一种便于运输的消防机器人的制作方法
- 国知局
- 2024-07-05 17:07:40
本技术涉及机器人,尤其涉及一种便于运输的消防机器人。
背景技术:
1、随着科技的不断发展,消防救灾已经被列为科学研究中的重要一项。消防机器人是特种机器人的一种,是可代替消防员从事特定消防作业的机器人。
2、目前,消防机器人到达火灾现场的途径是通过放置在拖车上进行托运的方式,由于消防机器人自身不带固定机构,则消防机器人在拖车上还需要使用绑带进行缠绕固定才能运输,这种方式操作不便捷且耗费时间,导致延长消防机器人到达火灾现场的时间,则火灾救援时效性不强。
技术实现思路
1、本实用新型旨在提供一种便于运输的消防机器人,以解决上述背景技术中提出的消防机器人到达火灾现场的途径是通过放置在拖车上进行托运的方式,由于消防机器人自身不带固定机构,则消防机器人在拖车上还需要使用绑带进行缠绕固定才能运输,这种方式操作不便捷且耗费时间,导致延长消防机器人到达火灾现场的时间,则火灾救援时效性不强的问题。
2、本实用新型解决技术问题所采用的技术方案如下:一种便于运输的消防机器人,包括机器人主体、转动部、挂环部、传动组件、滑动组件和伸缩气缸;所述转动部安装于所述机器人主体上;所述挂环部位于所述机器人主体的前端,且与所述转动部卡固连接;所述传动组件安装于所述机器人主体上,且与所述转动部传动连接;所述滑动组件升降连接于所述机器人主体的底部;所述伸缩气缸安装于所述机器人主体的底部,且与所述滑动组件传动连接。
3、在一些实施例中,所述转动部包括至少两个承转架和转动杆;两个所述承转架分布安装于所述机器人主体的底部前端;所述转动杆转动连接于两个所述承转架之间;所述转动杆与所述挂环部卡固连接,所述转动杆与所述传动组件传动连接。
4、在一些实施例中,所述挂环部包括连接架和环圈;所述连接架的一端卡固连接于所述转动杆;所述环圈与所述连接架的另一端一体连接。
5、在一些实施例中,所述传动组件包括电机、主齿轮、从齿轮和齿轮链;所述电机安装于所述机器人主体的底部;所述主齿轮与所述电机的输出端传动连接;所述从齿轮与所述转动杆卡固连接;所述齿轮链与所述主齿轮、从齿轮啮合连接。
6、在一些实施例中,所述滑动组件包括若干承转块、剪刀架、转动轴和若干滚轮;所述剪刀架的顶部一侧通过所述承转块与所述机器人主体的底部活动连接,所述剪刀架的顶部另一侧通过所述承转块在所述机器人主体底部开设的供滑槽内活动连接;所述转动轴安装于所述剪刀架顶部另一侧,所述转动轴与所述伸缩气缸的输出端传动连接;若干所述滚轮分布连接于所述剪刀架底部两侧。
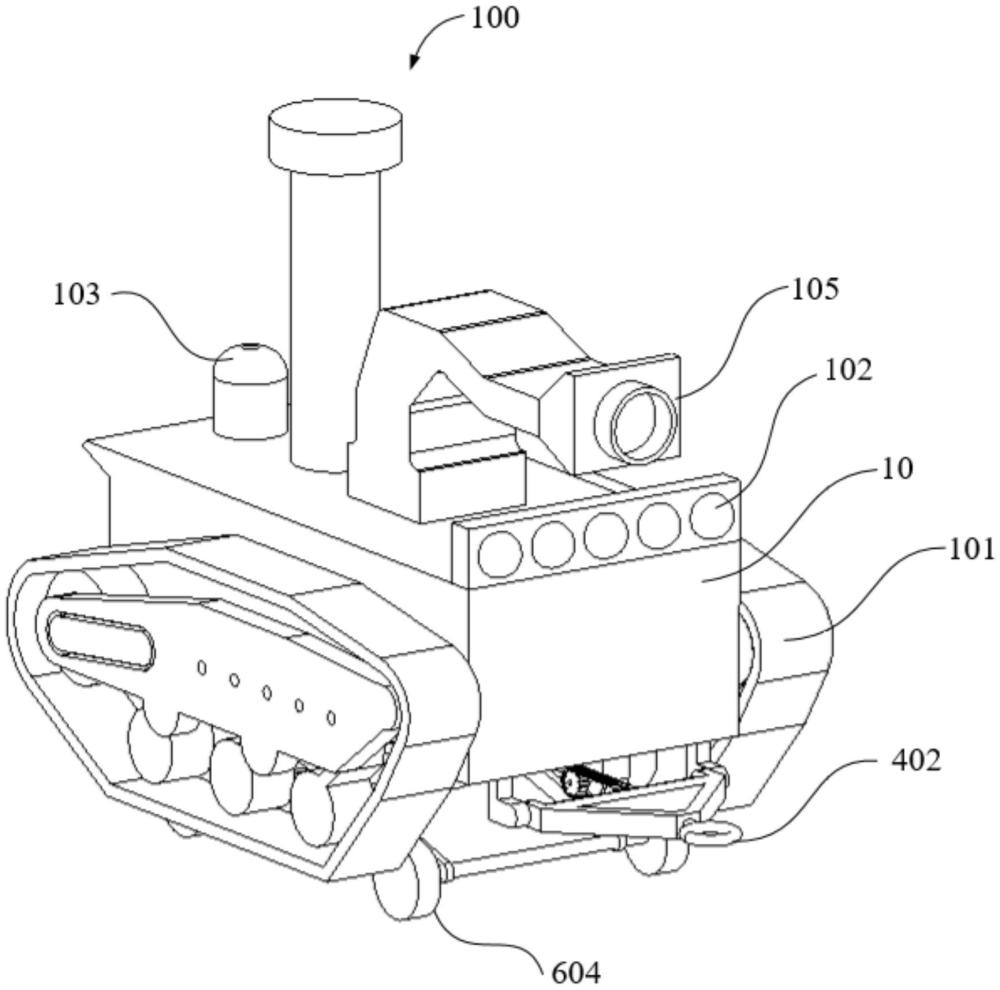
7、在一些实施例中,所述机器人主体上安装有集水接头和水炮,所述集水接头通过所述机器人主体内部的增压器与所述水炮连接,所述水炮位于所述机器人主体的顶部前端。
8、在一些实施例中,所述机器人主体的前端安装有照明灯。
9、在一些实施例中,所述机器人主体上安装有雷达。
10、在一些实施例中,所述机器人主体的两侧分别安装有履带轮。
11、在一些实施例中,所述便于运输的消防机器人还包括所述机器人主体中设置的电子控制系统和无线通讯单元,所述电子控制系统通过所述无线通讯单元信号连接有遥控器。
12、与现有技术相比,本实用新型的有益效果是:
13、本实用新型中,传动组件启动运行而传动转动部进行正或反向转动,传动部在被传动组件传动而正或反向转动过程中,转动部带动挂环部上或下移动进行调整位置,从而将挂环部调整至适合高度来与托车钩对准连接伸缩气缸进行启动运行。本实用新型中,伸缩气缸运行过程中传动滑动组件进行升或降,消防机器人需进行拖车拖动时,伸缩气缸传动滑动组件进行升起,从而滑动组件将机器人主体进行顶起,在机器人主体顶起被托动过程中,由滑动组件在机器人主体底部进行承滑。本实用新型能够自动调节挂环部的高度来与拖车对应连接,以及通过伸缩气缸传动滑动组件将机器人主体进行自动顶起,并由滑动组件在机器人主体的底部进行承滑,使得能够迅速将消防机器人与拖车对应连接进行拖去火灾现场,增强救援时效。
技术特征:1.一种便于运输的消防机器人(100),其特征在于,包括:
2.根据权利要求1所述的便于运输的消防机器人(100),其特征在于,所述转动部(30)包括:
3.根据权利要求2所述的便于运输的消防机器人(100),其特征在于,所述挂环部(40)包括:
4.根据权利要求2所述的便于运输的消防机器人(100),其特征在于,所述传动组件(20)包括:
5.根据权利要求1所述的便于运输的消防机器人(100),其特征在于,所述滑动组件(60)包括:
6.根据权利要求1所述的便于运输的消防机器人(100),其特征在于,所述机器人主体(10)上安装有集水接头(104)和水炮(105),所述集水接头(104)通过所述机器人主体(10)内部的增压器与所述水炮(105)连接,所述水炮(105)位于所述机器人主体(10)的顶部前端。
7.根据权利要求1所述的便于运输的消防机器人(100),其特征在于,所述机器人主体(10)的前端安装有照明灯(102)。
8.根据权利要求1所述的便于运输的消防机器人(100),其特征在于,所述机器人主体(10)上安装有雷达(103)。
9.根据权利要求1所述的便于运输的消防机器人(100),其特征在于,所述机器人主体(10)的两侧分别安装有履带轮(101)。
10.根据权利要求1所述的便于运输的消防机器人(100),其特征在于,还包括所述机器人主体(10)中设置的电子控制系统和无线通讯单元,所述电子控制系统通过所述无线通讯单元信号连接有遥控器。
技术总结本技术提供了一种便于运输的消防机器人,包括机器人主体、转动部、挂环部、传动组件、滑动组件和伸缩气缸;挂环部位于机器人主体的前端,且与转动部卡固连接;传动组件安装于机器人主体上,且与转动部传动连接;滑动组件升降连接于机器人主体的底部;伸缩气缸安装于机器人主体的底部,且与滑动组件传动连接。传动部在被传动组件传动而正或反向转动过程中,转动部带动挂环部上或下移动进行调整位置。本技术能够自动调节挂环部的高度来与拖车对应连接,以及通过伸缩气缸传动滑动组件将机器人主体进行自动顶起,并由滑动组件在机器人主体的底部进行承滑,使得能够迅速将消防机器人与拖车对应连接进行拖去火灾现场,增强救援时效。技术研发人员:莫坚文,黄金海,李吉星,满长福,房文金,张伟才,方冠鹏,张建华,曾财能,叶瑞生,张成岩,曾维健受保护的技术使用者:蛇口集装箱码头有限公司技术研发日:20230814技术公布日:2024/3/27本文地址:https://www.jishuxx.com/zhuanli/20240617/46650.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表