基于传感器动作检测的快换装置及方法
- 国知局
- 2024-07-05 17:55:34
本发明涉及机器人末端工具自动换接,特别是一种基于传感器动作检测的快换装置及方法。
背景技术:
1、近年来,随着早期核电站服役到达年限,各国已经着手关闭军用及民用核电站,由此带来的核设施退役问题也显露出来。随着退役工作的深入开展,相当一部分退役工作难点集中在辐射水平高,空间受限的工作场所,如退役过程中常涉及的“0”平面以下设备室。
2、基于上述的背景,设计并制造核退役机器人对各类设备进行拆解,以避免人员直接进入场地受到辐射具有十分重要的意义。在核退役的实际操作中,往往需要一台核退役机器人进行多种作业,则需要相应的匹配多种的末端工具,例如铲斗、液压剪、液压钳、液压锤等。现有若干种类的快换装置已经能够实现机器人末端工具自动换装,例如公告号为cn112091944a的发明专利“机器人末端工具分离对接装置及分离对接方法”、公告号为cn211615675u的发明专利“机器人末端工具快速换接装置”以及公告号为cn110919682a的发明专利“机器人末端执行器快速换接装置及换接方法”。
3、在现有快换装置的基础上,如何提升其工作过程的稳定性和可靠性是当前主要的研究方向。
技术实现思路
1、本发明的目的是克服现有技术的不足,而提供一种基于传感器动作检测的快换装置及方法,它能够实现核退役机器人末端工具的自动换装,并且相比现有的快换装置具有更好的稳定性和可靠性。
2、本发明的技术方案是:基于传感器动作检测的快换装置,包括公装配体和母装配体;
3、公装配体包括机架a、上销轴、公头基座、下销轴和公接头;机架a一侧设有用于连接末端工具的工具连接面,机架a另一侧设有间隔固设有两块相对布置的耳板a;上销轴两端分别与两块耳板a的上端固定连接并位于两块耳板a之间,上销轴的两端分别设有勾接段;公头基座固定安装在下销轴中部;下销轴两端分别与两块耳板a的下端固定连接并位于两块耳板a之间,下销轴的两端分别设有锁定段;多个公接头固定安装在公头基座上;
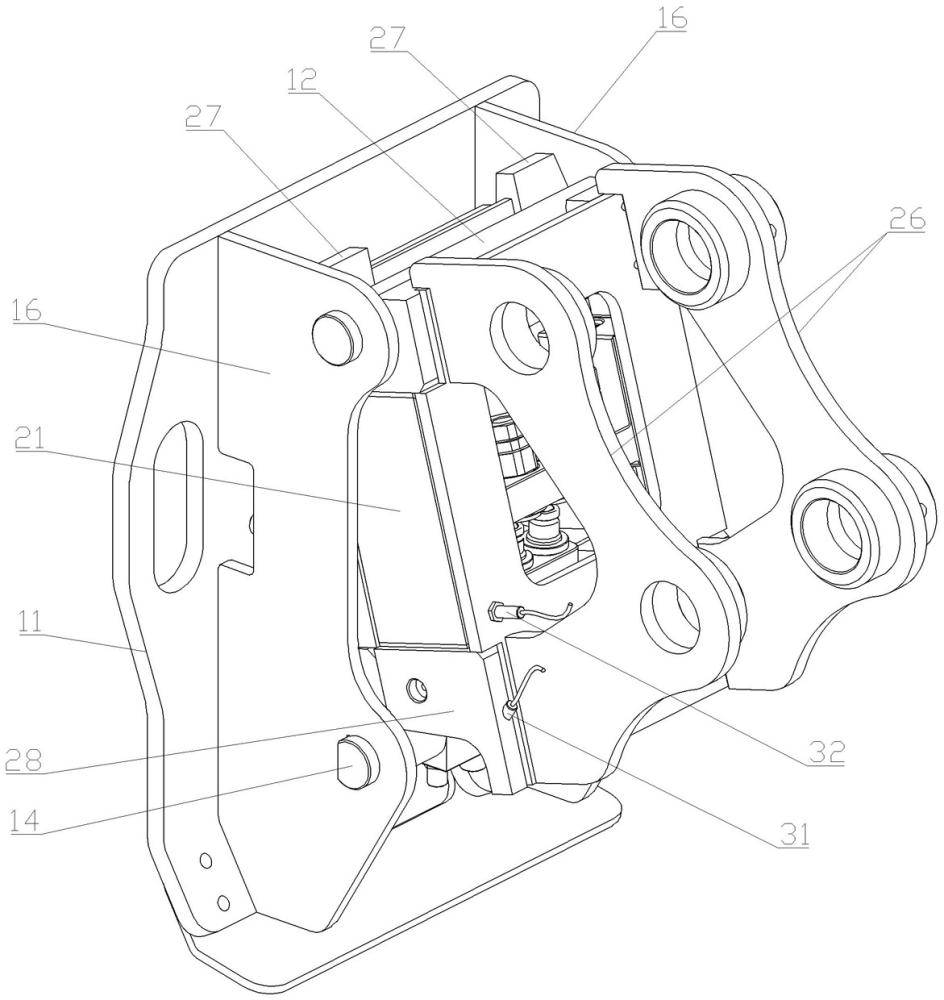
4、母装配体包括机架b、液压缸、母头基座、锁定杆和母接头;机架b后侧间隔固设有两块相对布置的耳板b,机架b前侧的上端间隔固设有两块相对布置的勾槽,勾槽内设有用于勾接上销轴勾接段的u形缺口,机架b前侧的下端间隔固设有两块相对布置的锁块,锁块上设有凹弧面和穿杆孔;液压缸固定安装在机架b前侧中部,其伸缩杆朝向机架b前侧下部伸出;母头基座中部设有连接段,其在连接段的中部与液压缸的伸缩杆固定连接;两根锁定杆的上端分别固定连接在母头基座的两侧下端,两根锁定杆的下端分别与两个锁块的穿杆孔活动插接,在液压缸的驱动下,两根锁定杆的下端同步缩回或同步伸出对应锁块的穿杆孔,当锁定杆的下端从对应锁块的穿杆孔伸出时,锁定杆的下端与锁块的凹弧面共同用于锁定下销轴的锁定段;多个母接头固定安装在母头基座的连接段上。
5、本发明进一步的技术方案是:当公装配体与母装配体连接为一体时:公接头与母接头相互插接,勾槽通过u形缺口勾住上销轴的勾接段,锁定杆下端从对应锁块的穿杆孔伸出,锁定杆下端与锁块凹弧面共同锁定下销轴锁定段。
6、本发明进一步的技术方案是:基于传感器动作检测的快换装置还包括传感器检测组件;传感器检测组件包括接近传感器a、接近传感器b、状态指示灯、电液比例阀和控制器;接近传感器a嵌入安装在锁块的凹弧面下方,其用于检测下销轴的锁定段是否贴紧锁块的凹弧面;接近传感器b嵌入安装在机架b中,其用于检测母头基座是否抵达移动行程的下端;状态指示灯直接或间接固定安装在机架b上;电液比例阀安装在液压缸的液压油路上,其用于控制液压缸的伸缩杆动作;控制器的输出端口分别与状态指示灯和电液比例阀电连接,控制器的输入端口分别与接近传感器a和接近传感器b电连接。
7、本发明进一步的技术方案是:母头基座在连接段的两侧分别设有导向段,导向段上设有导向孔;母装配体还包括导向组件;导向组件包括直线轴承、导杆和外侧护板;两个直线轴承分别固定安装在母头基座的两个导向孔中;两条导杆的上端分别固接在两个勾槽的下端,两条导杆的下端分别与两个直线轴承活动插接并分别伸入母头基座的两个导向孔中;两片外侧护板分别固定连接在机架b的两侧并分别与母头基座的两个导向段的侧壁面形成滑动接触。
8、本发明进一步的技术方案是:上销轴的勾接段与下销轴的锁定段上下相对并长度一致。
9、本发明进一步的技术方案是:公接头包括液压公接头和/或电气公接头和/或气路公接头,母接头包括液压母接头和/或电气母接头和/或气路母接头;液压公接头与液压母接头相匹配,电气公接头与电气母接头相匹配,气路公接头与气路母接头相匹配。
10、本发明的技术方案是:一种机器人末端工具快速换接方法,应用于基于传感器动作检测的快换装置,包括对接过程和拆卸过程;
11、在进行快速换接之前,需要执行以下预备工作:
12、a、母装配体的两块耳板b分别通过销轴连接在机器人的机械臂末端,并将母接头连通至液压系统或气路系统或电路系统;
13、b、先将末端工具连接在公装配体的工具连接面上,再将公装配体放置在地面或台面上;
14、上述预备工作中,a、b分步骤不分先后次序;
15、对接过程如下:
16、s01,公装配体与母装配体相互勾接:
17、控制机械臂的位姿,使母装配体的两个勾槽分别通过u形缺口勾住公装配体的上销轴的两处勾接段,控制机械臂的位姿,一方面使公装配体脱离地面,一方面使公装配体在自重作用下绕上销轴转动至贴合母装配体;公装配体与母装配体贴合时,公装配体的下销轴的两处锁定段分别压在母装配体的锁块的两处凹弧面上;
18、本步骤中,下销轴的锁定段是否贴紧锁块的凹弧面由接近传感器a来检测;若未贴紧,则接近传感器a不被触发,则状态指示灯不亮并且不执行后续操作,待操作人员来排除故障;若已贴紧,则接近传感器a被触发并立即发送电信号给控制器,控制器先控制状态指示灯闪烁若干次,表示公装配体与母装配体已经贴合,控制器再控制后续操作执行;
19、s02,公装配体与母装配体相互锁定:
20、控制器控制电液比例阀动作,使液压缸的活塞杆伸出,液压缸的活塞杆带动母头基座在两根导杆的导向作用下向下移动,进而带动连接在母头基座下端的两根锁定杆分别从对应锁块的穿杆孔中伸出,进而通过锁定杆下端与锁块凹弧面共同锁定下销轴;
21、本步骤中,液压缸的活塞杆是否伸出到位由接近传感器b来检测,若伸出到位,则母头基座会触发接近传感器b,接近传感器b随即发送电信号给控制器,由控制器控制状态指示灯常亮,表示公装配体与母装配体完成锁定;若未伸出到位,则接近传感器b不会被触发,则状态指示灯不亮,待操作人员来排除故障;
22、拆卸过程如下:
23、s01,公装配体与母装配体解除锁定:
24、控制机械臂的位姿,使公装配体接触地面,控制器控制电液比例阀动作,使液压缸的活塞杆缩回,液压缸的活塞杆带动母头基座在两根导杆的导向作用下向上移动,进而带动连接在母头基座下端的两根锁定杆分别缩回对应锁块的穿杆孔中,进而解除下销轴的锁定状态;
25、s02,公装配体与母装配体相互分离:
26、控制机械臂的位姿,使公装配体与母装配体在下端相互分离,此时,公装配体仅通过上销轴与母装配体的勾槽勾接,控制机械臂的位姿,使母装配体的勾槽与公装配体的上销轴相互分离,此时,完成了公装配体与母装配体的分离过程;
27、本步骤中,公装配体与母装配体在下端相互分离后,接近传感器a由触发状态变为未触发状态,控制器在接近传感器a状态变化的3秒后,控制状态指示灯闪烁数次,表示公装配体与母装配体在下端已相互分离,操作人员看到状态指示灯亮后再行后续的勾槽与上销轴分离操作。
28、本发明与现有技术相比具有如下优点:
29、基于两个接近传感器对特定部件位置的检测,对公装配体与母装配体的对接或分离过程进行监控,在分离或对接过程发生意外情况时触发报警,提醒操作人员前来处理,提升了快换装置的稳定性和可靠性。
30、以下结合图和实施例对本发明作进一步描述。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49715.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。