一种机器人视觉传感器
- 国知局
- 2024-07-08 10:44:39
本技术涉及图像获取,具体为一种机器人视觉传感器。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,随着科技的发展,机器人愈发趋向于人工智能化。
2、视觉传感器作为整个机器视觉系统信息的直接来源,能够获取足够的机器视觉系统要处理的最原始图像,是智能机器人对周围进行视觉感知的重要部件,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助设备,然而,对于目前机器人所配备的视觉传感器,为了获得更大的视觉感知范围,其视觉传感器普遍具备旋转调节功能,通过视觉传感器的旋转调整,获取周围的图样信息,扩大视觉感知范围,但是,机器人在作业或移动执行任务过程中,不仅仅需要获取周围的图像信息,还需要获取上方和下方区域的图像信息,而市面上现有的视觉传感器自身图像获取范围有限,仅依靠视觉传感器的旋转,以难以满足机器人的视觉感知范围需求,为此,本申请提出一种机器人视觉传感器。
技术实现思路
1、本实用新型的目的在于提供一种机器人视觉传感器,具备旋转调整和仰俯角度调整功能,能够全方位的获取机器人周侧图像信息,视觉面更广。
2、为实现上述目的,本实用新型提供如下技术方案:
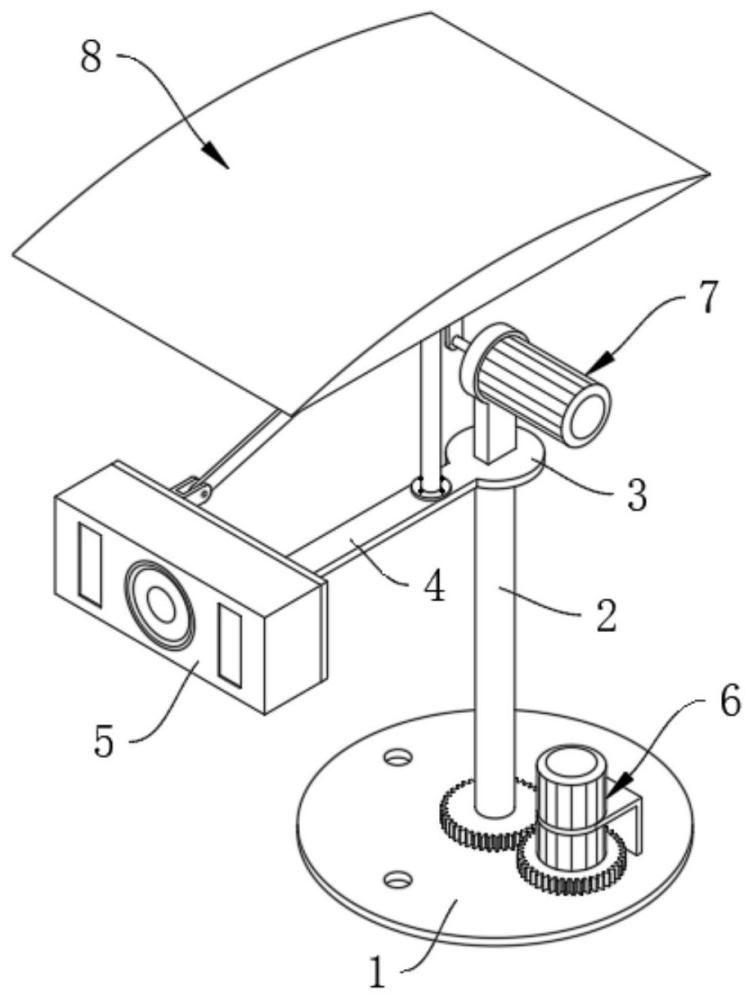
3、一种机器人视觉传感器,包括安装座,所述安装座上竖直旋转安装有支撑柱,所述支撑柱顶端固定有顶板,所述顶板侧壁上径向固定有支臂,所述支臂远离顶板的一端安装有视觉传感器本体;所述顶板上设置有用于驱使视觉传感器本体仰俯调节的仰俯调节机构,所述安装座上设置有用于驱动支撑柱旋转的旋转调节机构,所述支臂上设置有用于对视觉传感器本体顶部遮护的遮护机构。
4、优选的,所述视觉传感器本体底部与支臂铰接,所述仰俯调节机构包括固定安装在顶板上的第二电机,所述第二电机的输出轴上径向固定连接有主动臂,所述主动臂的端部铰接有从动臂,所述从动臂远离主动臂的一端与视觉传感器本体顶部铰接。
5、优选的,所述第二电机上固定套装有固定套板,所述第二电机通过固定套板固定安装在顶板上。
6、优选的,所述旋转调节机构包括固定套设在支撑柱底端处的从动齿轮以及旋转安装在安装座上表面的驱动齿轮,所述驱动齿轮和从动齿轮啮合,所述安装座上安装有用于驱动驱动齿轮旋转的第一电机。
7、优选的,所述遮护机构包括设置在视觉传感器本体上方的遮护顶罩以及用于支撑遮护顶罩的支撑件,所述支撑件安装在支臂上,所述遮护顶罩上表面设置为圆弧状结构。
8、优选的,所述支撑件包括竖直固定在支臂上的支撑管以及活动穿设在支撑管顶端的支撑杆,所述支撑杆顶端与遮护顶罩固定连接,所述支撑杆伸入支撑管内的一端固定有挡块,所述挡块与支撑管内部底壁之间设置有弹簧。
9、优选的,所述支撑管顶端螺纹连接有端盖,所述支撑管的底端和支撑杆的顶端均设置有连接板。
10、与现有技术相比,本实用新型的有益效果如下:
11、本实用新型通过旋转调节机构的设置,在将安装座装配在机器人上后,启动第一电机带动驱动齿轮旋转,驱动齿轮驱使从动齿轮带动支撑柱旋转,顶板和支臂与支撑柱同步旋转,由此带动视觉传感器本体旋转调整图像获取方向,可实现三百六十度的图像获取。
12、本实用新型通过仰俯调节机构的设置,启动第二电机带动主动臂旋转,主动臂带动从动臂摆动,利用视觉传感器本体底部和顶部分别与支臂和从动臂的铰接,从动臂摆动过程中牵引视觉传感器本体进行仰俯角度调整,由此来获取不同仰俯角度对应的图像信息,配合视觉传感器本体旋转调整图像获取方向,能够全方位的获取机器人周侧图像信息,视觉面更广。
13、本实用新型通过遮护机构的设置,利用弹簧对支撑杆的弹性支撑,使得遮护顶罩具有一定的弹性缓冲能力,进而能够对视觉传感器本体顶部起到一定的遮挡防护效果,尽可能的降低视觉传感器本体因碰撞造成的损伤,提高安全性。
14、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:1.一种机器人视觉传感器,其特征在于,包括:
2.根据权利要求1所述的一种机器人视觉传感器,其特征在于:所述视觉传感器本体(5)底部与支臂(4)铰接,所述仰俯调节机构(7)包括固定安装在顶板(3)上的第二电机(12),所述第二电机(12)的输出轴上径向固定连接有主动臂(14),所述主动臂(14)的端部铰接有从动臂(15),所述从动臂(15)远离主动臂(14)的一端与视觉传感器本体(5)顶部铰接。
3.根据权利要求2所述的一种机器人视觉传感器,其特征在于:所述第二电机(12)上固定套装有固定套板(13),所述第二电机(12)通过固定套板(13)固定安装在顶板(3)上。
4.根据权利要求1所述的一种机器人视觉传感器,其特征在于:所述旋转调节机构(6)包括固定套设在支撑柱(2)底端处的从动齿轮(9)以及旋转安装在安装座(1)上表面的驱动齿轮(10),所述驱动齿轮(10)和从动齿轮(9)啮合,所述安装座(1)上安装有用于驱动驱动齿轮(10)旋转的第一电机(11)。
5.根据权利要求1所述的一种机器人视觉传感器,其特征在于:所述遮护机构(8)包括设置在视觉传感器本体(5)上方的遮护顶罩(17)以及用于支撑遮护顶罩(17)的支撑件(16),所述支撑件(16)安装在支臂(4)上,所述遮护顶罩(17)上表面设置为圆弧状结构。
6.根据权利要求5所述的一种机器人视觉传感器,其特征在于:所述支撑件(16)包括竖直固定在支臂(4)上的支撑管(18)以及活动穿设在支撑管(18)顶端的支撑杆(19),所述支撑杆(19)顶端与遮护顶罩(17)固定连接,所述支撑杆(19)伸入支撑管(18)内的一端固定有挡块(20),所述挡块(20)与支撑管(18)内部底壁之间设置有弹簧(21)。
7.根据权利要求6所述的一种机器人视觉传感器,其特征在于:所述支撑管(18)顶端螺纹连接有端盖(22),所述支撑管(18)的底端和支撑杆(19)的顶端均设置有连接板(23)。
技术总结本技术公开了一种机器人视觉传感器,包括安装座,所述安装座上竖直旋转安装有支撑柱,所述支撑柱顶端固定有顶板,所述顶板侧壁上径向固定有支臂,所述支臂远离顶板的一端安装有视觉传感器本体;所述顶板上设置有用于驱使视觉传感器本体仰俯调节的仰俯调节机构,所述安装座上设置有用于驱动支撑柱旋转的旋转调节机构,所述支臂上设置有用于对视觉传感器本体顶部遮护的遮护机构;所述视觉传感器本体底部与支臂铰接,所述仰俯调节机构包括固定安装在顶板上的第二电机,所述第二电机的输出轴上径向固定连接有主动臂。本技术具备旋转调整和仰俯角度调整功能,能够全方位的获取机器人周侧图像信息,视觉面更广。技术研发人员:武丽云,张孝正,曹宇倩受保护的技术使用者:太原工业学院技术研发日:20231024技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50058.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表