一种智能消防机器人及其灭火方法
- 国知局
- 2024-07-05 17:07:24
本发明涉及消防技术和智能控制,特别是一种利用声波进行灭火,并具有智能控制系统的机器人。
背景技术:
1、火灾是一种破坏性极强,对人民生命健康及财产安全造成严重威胁的一类灾害事故。当前社会经济发展迅速,造成火灾的因素也随之增加,致使火灾的发生率逐年增加,且危害程度愈发严重。
2、在灭火技术领域,传统方法包括使用水、泡沫、干粉等介质用于扑灭火焰。这些方法在特定条件下表现出色,但在某些情况下存在明显的局限性。水作为灭火介质可能无法应对电气火灾,因为其导电性可能引发更大的安全隐患。干粉虽然广泛应用,但其使用可能导致二次污染,并且在处理某些特殊化学物质的火灾时可能无法提供理想的灭火效果。
3、对于电气设备引发的火灾,传统灭火手段可能对设备和操作人员造成额外损害。而针对化学火灾,传统灭火方法可能无法迅速、有效地控制火势,因为不同的化学物质对不同灭火介质的反应各异。
4、因此,有必要探索更为创新和智能的灭火技术,以提高在多样化火灾场景下的灭火效果。本发明结合声波灭火技术,以应对传统方法难以解决的问题,从而为灭火领域引入一种更为灵活、智能的解决方案。本发明旨在提供一种全面适用于不同类型火灾的创新性灭火机器人系统。
技术实现思路
1、为了克服上述现有技术的不足,本发明的目的在于提供一种智能消防机器人及其灭火方法,旨在克服传统技术的局限性,提高火灾处理的效率和可靠性。
2、为了达到上述目的,本发明采用以下技术方案实现:
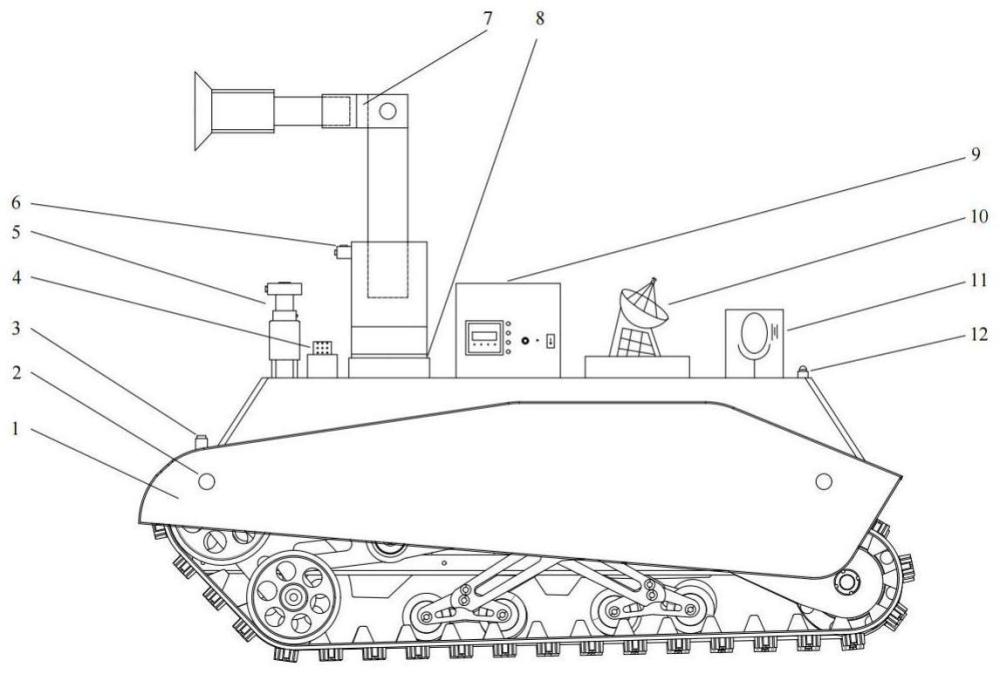
3、一种智能声波灭火机器人,包括机身(1)、声波发生器(9)、声波灭火器(7)、烟雾传感器(4)、红外热成像仪(5)、视觉传感器(6)、激光雷达(3)、避障传感器(2)、语音识别模块(11)、蜂窝通信(10)、控制系统(101)。
4、所述机器人主体具有克服复杂环境的功能,机器人主体使用履带(104)作为移动装置,电机(103)作为驱动装置,电源(102)作为动力来源;所述声波灭火器(7)能完成z方向转动和x方向俯仰转动、y方向移动和z方向移动;声波灭火器(7)前端为扬声器(705),中间部分由第一伸缩轴(703)、转轴(702)、第二伸缩轴(701)和转台(8)连接。
5、所述声波发生器(9)将电压信号转换为声音信号并由声波灭火器(7)和扬声器(705)输出。
6、所述控制系统(101)用于控制机器人主体的移动、避障,用于控制声波灭火器(7)的动作。
7、所述控制系统(101)包括主控单元,所述主控单元能够获取烟雾传感器(4)、视觉传感器(6)、避障传感器(2)、红外热成像仪(5)、激光雷达(3)的相应数据,并对数据进行处理确定火源位置以及避障。
8、所述定位火源并进行灭火的流程是:烟雾传感器(4)实时监测周围环境中的烟雾浓度,一旦探测到异常浓度高于预先设定的相应气体浓度阈值时,机器人默认附近产生了疑似火源,系统启动红外热成像仪(5)和视觉传感器(6),通过红外热成像仪(5)获取高分辨率的热图像,结合视觉传感器(6)的数据,精确定位火源的位置,控制系统根据激光雷达(3)扫描周围环境,创建高精度的地图,使机器人主体更快到达火源附近,控制系统(101)启动声波灭火器(7)进行灭火。
9、所述声波灭火器(7)灭火的原理是:
10、所述声波灭火利用声波传播过程中波峰与波谷的相互转换,影响火焰周围的氧气浓度、温度及压力等特性,使其燃烧平衡被打破,最终熄灭火焰;声波发生器连接电源(102),产生声波信号,根据功率调节器(13)调节频率,将声信号放大;声波信号向声波灭火器(7)聚集,扬声器(705)将声波发射出去,使空气中原本均匀分布的氧气呈疏密分布,降低火焰周围氧气浓度和温度,利用声波扰动产生的压强差迫使火焰与燃料分离,引发火焰的不稳定运动,最终使火焰熄灭。
11、本发明从传统灭火中水可能无法应对电气火灾,泡沫和干粉等介质其使用可能导致二次污染的原因出发,利用履带机器人的卓越越野性能和灵活性,结合声波灭火技术,使机器人能够在复杂环境中迅速移动,实现高效灭火。集成烟雾传感器(4)和智能决策系统,使机器人能够感知火源和烟雾分布,自主决策最优声波灭火策略,提高响应速度。结合红外热成像仪(5),提高火源定位的准确性,帮助机器人更有效地执行声波灭火任务。集成激光雷达(3)和避障传感器(2),使机器人能够自主避障,规划最佳路径,提高机器人在火场中的机动性。引入远程操作和监控系统,操作人员可以远程控制机器人,实时观察火场状况,灵活调整声波灭火策略。整合语音识别模块(11),使机器人能够理解和执行语音指令,提高用户与机器人的交互效率。
技术特征:1.一种智能消防机器人及其灭火方法,其特征在于:包括行驶模块、控制系统模块、灭火模块、语音识别模块;行驶模块由电源(102)、电机(103)和履带(104)组成,其中电源(102)作为动力来源,电机(103)作为驱动装置,履带(104)作为移动装置,以实现机器人在火场内的灵活行驶;控制系统模块(101)获取烟雾传感器(4)、视觉传感器(6)、避障传感器(2)、红外热成像仪(5)、激光雷达(3)的相应数据,并通过处理确定火源位置和避障信息;控制系统模块(101)还负责协调机器人主体(1)的移动、避障,并控制声波灭火器(7)的动作;灭火模块由声波发生器(9)和声波灭火器(7)组成,声波灭火器(7)能够完成z方向转动和x方向俯仰转动、y方向移动和z方向移动,前端为扬声器(705),中间部分由第一伸缩轴(703)、转轴(702)、第二伸缩轴(701)和转台(8)组成,以实现对火源的高效灭火;语音识别系统由语音识别模块(11)和蜂窝通信(10)组成,用于远程操作和监控系统,这使得操作人员可以通过语音指令对机器人进行远程控制,提高操作的便捷性和灵活性。
2.根据权利要求1所述的智能消防机器人,其特征在于控制系统模块(101)的处理算法通过机器学习实现,以不断优化对火场数据的处理和火源定位的准确性。
3.根据权利要求1所述的智能消防机器人,其特征在于电源(102)为可充电电池,以确保机器人在长时间作业中能够持续提供稳定的动力。
4.根据权利要求1所述的智能消防机器人,其特征在于避障传感器(2)采用超声波或激光等技术,以实现对障碍物的高效检测和避免碰撞。
5.根据权利要求1所述的智能消防机器人,其特征在于激光雷达(3)用于实现对火场内三维空间的精准扫描,以提高对火源位置的准确定位。
6.根据权利要求1所述的智能消防机器人,其特征在于语音识别模块(11)通过自然语言处理技术,能够识别多种语音指令,实现更复杂的远程控制和操作。
技术总结本发明涉及一种智能消防机器人及其灭火方法。其设计旨在应用于一种无污染灭火环境,提高灭火效率和操作智能性。该机器人由行驶模块、控制系统模块、灭火模块、语音识别模块组成,行驶模块能够在火场内灵活移动,快速响应并迅速到达火源位置。控制系统模块负责协调各个模块的工作,确保机器人高效地响应灭火任务。灭火模块配备了先进的声波灭火器,能够以高效、精确的方式对火源进行灭火。语音识别模块使该发明能够与操作人员进行有效的语音交互,提高操作的智能性。本发明实现了提高灭火效率,还减少了二次污染风险。这一发明在火灾扑救领域具有潜在的广泛应用,为灭火工作引入了更为智能和高效的解决方案。技术研发人员:莫丽,肖雄,陈超受保护的技术使用者:西南石油大学技术研发日:技术公布日:2024/3/24本文地址:https://www.jishuxx.com/zhuanli/20240617/46626.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。