一种智能驾驶控制系统及汽车的制作方法
- 国知局
- 2024-09-11 14:26:54
本发明涉及汽车智能控制,具体涉及一种智能驾驶控制系统及汽车。
背景技术:
1、随着近年来,汽车的智能化进程的不断推进,同时软硬件技术的不断突破,大算力的soc(system on chip,系统级芯片)越来越多,能够跑的高级算法也越来越多。同时现在智能汽车的智能程度正处于l2级(部分自动化)向l3级(有条件自动化)发展,甚至部分地区已经出现自动驾驶的出租车。从智能驾驶用到的传感器来看,视觉传感器(前视)在智能驾驶中就像人的眼睛一样,能够对物体进行分类,比如交通标志、车辆、行人等进行分类,是智能驾驶过程中最为重要的感知来源。
2、现有技术为了保证智能驾驶系统的可靠性,多采用冗余系统进行控制,但是一般设置两套相对独立的智能驾驶域控制器进行冗余,系统复杂,存在布置困难的问题。
技术实现思路
1、有鉴于此,本发明提供了一种智能驾驶控制系统及汽车,以解决智能驾驶冗余系统布置困难的问题。
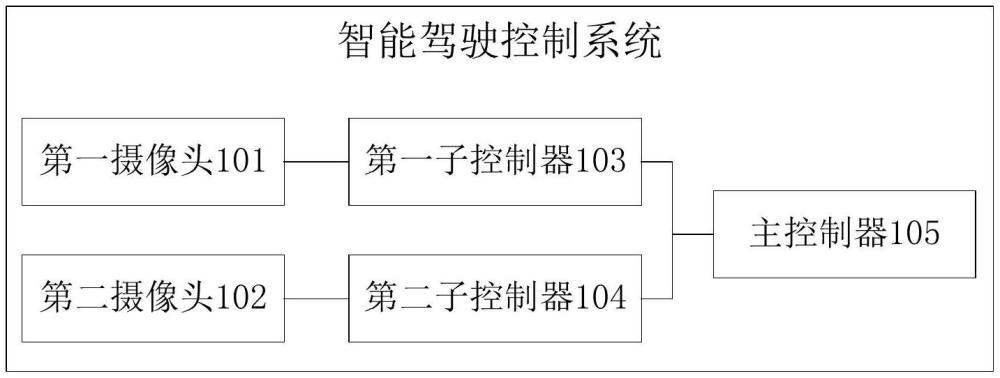
2、第一方面,本发明提供了一种智能驾驶控制系统,系统包括:
3、第一摄像头,用于采集汽车外部图像,生成第一图像信号;
4、第二摄像头,用于采集汽车外部图像,生成第二图像信号;
5、至少两个子控制器,子控制器与第一摄像头和第二摄像头连接,用于获取第一图像信号和第二图像信号,并根据第一图像信号和/或第二图像信号生成智能驾驶控制信号;
6、主控制器,与至少两个子控制器连接,用于获取至少两个子控制器生成的至少两个智能驾驶控制信号,并在至少两个子控制器均未出现故障时,在至少两个智能驾驶控制信号中选择最佳智能驾驶控制信号,根据最佳智能驾驶控制信号控制汽车行驶,若最佳智能驾驶控制信号所对应子控制器出现故障,则根据未出现故障的子控制器的智能驾驶控制信号控制汽车行驶。
7、本发明实施例提供的智能驾驶控制系统,通过第一摄像头和第二摄像头采集汽车外部图像,生成两路图像信号,至少两个子控制器根据双路图像信号生成至少两个智能驾驶信号,主控制器在子控制器均未所出现故障时,在至少两个智能驾驶控制信号中选择最佳智能驾驶控制信号,以控制汽车行驶,若最佳智能驾驶控制信号所对应子控制器出现故障,则根据未出现故障的子控制器的智能驾驶控制信号控制汽车行驶。本发明通过部署两个子控制器,能够使两个子控制器互为冗余,当两个子控制器未失效时提供l3及l3以上高级别智能驾驶功能,当某个子控制器失效时继续保证l3以下低级别智能驾驶功能的正常运行,而且冗余系统结构简单,容易布置。
8、在一种可选的实施方式中,第一摄像头和第二摄像头按照预设水平间距固定为一体,并安装于汽车前挡风玻璃中心线的预设高度处。
9、本发明将两个摄像头固定在同一区域,能够方便摄像头之间的标定,同时提供双路图像信息,实现控制器的双目识别模型,识别精度更高。
10、在一种可选的实施方式中,还包括:供电电源,通过独立保险线路分别与第一摄像头、第二摄像头和至少两个子控制器连接,用于为第一摄像头、第二摄像头和至少两个子控制器进行独立供电。
11、本发明通过为各摄像头和各子控制器进行独立供电,能够避免由于电源短路烧坏保险时,整个系统同时损坏,提高系统运行的可靠性与稳定性。
12、在一种可选的实施方式中,根据所述第一图像信号和/或所述第二图像信号生成智能驾驶控制信号包括:检测所述第一摄像头和所述第二摄像头是否出现故障;若所述第一摄像头和所述第二摄像头均未出现故障,则根据所述第一图像信号和所述第二图像信号组成的双路图像信号生成智能驾驶控制信号;若所述第一摄像头和所述第二摄像头中任意一个出现故障,则根据未出现故障摄像头的单路图像信号生成智能驾驶控制信。
13、本发明通过摄像头互为冗余,能够在控制器互为冗余的基础上,增加系统的冗余方式,使得在摄像头或控制器出现单独故障时,仍然能够保证智能驾驶功能的正常运行,从而降低系统故障概率,提高系统的稳定性。
14、在一种可选的实施方式中,至少两个子控制器互相连接,在至少两个子控制器生成至少两个智能驾驶控制信号之后,还包括:至少两个子控制器根据双路图像信号或单路图像生成至少两个控制目标信息;至少两个子控制器将各自生成的智能驾驶控制信号和控制目标信息发送至对方进行同步;其中,智能驾驶控制信号包括:工作模式、模型识别模式、制动控制指令、转向控制指令和加速控制指令,控制目标信息包括:目标类型、目标运动属性、目标纵向距离、目标横向距离、目标横向速度、目标纵向速度、目标所在车道位置和目标置信度。
15、本发明通过同步两个子控制器的相关信息,能够在其中一个出现故障时,由另一个未出现故障子控制器接管,并根据出现故障子控制器的相关信息继续生成智能驾驶控制信号,从而能够平滑的控制车辆,保证汽车驾驶安全和驾驶平稳度。
16、在一种可选的实施方式中,至少两个子控制器的故障检测,包括:主控制器校验是否接收到子控制器的智能驾驶控制信号,并根据接收情况判断子控制器是否出现通信故障;根据智能驾驶控制信号中工作模式判断子控制器是否出现工作故障;若出现通信故障或工作故障中的任意一种,则子控制器出现故障,若未出现通信故障和工作故障,则子控制器未出现故障。
17、本发明通过检测两个子控制器的故障情况,能够及时掌握汽车当前状态,从而在某个子控制器发生故障时及时调整智能驾驶控制策略,保证智能驾驶功能能在最大程度上的正常运行。
18、在一种可选的实施方式中,在至少两个智能驾驶控制信号中选择最佳智能驾驶控制信号,根据最佳智能驾驶控制信号控制汽车行驶,包括:主控制器对至少两个子控制器的控制目标信息进行对比,判断至少两个子控制器的控制目标是否为同一个;若为同一个,则判断至少两个子控制器的性能是否相同,若不为同一个,则不选择任意一个智能驾驶控制信号;若至少两个子控制器的性能相同,则根据控制目标信息中目标置信度,选择高目标置信度子控制器发出的智能驾驶控制信号作为最佳智能驾驶控制信号,并根据最佳智能驾驶信号控制汽车按照预设驾驶模式行驶;若至少两个子控制器的性能不同,则选择高性能子控制器发出的智能驾驶控制信号作为最佳智能驾驶控制信号,并根据最佳智能驾驶信号控制汽车按照预设驾驶模式行驶。
19、本发明通过对两个子控制器的控制目标进行对比,能够保证智能驾驶是根据同一控制目标进行的,避免由于目标不同而导致智能驾驶出现混乱。此外,通过选取最佳智能驾驶控制信号,能够为智能驾驶提供更准确的控制指令,从而保证智能驾驶的可靠性和安全性。
20、在一种可选的实施方式中,若最佳智能驾驶控制信号所对应子控制器出现故障,则根据未出现故障的子控制器的智能驾驶控制信号控制汽车行驶,包括:若高目标置信度子控制器或高性能子控制器出现故障,则切换为未出现故障的低目标置信度子控制器或低性能子控制器进行接管;低目标置信度子控制器或低性能子控制器对高目标置信度子控制器或高性能子控制器同步后的控制目标信息进行对比,判断控制目标是否为同一个;若为同一个,则以最佳智能驾驶控制信号为初始值,由低目标置信度子控制器生成智能驾驶控制信号,以控制汽车按照预设驾驶模式行驶,或降低驾驶模式,并以最佳智能驾驶控制信号为初始值,由低性能子控制器生成智能驾驶控制信号,以控制汽车按照降低后驾驶模式行驶;若不为同一个,则降低驾驶模式,并以最佳智能驾驶控制信号为初始值,由低目标置信度子控制器或低性能子控制器生成智能驾驶控制信号,以控制汽车按照降低后驾驶模式行驶。
21、本发明通过在子控制器工作过程中突然出现故障时,及时由未出现故障子控制器进行接管,能够最大程度上保证智能驾驶功能的正常运行,即使不能够提供高级别的智能驾驶功能,也能够通过降低驾驶模式,保证智能驾驶的安全,实现智能驾驶系统的冗余性。
22、在一种可选的实施方式中,若第一摄像头和第二摄像头均出现故障,则智能驾驶控制系统故障;或,若至少两个子控制器均出现故障,则智能驾驶控制系统故障。
23、本发明通过冗余性的智能驾驶系统,能够降低系统故障的概率,只有在两个摄像头或两个子控制器同时故障时,系统才会发生故障,但是设备同时发生故障的概率相对较低,因此能够保证智能驾驶的可靠性。
24、第二方面,本发明提供了一种汽车,包括上述第一方面或其对应的任一实施方式的智能驾驶控制系统。
25、本发明的有益效果:
26、(1)本发明通过搭载两个摄像头、两个子控制器和一个主控制器的智能驾驶控制系统,能够在保证智能驾驶控制系统冗余的基础上,降低系统布置难度,进而降低系统成本;
27、(2)本发明通过摄像头互为冗余和控制器互为冗余,能够实现智能驾驶控制系统的多种冗余,降低智能驾驶控制系统的故障概率,提高智能驾驶控制系统的可靠性和稳定性。
28、(3)本发明通过对各摄像头和各控制器进行独立供电,能够覆盖因为线路出现问题而导致的故障,进一步保证智能驾驶控制系统的可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290847.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表