一种用于火情智能处理的消防机器人的制作方法
- 国知局
- 2024-07-05 17:37:39
本发明涉及消防机器人,更具体地涉及一种用于火情智能处理的消防机器人。
背景技术:
1、火灾是指在时间或空间上失去控制的燃烧所造成的灾害,在发生火灾时,火场环境时具有高温、浓烟、毒气、爆炸、坍塌的极端危险,消防员在这样高度危险的环境中去灭火,十分危险,生命受到威胁,遇到重大火灾,火场浓烟,能见度非常低,难以确定火源位置点,难以接近火源,给消防人员救人、灭火造成不便,因不了解现场情况而有可能造成消防人员的伤亡,火场高温,不易靠近,有可能发生烧伤,火场有毒或有不明易燃易爆品,在扑救的过程中会发生突然爆炸,中毒,造成人员伤亡;建筑倒塌,火场中由于高温和燃烧会降低建筑构件的强度,发生建筑物坍塌,给深入建筑内部灭火、救人的消防人员造成困难或伤亡。
2、随着社会经济的迅速发展,人们的生活水平得到了显著的提升,在休闲时,大多选择逛街购物,因此商场的消防,为保护人们财产安全的重中之重,商场的消防大多选择分区进行,一旦商场发生火灾,通过消防门对商场进行分区,防止火灾的蔓延,造成更大的经济损失,后等待消防员的救助,但在消防员的救助过程中,仍存在以下问题:
3、1、对顾客来说,商场的环境较为复杂,在发生火灾时,消防门关闭,造成客户被困其中,无法及时的撤离,造成生命隐患,同时在火灾发生时,商场的复杂环境,加之易燃物较多的情况下,商场内部的监控大多因线路烧坏无法使用,增大消防员的救助时间,增加消防员的救助难度。
4、2、由于商场的占地面积较大,在发生火灾时,火场中发生大量的浓烟,受困者不能及时的寻找到水源,对口鼻进行防护,加上在火焰燃烧时,氧气会形成助燃剂,大量的浓烟与氧气的减少,使受困者呼吸越发困难,形成窒息,对受困人员形成生命威胁。
技术实现思路
1、鉴于现有技术存在的火场现场环境复杂,增加救援的难度及在等待救援中,火场中烟气造成被困人员窒息的问题,提出了一种用于火情智能处理的消防机器人。
2、本技术提供了一种用于火情智能处理的消防机器人,其目的在于:对火场内部的环境进行检测,对内部的火源进行灭火的同时对火场中的受困人员进行搜救,以及在搜索到受困人员时,对受困人员发送呼吸面罩,防止受困人员受到烟气的影响产生窒息,并将受困人员送到安全通道。
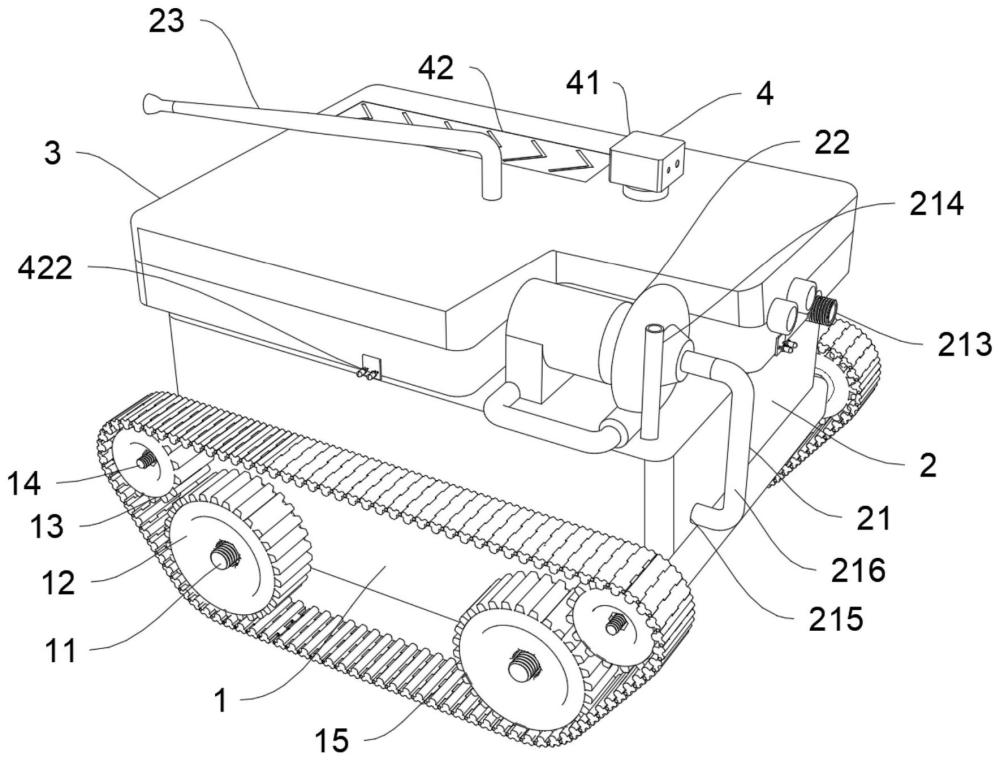
3、本发明的技术方案为:一种用于火情智能处理的消防机器人,包括底盘,还包括:设置于底盘顶端的防火单元,设置于防火单元顶端的防护单元,以及设置于防护单元顶端的检测单元;
4、所述防火单元包括设置于底盘顶端的储水部件,设置于储水部件顶端的输送部件,设置于输送部件一端的出水部件;所述储水部件包括设置于底盘顶端的储水箱,所述储水箱的内部开设有储水空间,所述储水箱顶端的一侧设有进水口,所述储水箱顶端远离进水口的一侧设有水量容积显示,所述储水箱的一侧设有出水槽,所述出水槽的内部设有出水管,所述储水箱的顶端设有支撑柱。
5、采用上述技术方案,进水口的外壁为螺纹状的,可连接加水带,同时也可以在对储水空间的内部添加满消防用水后,取下加水带后关闭进水口,防止储水空间内部的存水溢出,水量容积显示可对储水空间内部的水量多少进行检测,出水管与出水槽固定连接,出水管可进行更换,支撑柱呈三乘三的阵列方式布局在储水箱的顶端对防护壳进行支撑,使消防机器人的整体性更好,更加的稳定。
6、进一步的,所述输送部件包括设置于出水管顶端的连通管,所述连通管的远离出水管的一端设有加压器,所述加压器远离连通管的一端设有工作电机,所述工作电机的底端设有支撑块,所述加压器底端的一侧设有出水口,所述出水口的内部设有输送管。
7、采用上述技术方案,支撑块固定在储水箱的顶端,输送管卡接在出水口的内部,加压器的底端固定连接在连通管的顶端,使加压器在进行工作时,稳定性更好,工作电机与支撑块固定连接,加压器与工作电机固定连接,使加压器与工作电机在工作时,更加的稳定,工作效果更好,输送管贯穿支撑块的底端且固定连接。
8、进一步的,所述出水部件包括设置于输送管顶端的连通转管,所述连通转管顶端的内部设有喷水管,所述喷水管底端的外壁上设有辅转动轮,所述辅转动轮的外壁啮合连接有主动转轮,所述主动转轮底端的中部设有转动电机,所述喷水管的形状为l形,所述喷水管远离连通转管的一端设有喷水口。
9、采用上述技术方案,转动电机控制主动转轮进行转动,主动转轮带动辅转动轮转动,辅转动轮与喷水管固定连接,连通转管与输送管固定连接,喷水管活动卡接在连通转管的内部,喷水管在连通转管的内部转动时,连通转管为固定不动的,喷水口的内部可变换出水状态,可形成水幕或远距离喷洒的灭火水柱,根据使用情况进行相应的变化,在进水口连接水带持续加水时,喷水口为可远距离喷洒的灭火水柱,对火场进行持续的灭火,在进水口未连接水带需要通过储水空间内部的存水使用时,喷水口喷洒的水形成水幕形状,使消防机器人在火场中检测火场情况及受困人员时,对受困人员的周围进行防护,对受困人员的防护性更好,对受困人员周围灭火的同时寻找安全通道。
10、进一步的,所述防护单元包括设置于储水部件顶端的控制部件,设置于控制部件一侧的伸缩部件,以及设置于伸缩部件内部的呼吸部件;控制部件包括设置于支撑柱顶端的防护壳,所述防护壳的内部开设有放置空间,所述放置空间的一侧设有防护板,所述防护板的内部设有防护空间,所述转动电机设置在防护板顶端的一侧,所述防护空间靠近出水口的一侧开设有连通槽,所述连通槽的内部设有输送管,所述防护板的内部设有控制器。
11、采用上述技术方案,防护板对放置空间的空间进行分隔,同时对控制部件进行防护,使消防机器人的反应速度更加的迅速,提高消防机器人的灭火性能,通过防护板的包裹,使控制器的防护性能得到进一步的提升,使消防机器人的系统安全性更高,防护板的顶端固定连接转动电机,转动电机电性连接控制器,连通槽的内部有密封件,通过密封件对输送管与连通槽之间的连接进行防护,使控制器的防护性能得到提升。
12、进一步的,所述伸缩部件包括设置于储水箱顶端的供电器,所述供电器的一端设有供电管,所述供电管的顶端贯穿防护壳并设置在放置空间内,所述供电管的顶端设有电驱滑块,所述电驱滑块的底端设有滑动条,所述电驱滑块的顶端设有刀形储存盒,所述刀形储存盒的一侧设有分隔条,所述分隔条远离刀形储存盒的一侧设有矩形储存盒,所述刀形储存盒与分隔条的内部均设有分料格,所述防护壳的顶端连接有四条滑动条,滑动条上滑动设有电驱滑块,电驱滑块连接在对应的刀形储存盒与矩形储存盒的底端,所述供电器电性连接有控制器,所述控制器上连接有语音装置。
13、采用上述技术方案,供电器设置在储水箱与防护壳之间,供电器固定在储水箱上,供电管对每一个电驱滑块电性连接,通过控制器传递命令到供电器,通过供电管将信号传递给电驱滑块,在供电管接收到命令后,电驱滑块带动刀形储存盒或矩形储存盒进行滑动,电驱滑块为前后两个,使刀形储存盒或矩形储存盒在滑动时更加的稳定,在前端的电驱滑块到达滑动条的一端后进行限位停止,另一个电驱滑块继续带动刀形储存盒或矩形储存盒进行滑动,使刀形储存盒或矩形储存盒在移动时更加的稳定和流畅,分料格的分隔使呼吸部件的存放更加整洁,拿取更加的方便,不会产生内部的混乱,从而影响刀形储存盒或矩形储存盒的开关,在消防机器人检测到受困人员时,消防机器人运行到受困人员地方,通过喷水口对周围的火源进行灭火,在消防机器人控制部件的控制下,使机器人在距离受困人员半米的范围内停下,控制器控制供电器工作,在供电器工作时,通过供电管对电驱滑块供电,使得电驱滑块在滑动条上滑动,在电驱滑块滑动时带动刀形储存盒或矩形储存盒打开。
14、进一步的,所述呼吸部件包括设置于分料格内部的面罩,所述面罩的两侧对称设有卡接块,所述卡接块的内部设有固定绳,所述固定绳的底端设有连接件,所述面罩的中部设有外部防护件,所述外部防护件的顶端设有内部防护件,所述内部防护件的顶端设有外层过滤网,所述外层过滤网的底端与外部防护件的顶端相互卡接。
15、采用上述技术方案,面罩为透明的,面罩可包裹住人体的脸部,两端的固定绳通过连接件进行卡接,从而使面罩固定在人体的脸部,防止火源对人体的面部进行烧伤,对眼睛造成伤害,通过外层过滤网对外部环境进行粗滤,后通过内部防护件对环境中的烟雾及危害气体进行过滤后,内部防护件可以为活性炭,将过滤后的气体通过外部防护件再次进行过滤后,外部防护件可以为滤烟膜,吸入口鼻,使受困人员的生命得到保障,通过三层过滤,将火场环境中的烟气及有害物质进行过滤,对火场中受困人员的呼吸进行防护,使受困人员的呼吸得到一定的保障,受困人员不会产生窒息的情况。
16、进一步的,所述检测单元包括设置于控制部件顶端一侧的监测部件,以及设置于控制部件上的显示部件;所述监测部件包括设置于防护壳顶端的转动器,所述转动器的顶端固定连接有连接垫片,所述连接垫片的顶端固定连接有相机外壳,所述相机外壳的一侧设有热成像传感器,所述热成像传感器的一侧设有摄像头,所述摄像头设置在相机外壳内,所述监测部件电性连接有控制器。
17、采用上述技术方案,转动器为转动的,通过热成像传感器对火场中的环境及受困人员进行检测,在热成像传感器检测的同时通过摄像头进行拍摄实时视频,后将摄像头拍摄的视频通过控制器传递到控制人员的控制装置上,经过双重的检测防止热成像传感器误检测,提高消防机器人检测的精准度,同时提高消防机器人的救援效率,缓解消防人员的不足,未能及时的救助受困人员。
18、进一步的,所述显示部件包括设置于防护壳顶端一侧的闪烁箭头,所述防护壳四面的中部均设有显示灯,所述显示灯电性连接控制器,所述闪烁箭头电性连接控制器,所述防护壳的一端设有障碍成像器,所述障碍成像器电性连接控制器。
19、采用上述技术方案,在使用消防机器人时,通过障碍成像器对火场内设置的安全路线提示进行检测,在消防机器人对受困人员发放完呼吸部件后,通过控制器内置的语音装置,与受困人员进行通话,确定受困人员情况及受困部位的火情,提醒受困人员跟随机器人移动到安全位置,消防机器人带领受困人员转移时,通过闪烁箭头的箭头提示受困人员行进的方向,使受困人员可以轻松的跟随消防机器人进行转移,如现场有人受伤无法行动,受困人员通过语音装置与消防人员沟通,使消防人员可以及时的展开救援,减少消防人员的搜救时间,提高消防灭火以及救援效率,在消防机器人使用时,消防机器人四边的显示灯不间断的进行闪烁,用来提醒受困人员,搜救设备的位置,使受困人员可以有效的跟随消防机器人,到达安全位置。
20、进一步的,所述底盘两端的两侧均对称设有转动轴,所述转动轴的外壁设有行进轮,所述行进轮的外壁啮合连接有辅助轮,所述辅助轮的内部设有连接轴,所述连接轴设置在转动轴内,所述辅助轮和行进轮的外壁共同啮合连接有行动链盘,所述行动链盘内壁的两端均啮合连接有行进轮与辅助轮,所述底盘内部的四角均设有驱动装置,所述转动轴贯穿底盘与驱动装置相互连接。
21、采用上述技术方案,通过驱动装置使转动轴带动行进轮转动,在行进轮转动时带动辅助轮转动,在行进轮与辅助轮转动时带动行动链盘转动,在行动链盘转动时,带动消防机器人进行移动,设置的行动链盘使消防机器人在面对复杂的环境时,移动的更加平顺稳定,使消防机器人在救援中更加的稳定和精准,消防机器人的工作时间更加的持久连贯。
22、本发明的技术效果和优点:
23、1.通过防火单元在机器人对受困人员进行搜救时,对内部的火源进行喷水,同时对未燃烧的物体进行喷水,减缓燃烧的速度,同时对受困人员进行喷洒水幕降低受困人员的体温,在连接水带时,机器人可以在距离火源燃烧点较近的距离对火源的根部进行喷水,增加灭火速度的同时降低水源的消耗。
24、2.通过防护单元在消防机器人使用时,对消防机器人内部的元件进行防护,同时在消防机器人遇到受困人员时,对受困人员发放呼吸部件,防止受困人员因烟雾产生窒息,延长受困人员的生命活力,同时,现场的受困人员可与外部的救援人员沟通火场内部情况,提高救援效率。
25、3.通过检测单元的双重检测,使机器人在对火场受困人员检测时,更加的精准,不会产生误判定的情况,提高救援效率的同时将现场内部情况的画面实时传输给救援人员,提高消防灭火以及救援效率。
本文地址:https://www.jishuxx.com/zhuanli/20240617/48392.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表