的网格单位,确定无量纲的输入参数。
16、进一步地,所述已知参数,包括:飞行马赫数m、飞行器飞行攻角α、飞行器飞行侧滑角β、飞行器滚转角速度为p、当地音速a;
17、飞行器的飞行速度采用如下公式计算:
18、v=m·a
19、其中:v为飞行器的飞行速度。
20、进一步地,所述步骤s2,包括:
21、确定飞行器计算坐标系为x轴沿水平面从前指向后,y轴在水平面内垂直于x轴指向飞行器的右侧,z轴按右手法则铅垂向上为正的坐标系;在计算坐标系下,x轴由飞行器机头指向飞行器机尾,z轴由飞行器腹部一侧指向飞行器背部一侧;飞行器的计算坐标系的原点可以在飞行器头部顶点上,也可以在其他位置上;
22、确定飞行器机体坐标系的三轴方向与飞行器计算坐标系的三轴方向相同,其中飞行器机体坐标系的原点位于飞行器的质心上;
23、在计算坐标系下,飞行器的质心坐标以(xcg,ycg,zcg)表示。
24、进一步地,所述步骤s3,包括:
25、所述旋转平面为机体坐标系下的yz平面,也就是计算坐标系下的yz平面;
26、在旋转平面内,模拟飞行器绕转动轴做恒角速率运动,该角速率即为飞行器绕体轴x的滚转角速度p;转动轴与旋转平面的交点为旋转中心;规定飞行器的摆放位置为:飞行器的体轴x平行于转动轴,且垂直于旋转平面指向外;飞行器的背部一侧靠近转动轴方向,飞行器的腹部一侧远离转动轴方向;飞行器在旋转平面内绕转动轴做旋转运动的方向为逆时针方向;在旋转平面内,飞行器质心运动轨迹为一圆圈形状。
27、进一步地,所述飞行器在旋转平面内绕转动轴运动的旋转角速度采用如下公式计算:
28、
29、其中:ω为飞行器在旋转平面内绕转动轴运动的旋转角速度。
30、进一步地,所述步骤s5,包括:
31、当从飞行器本体上进行观察时,相对于飞行器的气流速度即与飞行器的运动速度在数值上相等;以v∞表示相对于飞行器的气流速度,则有v∞=|v|;将相对于飞行器的气流速度v∞在计算坐标系下进行速度分解,其中体轴y的速度分量为-v∞sinβ,相对于飞行器的气流速度v∞在飞行器纵向对称平面即xz平面内的投影为v∞cosβ,该速度投影v∞cosβ在体轴x的速度分量为v∞cosβcosα,在体轴z的速度分量为v∞cosβsinα。
32、进一步地,所述旋转平面法向的自由来流速度采用如下公式计算:
33、udef=v∞cosβcosα
34、其中:udef为旋转平面法向的来流速度;
35、所述旋转中心到飞行器质心的距离采用如下公式计算:
36、
37、其中:r为旋转中心到飞行器质心的距离。
38、进一步地,所述步骤s8,包括:
39、
40、其中:|δy|为旋转中心与飞行器法向体轴即z轴之间的距离;|δz|为旋转中心与飞行器的体轴y之间的距离;
41、所述步骤s9,包括:
42、所述计算坐标系下飞行器旋转中心坐标为(xcg,ycg+δy,zcg+δz)。
43、进一步地,所述步骤s10,包括:
44、mdef=|udef|/a
45、其中:mdef为旋转平面法向的自由来流马赫数;
46、所述其他来流参数,包括:自由来流攻角αdef、自由来流侧滑角βdef;确定βdef=0°,αdef=0°。
47、进一步地,所述步骤s11,包括:
48、针对飞行器模型,采用软件生成用于气动力cfd计算的计算网格;在生成计算网格时,确定飞行器计算网格的网格单位uunit;规定:若网格单位为m,则uunit=1;若网格单位为mm,则uunit=0.001;
49、所述步骤s12,包括:
50、根据步骤s11确定的网格单位uunit,再对ω和旋转中心坐标(xr,yr,zr)进行无量纲化,得到飞行器绕转动轴的无量纲旋转角速度在计算坐标系下飞行器旋转中心无量纲坐标
51、在上述计算方法中,本发明所述用于飞行器滚转方向旋转动导数计算的输入参数主要由运动参数和来流参数组成,其中运动参数主要包括飞行器在旋转平面内的旋转角速度、在计算坐标系下飞行器旋转中心坐标等参数,来流参数主要包括旋转平面法向的自由来流马赫数、自由来流攻角和自由来流侧滑角等参数。在采用旋转坐标系方法计算滚转方向旋转动导数时,需要确定这些有量纲或无量纲参数的数值,以作为cfd计算的输入条件。
52、在上述计算方法中,本发明所述飞行器的特定飞行状态为(m、α和β),其中m为飞行器的飞行马赫数,α为飞行器飞行攻角,β为飞行器飞行侧滑角。
53、在上述计算方法中,本发明所述已知参数,除了飞行器的特定飞行状态参数外,还包括飞行器的滚转角速度p、以及当地音速a等。
54、在上述计算方法中,本发明所述飞行器滚转方向旋转动导数计算是指计算飞行器在特定飞行状态(m、α和β)下的滚转方向旋转动导数。
55、在上述计算方法中,本发明所述飞行器飞行攻角、飞行侧滑角的单位均为°,飞行器飞行速度、当地音速的单位均为m/s,飞行器滚转角速度的单位为°/s,飞行器在旋转平面内旋转角速度的单位为rad/s。
56、在上述计算方法中,本发明所述自由来流攻角、自由来流侧滑角的单位均为°。
57、与现有的技术相比本发明的有益效果是:
58、本发明基于飞行器的特定飞行状态等已知参数和滚转方向旋转动导数的计算需求,主要通过计算飞行器的飞行速度、确定飞行器的滚转角速度、确定飞行器计算坐标系和机体坐标系、确定模拟飞行器滚转方向运动的旋转平面、定义飞行器模拟滚转方向运动的摆放位置、根据飞行器特定飞行状态分解相对于飞行器的气流速度、根据三角形几何相似定理分解旋转中心到飞行器质心的距离等,实现计算坐标系下飞行器旋转中心坐标、旋转角速度等运动参数以及马赫数、攻角和侧滑角等来流参数的计算,为采用基于旋转坐标系的准定常计算方法计算飞行器滚转方向旋转动导数确定cfd计算的输入参数。该方法通过计算确定不同旋转中心坐标和来流条件等输入参数,可以帮助基于旋转坐标系的准定计算方法实现在同一套计算网格下不同攻角和侧滑角组合状态的飞行器滚转方向旋转动导数快速计算。该方法提高了飞行器滚转方向旋转动导数整个计算流程的工作效率,并减少了错误的输入参数发生。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290927.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。