一种多功能磁吸爬壁消防机器人的制作方法
- 国知局
- 2024-07-05 17:37:25
本发明创造属于智能灭火救援装备,尤其是涉及一种多功能磁吸爬壁消防机器人。
背景技术:
1、现有技术中,虽然已有爬壁式的机器人产品,但功能较为单一,诸如cn202211294656.x提供了一种基于磁场强度测量的磁力自适应爬壁机器人,通过控制组件调节磁体与导磁壁面之间的气隙,进而调整爬壁机器人与壁面之间的磁吸力,提升爬壁机器人的自适应性,主要用于大型金属罐体、轮船壁面除锈、喷涂作业、巡检等,还有些是用于如水坝等大型构筑物检测、辅助维修等作业,这些机器人都无法直接应用于消防灭火,虽然专利cn201911372016.4通过定位法兰盘以及安装座内的卡爪实现壁面固定,并通过折臂式连接消防水枪与水管进行灭火救援,又如cn03134403.8采用吸盘和四组驱动装置结构实现在建筑外墙壁面攀爬灭火工作。但对于集装箱堆场区,密集堆垛,处于狭小空间内的集装箱火灾,目前尚没有针对性的爬壁消防机器人,且常规的举高喷射消防车或消防机器人,在不移动集装箱的情况下,无法针对着火集装箱进行有效灭火处置。
技术实现思路
1、有鉴于此,本发明创造旨在克服现有技术中的缺陷,提出一种可在狭小空间灵活穿行和作业的多功能磁吸爬壁消防机器人。
2、为达到上述目的,本发明创造的技术方案是这样实现的:
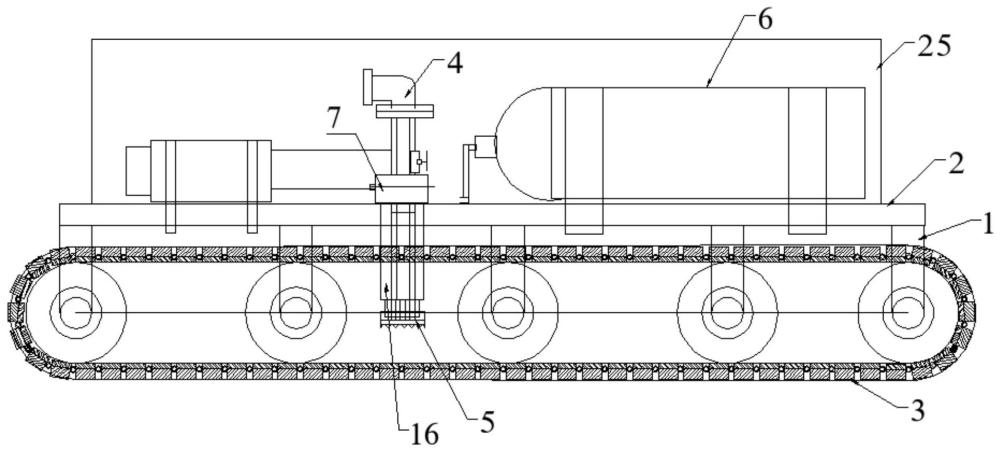
3、一种多功能磁吸爬壁消防机器人,包括安装于支撑悬架上的平台,支撑悬架下侧安装有磁吸附式履带行走装置,在平台上安装有灭火剂喷放管道、开孔装置、以及若干灭火剂储罐,灭火剂喷放管道竖直布置于平台,其下端安装有压力介质中转装置,所述压力介质中转装置包括汇入端盖和喷射端盖,汇入端盖上设有数个接入管,并在接入管上设有控制阀,喷射端盖下端设有排出管,并在排出管上螺纹安装有供液管,供液管下端设有喷射端管,在喷射端管与供液管间通过波纹管连接;所述开孔装置包括套装于供液管外侧的空心钻杆,并在空心钻杆下端设有中空的钻头,同时,灭火剂储罐与接入管连通;在空心钻杆侧壁上设有若干凹槽,凹槽内设有转销,在转销上安装有保持架,保持架两端分别设有质量不同的摩擦块和离心块,空心钻杆转动时,摩擦块与供液管间通过摩擦力传递驱动力,使供液管与钻头同步进给。
4、进一步,所述控制阀采用遥控电磁阀。
5、进一步,所述汇入端盖上设有第一连接法兰,喷射端盖上设有第二连接法兰,第一、二连接法兰间通过螺栓进行固定。
6、进一步,所述汇入端盖朝向喷射端盖侧的端面、以及喷射端盖朝向汇入端盖侧的端面,均设有凹槽,汇入端盖与喷射端盖扣装并密封固定后,在二者内部形成介质暂存腔。
7、进一步,磁吸附式履带行走装置的履带上镶嵌有磁块。
8、进一步,所述平台安装有防爆箱,在防爆箱内设有市电接入模块和备用电源模,备用电源模块包括锂电池。
9、进一步,所述防爆箱内设有驱动电机,该驱动电机为防爆电机,驱动电机的输出端安装有涡轮蜗杆减速器,并由蜗轮蜗杆减速器的输出端驱动空心钻杆转动。
10、进一步,所述喷射端管外壁设有若干探头。
11、进一步,所述灭火剂罐包括液氮储罐。
12、相对于现有技术,本发明创造具有以下优势:
13、本发明机器人灵活爬壁行进、定点吸附加载,集成破壁、探测及灭火处置多种功能,可在集装箱瓦楞形结构的壁面上稳定攀爬,磁场吸合力强劲、悬停加载磁场锁定牢固、开孔、探测、处置连续作业远程遥控高效快捷、使用效果好,灭火效率高。
技术特征:1.一种多功能磁吸爬壁消防机器人,其特征在于:包括安装于支撑悬架上的平台,支撑悬架下侧安装有磁吸附式履带行走装置,在平台上安装有灭火剂喷放管道、开孔装置、以及若干灭火剂储罐,灭火剂喷放管道竖直布置于平台,其下端安装有压力介质中转装置,所述压力介质中转装置包括汇入端盖和喷射端盖,汇入端盖上设有数个接入管,并在接入管上设有控制阀,喷射端盖下端设有排出管,并在排出管上螺纹安装有供液管,供液管下端设有喷射端管,在喷射端管与供液管间通过波纹管连接;所述开孔装置包括套装于供液管外侧的空心钻杆,并在空心钻杆下端设有中空的钻头,同时,灭火剂储罐与接入管连通;在空心钻杆侧壁上设有若干凹槽,凹槽内设有转销,在转销上安装有保持架,保持架上下两端分别设有质量不同的摩擦块和离心块,空心钻杆转动时,摩擦块与供液管间通过摩擦力传递驱动力,使供液管与钻头同步进给。
2.根据权利要求1所述的一种多功能磁吸爬壁消防机器人,其特征在于:所述控制阀采用遥控电磁阀。
3.根据权利要求1所述的一种多功能磁吸爬壁消防机器人,其特征在于:所述汇入端盖上设有第一连接法兰,喷射端盖上设有第二连接法兰,第一、二连接法兰间通过螺栓进行固定。
4.根据权利要求1所述的一种多功能磁吸爬壁消防机器人,其特征在于:所述汇入端盖朝向喷射端盖侧的端面、以及喷射端盖朝向汇入端盖侧的端面,均设有凹槽,汇入端盖与喷射端盖扣装并密封固定后,在二者内部形成介质暂存腔。
5.根据权利要求1所述的一种多功能磁吸爬壁消防机器人,其特征在于:磁吸附式履带行走装置的履带上镶嵌有磁块。
6.根据权利要求1所述的一种多功能磁吸爬壁消防机器人,其特征在于:所述平台安装有防爆箱,在防爆箱内设有市电接入模块和备用电源模,备用电源模块包括锂电池。
7.根据权利要求6所述的一种多功能磁吸爬壁消防机器人,其特征在于:所述防爆箱内设有驱动电机,该驱动电机的输出端安装有涡轮蜗杆减速器,并由蜗轮蜗杆减速器的输出端驱动空心钻杆转动。
8.根据权利要求1所述的一种多功能磁吸爬壁消防机器人,其特征在于:所述喷射端管外壁设有若干探头。
9.根据权利要求1所述的一种多功能磁吸爬壁消防机器人,其特征在于:所述灭火剂罐包括液氮储罐。
技术总结本发明创造提供了一种多功能磁吸爬壁消防机器人,包括平台,支撑悬架下侧安装有履带行走装置,平台上安装有灭火剂喷放管道、开孔装置及若干灭火剂储罐,灭火剂喷放管道下端安装有压力介质中转装置,其包括汇入端盖和喷射端盖,汇入端盖上设有数个接入管,喷射端盖下端设有排出管,排出管上螺纹安装有供液管,供液管下端设有喷射端管,喷射端管与供液管间有波纹管;开孔装置包括空心钻杆,空心钻杆下端设有中空的钻头;空心钻杆侧壁上设有若干凹槽,凹槽内设有转销,转销上安装有保持架,保持架上下两端分别设有质量不同的摩擦块和离心块。本发明机器人灵活爬壁行进、定点吸附加载,集成破壁、探测及灭火处置多种功能,使用效果好,灭火效率高。技术研发人员:刘晅亚,陈彦菲,李耀强,罗昊,王继赟,朱志强受保护的技术使用者:应急管理部天津消防研究所技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240617/48360.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表