一种基于期望危险的单车道跟车车辆选择方法与流程
- 国知局
- 2024-09-11 14:25:26
本发明涉及交通控制,具体而言,涉及一种基于期望危险的单车道跟车车辆选择方法。
背景技术:
1、随着科技的不断发展,汽车数量不断增加,导致交通拥堵问题日益严重,给人们的出行带来了很大困扰。因此,人们对自动驾驶技术的需求也越来越迫切,其中自动跟车技术尤为重要。目前的跟车方法主要采用类似贪心策略,即在每个时刻选择看似最优的解决方案,但这种方法并未充分考虑突发情况,并且在动态场景中仅依赖实时数据进行决策,对外界环境估计不足,导致对复杂环境的应对能力较差。
2、存在的问题是:现有的跟车方法仅依赖实时数据进行决策,对外界环境估计不足,导致对复杂环境的应对能力较差。
技术实现思路
1、本发明解决了现有的跟车方法仅依赖实时数据进行决策,对外界环境估计不足,导致对复杂环境的应对能力较差的技术问题。通过计算各障碍物的预测轨迹,并计算各障碍物与自车在本时刻的重叠率后选择跟车或者避让,增加了对外界环境的评估,有效提高了对复杂环境的应对能力。
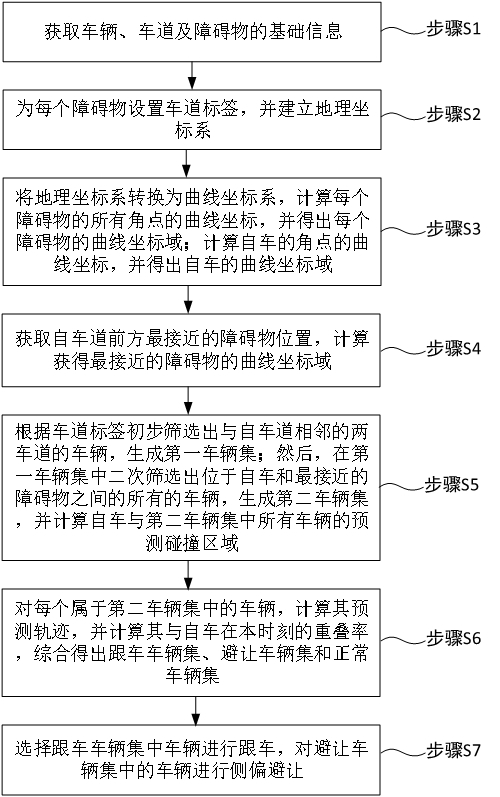
2、为解决上述问题,本发明提供一种基于期望危险的单车道跟车车辆选择方法,包括:步骤s1:获取车辆、车道及障碍物的基础信息;步骤s2:为每个障碍物设置车道标签,并建立地理坐标系;步骤s3:将地理坐标系转换为曲线坐标系,计算每个障碍物的所有角点的曲线坐标,并得出每个障碍物的曲线坐标域;计算自车的角点的曲线坐标,并得出自车的曲线坐标域;步骤s4:获取自车道前方最接近的障碍物位置,计算获得最接近的障碍物的曲线坐标域;步骤s5:根据车道标签初步筛选出与自车道相邻的两车道的车辆,生成第一车辆集;然后,在第一车辆集中二次筛选出位于自车和最接近的障碍物之间的所有的车辆,生成第二车辆集,并计算自车与第二车辆集中所有车辆的预测碰撞区域;步骤s6:对每个属于第二车辆集中的车辆,计算其预测轨迹,并计算其与自车在本时刻的重叠率,综合得出跟车车辆集、避让车辆集和正常车辆集;步骤s7:选择跟车车辆集中车辆进行跟车,对避让车辆集中的车辆进行侧偏避让。
3、与现有技术相比,采用该技术方案所达到的技术效果:通过计算各障碍物的预测轨迹,并计算各障碍物与自车在本时刻的重叠率,实现了对自车可能轨迹和他车可能轨迹的判断,从而增加了对外界环境的预判能力,有效提高了跟车系统对复杂环境的应对能力。同时,对小型汽车、大型汽车、自行车、行人和三轮车的识别,能够根据不同类型障碍物实时姿势,这有效提高了对弱势群体的关注,增加了系统对快速变化的实时路况的适应能力。
4、在本发明的一个实例中,步骤s1具体包括:获取车道线信息、自车底盘信息、定位信息、历史规划帧信息,以及感知障碍物信息。
5、与现有技术相比,采用该技术方案所达到的技术效果:通过获取车道线信息、自车底盘信息、定位信息、历史规划帧信息,以及感知障碍物信息可以帮助跟车系统更准确地理解周围环境,从而实现更精准的跟车行为,并且可以更加智能地进行跟车决策,提高行驶安全性和效率。
6、在本发明的一个实例中,步骤s3具体包括:步骤s31:参考车道线信息,综合生成跟车参考线;将跟车参考线作为纵轴,将障碍物和自车的地理坐标系转换为曲线坐标系;步骤s32:获取每个障碍物的所有的角点在曲线坐标系中纵向和横向的坐标,并依据每个障碍物角点的最大纵向坐标、最小纵向坐标、最大横向坐标和最小横向坐标得出每个障碍物的曲线坐标域;步骤s33:获取自车角点在曲线坐标系中纵向和横向的坐标,并依据自车角点的最大纵向坐标、最小纵向坐标、最大横向坐标和最小横向坐标得出自车的曲线坐标域。
7、与现有技术相比,采用该技术方案所达到的技术效果:通过参考车道线信息,能够更加准确地将地理坐标系转换为曲线坐标系,从而确定自车与障碍物的位置关系,以及得出更加完整的自车及每个障碍物的曲线坐标域。
8、在本发明的一个实例中,步骤s4具体包括:获取自车道前方最接近的障碍物位置,并计算最接近的障碍物在曲线坐标系中相应的最大纵向坐标、最小纵向坐标、最大横向坐标和最小横向坐标,得出最接近的障碍物的曲线坐标域。
9、与现有技术相比,采用该技术方案所达到的技术效果:通过获取自车道前方最接近的障碍物位置,跟车系统能够确定自车道前方最接近障碍物的曲线坐标域,进而计算自车与该障碍物的预测轨迹,从而实现对潜在危险的有效预判。
10、在本发明的一个实例中,步骤s5具体包括:步骤s51:根据设置好的车道标签筛选出与自车道相邻的两车道中的所有的车辆,并生成第一车辆集;步骤s52:在第一车辆集中筛选出纵坐标属于自车的最小纵坐标和最接近的障碍物的最小纵坐标之间的所有车辆,并生成第二车辆集;步骤s53:计算自车与第二车辆集中所有车辆的预测碰撞区域,并生成预测碰撞区域集。
11、与现有技术相比,采用该技术方案所达到的技术效果:通过为每个障碍物设置车道标签,系统能够在进行跟车选择时快速定位位于自车道两侧车道中的车辆,有助于缩短反应时长,从而提高跟车系统的安全性。此外,通过两次筛选,系统能够有效判断并生成预测碰撞区域。
12、在本发明的一个实例中,步骤s6具体包括:步骤s61:确定横向判定阈值;步骤s62:结合横向判定阈值遍历第二车辆集,计算出第二车辆集中每个车辆的预测轨迹;步骤s63:对第二车辆集中每个车辆计算期望危险,获取每个车辆轨迹点和自车轨迹点,从而计算每个车辆和自车在本时刻的横向阈值的重叠区域,并计算重叠率;步骤s64:根据重叠率确定第二车辆集中跟车车辆集、避让车辆集和正常车辆集。
13、与现有技术相比,采用该技术方案所达到的技术效果:通过对每个车辆和自车在本时刻的重叠率的计算,能够有效判断自车与其他车辆碰撞的可能,从而实现区分出跟车车辆集、避让车辆集和正常车辆集。
14、在本发明的一个实例中,横向判定阈值的取值范围在自车最小横坐标的值减去车道宽度的值,到自车最大横坐标的值加上车道宽度的值之间。
15、与现有技术相比,采用该技术方案所达到的技术效果:通过设置横向判定阈值可以确保车辆在跟车过程中保持安全的横向距离,避免与其他车辆相撞或者偏离车道,从而提高系统的安全性,以及提升行驶的平稳性。
16、在本发明的一个实例中,步骤s63包括:步骤s631:初始化变量,变量包括开始时间、结束时间、时间间隔、折扣系数和重叠率;步骤s632:获取本时刻每个车辆轨迹点的最大纵向坐标、最小纵向坐标、最大横向坐标和最小横向坐标,以及自车本时刻轨迹点的最大纵向坐标、最小纵向坐标、最大横向坐标和最小横向坐标;步骤s633:计算每个车辆和自车在本时刻的横向阈值的重叠区域,并通过本时刻每个车辆轨迹点的最大横向坐标、本时刻自车轨迹点的最大横向坐标和车道宽度,计算每个车辆和自车在本时刻的重叠率。
17、与现有技术相比,采用该技术方案所达到的技术效果:通过计算每个车辆和自车在本时刻的横向阈值的重叠区域和重叠率可以帮助自动跟车系统更准确地评估车辆之间的横向位置关系,从而实现更智能的跟车决策。并且,综合利用重叠区域和重叠率的信息,跟车系统可以更加智能地进行横向位置控制,提高跟车行为的安全性和稳定性
18、在本发明的一个实例中,步骤s64包括:若车辆的重叠率在跟车率阈值至正无穷大的范围内,则车辆属于跟车车辆集;若车辆的重叠率等于避让率阈值,则车辆属于避让车辆集;若车辆的重叠率在大于等于零且小于避让率阈值的范围内,则车辆属于正常车辆集。
19、与现有技术相比,采用该技术方案所达到的技术效果:通过重叠率区分出跟车车辆集、避让车辆集和正常车辆集,可以帮助跟车系统更加智能地进行跟车决策和路径规划,提高行车安全性、稳定性和效率。
20、在本发明的一个实例中,步骤s7包括:选择跟车车辆集中跟车率阈值最大的车辆进行跟车;将避让车辆集中最小纵向坐标大于跟车车辆的车辆剔除,对剩下的车辆进行侧偏避让。
21、与现有技术相比,采用该技术方案所达到的技术效果:通过选择跟车率阈值最大的车辆进行跟车,可以确保实现最大程度的安全跟车。同时,通过对危险车辆的避让,可以有效提高整体行车的安全性。这种策略不仅有助于保持跟车过程中的稳定性和安全性,还能有效降低潜在碰撞风险,从而提升跟车系统的整体性能和可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290708.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表