一种基于单目相机的图片位置与病害数据的映射方法与流程
- 国知局
- 2024-09-11 14:26:56
本发明涉及道路工程,具体为一种基于单目相机的图片位置与病害数据的映射方法。
背景技术:
1、在地理信息科学和道路工程领域,将实地采集的gps数据转换为cad可识别的二维平面坐标是实现精确道路设计和养护的关键步骤。传统的坐标转换方法存在局限性,如难以精确反映道路病害的空间位置和尺寸,导致后续分析和决策的不准确。因此,开发一种精确的映射计算方法,将球面坐标系统(gps坐标)转换为平面坐标系统(直角坐标),并准确反映道路病害的几何特征,具有重要的实际应用价值。
技术实现思路
1、为实现上述目的,本发明提供如下技术方案:一种基于单目相机的图片位置与病害数据的映射方法,包括以下步骤:
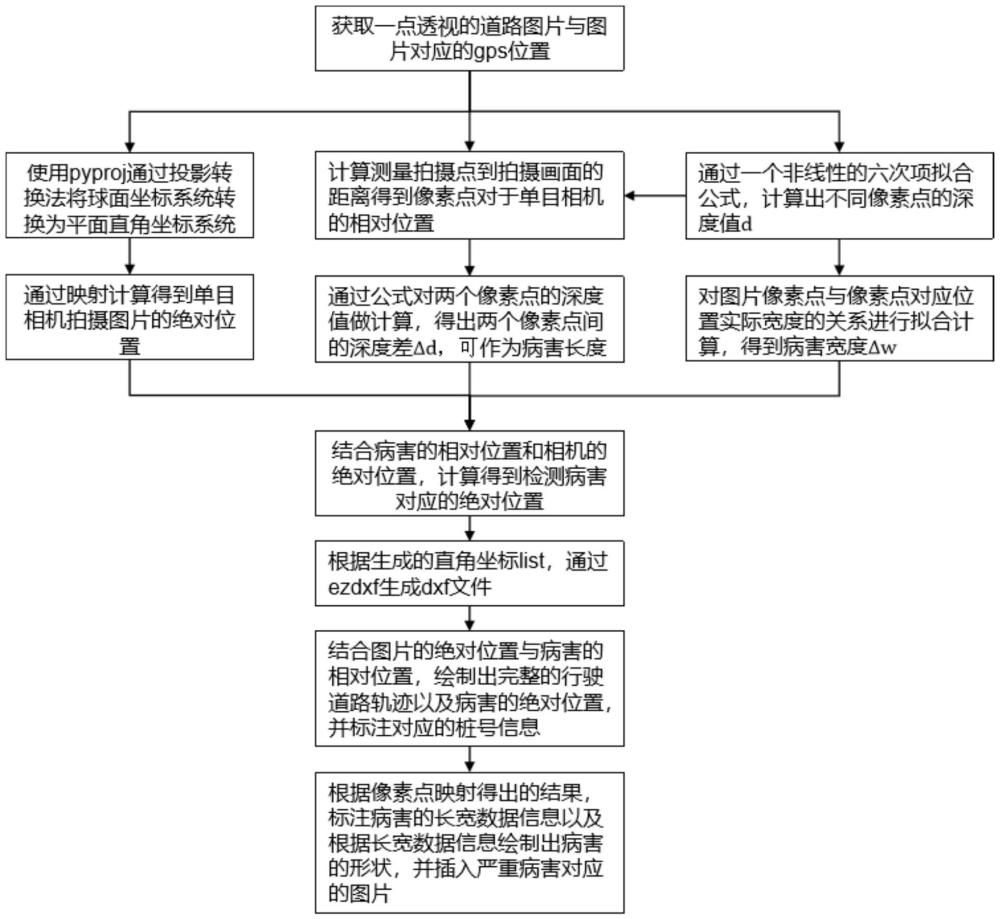
2、步骤1:获取真实世界绝对位置:获得图片拍摄位置在真实世界的gps绝对位置;
3、步骤2:病害的相对位置计算:图片像素点坐标用(x,y)表示,图片的分辨率用(width,height)表示,通过一个非线性拟合公式或深度估计模型得到f(y),计算出不同像素点实际与拍摄点的距离(即像素点对应的深度值d),即像素点对单目相机的相对位置;通过公式δd=|d2-d1|=|f(y2)-f(y1)|对两个像素点的深度值做计算,获取病害长度;
4、步骤3:病害的宽度计算:对图片像素点与像素点对应位置实际宽度的关系进行拟合计算,通过一个非线性拟合公式g(y)计算出像素点对应深度位置的真实宽度,再结合相机中心点所在的像素点水平方向上的像素位置w_c,能够得到目标像素点到相机的水平偏移距离w=x/width*g(y)-w_c,即计算出病害宽度;
5、步骤4:病害的绝对位置计算:对于相机绝对位置的计算,使用pyproj通过投影转换法将球面坐标系统(gps坐标)转换为平面直角坐标系统,从而得出图片拍摄的绝对位置;最后通过结合病害的相对位置和相机的绝对位置,可计算得到检测病害对应的绝对位置;数据处理结束后,根据gps坐标转换生成的直角坐标,通过ezdxf生成dxf文件,绘制出完整的拍摄轨迹;结合每一张图片的位置与图中识别出病害的相对位置,再通过三角函数计算出拍摄方向,根据像素点映射得出的长宽数据信息绘制出病害的方位和区域,标注病害的长宽数据信息与桩号信息。
6、优选的,在步骤1中,真实世界的绝对位置获取是将获取到的单目相机所拍摄的图片像素的相对位置与图片对应的绝对位置结合,从而可获得图片中像素在真实世界的绝对位置。
7、优选的,在步骤2中,通过公式计算可得出的两个像素点间的深度差,该深度差即是获取到的病害的长度。
8、优选的,在步骤3中,病害宽度的计算公式为δw=|w2-w1|=|x2/width*g(y2)-x1/width*g(y1)|;
9、其中,可通过δw表示横向裂缝的宽度,通过δd表示纵向裂缝的长度,块状裂缝的影响面积可以通过δd*δw表示。
10、优选的,在步骤4中,识别出的病害的相对位置包括病害对拍摄点的深度值和水平偏移距离。
11、优选的,在步骤4中,病害的长宽数据信息与桩号信息标注后在生成的cad文件中插入严重病害对应的图片,辅以病害图例示意图。
12、与现有技术相比,本发明的有益效果是:
13、本发明专利通过非线性拟合方法与经纬度映射公式准确计算出道路病害的相对位置和绝对位置,并将病害的实际几何尺寸与严重病害对应的病害照片绘制在dxf文件中,以便于在cad软件中进行进一步的设计和分析,从而在道路养护领域中达到辅助决策的作用。
14、本发明能够实现基于pyproj从球面坐标到平面直角坐标的转换,在实际应用中,通过非线性拟合准确计算了图片像素点与拍摄点的深度关系和水平偏移关系,同时通过像素点映射关系计算出病害框的长宽数据信息,通过结合图片的绝对位置与病害框像素点基于拍摄点的相对位置,可以计算出病害的绝对位置,并得出病害框的长宽、桩号等信息,从而达到节省人工测量成本、规避人工测量安全隐患的目的。
技术特征:1.一种基于单目相机的图片位置与病害数据的映射方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于单目相机的图片位置与病害数据的映射方法,其特征在于:在步骤1中,真实世界的绝对位置获取是将获取到的单目相机所拍摄的图片像素的相对位置与图片对应的绝对位置结合,从而可获得图片中像素在真实世界的绝对位置。
3.根据权利要求1所述的一种基于单目相机的图片位置与病害数据的映射方法,其特征在于:在步骤2中,通过公式计算可得出的两个像素点间的深度差,该深度差即是获取到的病害的长度。
4.根据权利要求1所述的一种基于单目相机的图片位置与病害数据的映射方法,其特征在于:在步骤3中,病害宽度的计算公式为δw=|w2-w1|=|x2/width*g(y2)-x1/width*g(y1)|;
5.根据权利要求1所述的一种基于单目相机的图片位置与病害数据的映射方法,其特征在于:在步骤4中,识别出的病害的相对位置包括病害对拍摄点的深度值和水平偏移距离。
6.根据权利要求1所述的一种基于单目相机的图片位置与病害数据的映射方法,其特征在于:在步骤4中,病害的长宽数据信息与桩号信息标注后在生成的cad文件中插入严重病害对应的图片,辅以病害图例示意图。
技术总结本发明公开了一种基于单目相机的图片位置与病害数据的映射方法;本发明专利通过非线性拟合方法与经纬度映射公式准确计算出道路病害的相对位置和绝对位置,并将病害的实际几何尺寸与严重病害对应的病害照片绘制在dxf文件中,以便于在CAD软件中进行进一步的设计和分析。本发明能够实现基于pyproj从球面坐标到平面直角坐标的转换,在实际应用中,通过非线性拟合准确计算了图片像素点与拍摄点的深度关系和水平偏移关系,通过像素点映射关系计算出病害框的长宽数据信息,通过结合图片的绝对位置与病害框像素点基于拍摄点的相对位置,计算出病害的绝对位置,并得出病害框的长宽、桩号等信息,达到节省人工测量成本、规避人工测量安全隐患的目的。技术研发人员:许鹏健,姜增彬,黄天宇,范志豪,江懿珂,朱嘉欣,陈铭杰,刘贤义,谢佳如,陈杰鑫,贺坤,黄业勇,吴建华,郭太军,黄枭,郑子钊,刘小兰,刘远鸟受保护的技术使用者:中恩工程技术有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290854.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。