一种旋转夹持装置及工业机器人的制作方法
- 国知局
- 2024-07-08 11:12:06
本技术涉及电动夹爪,尤其涉及一种旋转夹持装置及工业机器人。
背景技术:
1、工业领域中,夹爪是一种通用的工具,在各种自动化设备上的使用已经非常广泛。动力来源可分为气动和电动两大类,气动夹爪涉及到气体供应、控制不准确、相应零部件众多等,使用比较复杂。而电动夹爪的集成度高,使用简便,相较于气动夹爪,优势非常明显。
技术实现思路
1、本实用新型提供了一种旋转夹持装置及工业机器人,该旋转夹持装置具有结构简单,整体小型化。
2、本实用新型采用的技术方案是:
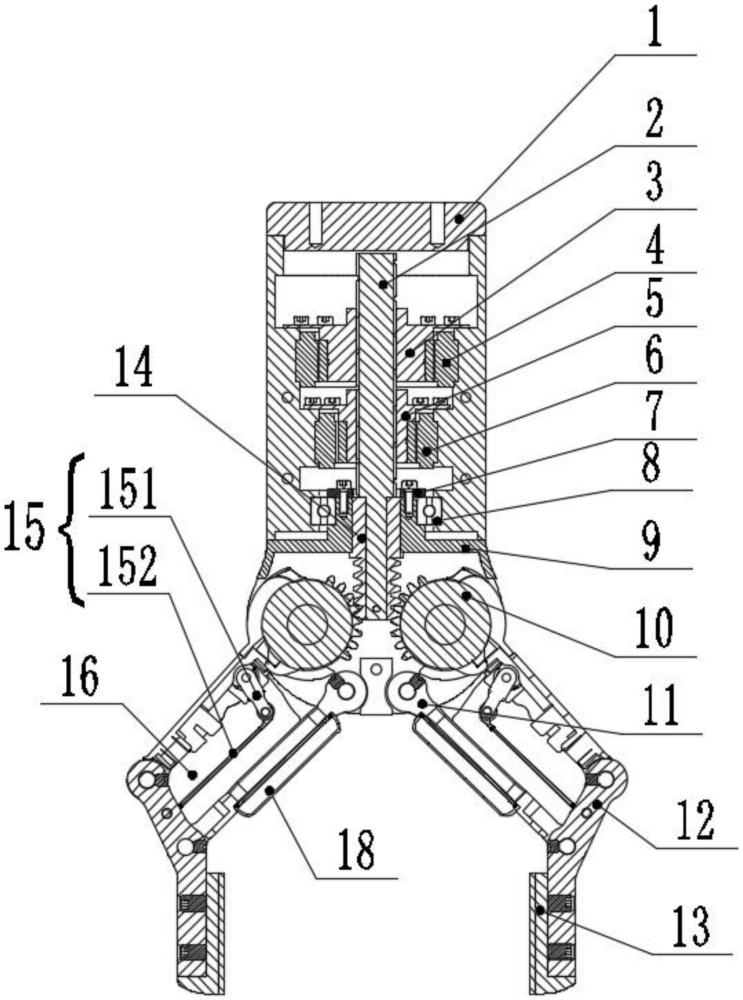
3、提供一种旋转夹持装置,包括固定部和夹持部;所述固定部设置有滚珠花键复合丝杠;所述固定部一端设置有第一连接端,固定部另一端用于与夹持部转动连接;所述滚珠花键复合丝杠包括驱动螺母、驱动电机和丝杆,丝杆一端与夹持部连接,随着丝杆的运动使得夹持部实现转动和/或夹持。
4、一种实施方式,所述驱动电机选自无框力矩电机,所述无框力矩电机套设于驱动螺母外部,驱动驱动螺母发生转动,所述无框力矩电机与固定部连接。
5、一种实施方式,所述固定部包括壳体,所述壳体包括顶端盖、左盖、右盖;所述夹持部包括底座和夹手,所述底座包括前盖以及后盖,丝杆与夹手连接。
6、一种实施方式,所述左盖和右盖围合形成一腔体,设置有第一环形安装腔、第二环形安装腔、第三环形安装腔、第四环形安装腔;所述驱动螺母包括第一丝杆螺母和第二花键螺母,驱动电机包括第一电机和第二电机;第一丝杆螺母设置于第一环形安装腔内,第一电机设置于第二环形安装腔内,第二花键螺母设置于第三环形安装腔内,第二电机设置于第四环形安装腔内。
7、一种实施方式,所述壳体底部开设一通孔,夹持部的底座顶端与通孔转动连接。进一步的,两者间隙配合。丝杆穿过通孔与夹手连接。
8、一种实施方式,还包括第一轴承,所述左盖和右盖上还设置有第六环形安装腔,第一轴承安装于第六环形安装腔内,夹持部底座顶端与第一轴承的内圈固定连接,第一轴承的外圈与第六环形安装腔内壁固定连接。
9、一种实施方式,还包括轴承压板,所述左盖和右盖上还设有第五环形安装腔,所述轴承压板安装在第五环形安装腔内,轴承压板与夹持部底座顶端连接,轴承压板与夹持部底座相配合并与第一轴承内圈相抵触固定。
10、一种实施方式,所述夹持部底座顶端设置有供丝杆穿过的通孔,通孔内设有转动干涉部,丝杆被驱动运动后,转动丝杆实现夹持部的旋转,延其轴向方向在通孔内往复运动;丝杆末端与夹手连接,驱动夹手实现夹持和松开。
11、一种实施方式,所述夹手包括从动齿轮杆、夹爪指以及平行杆;所述从动齿轮杆具有至少两个,对称设置在丝杆四周;所述从动齿轮杆包括固定连接的从动齿轮和齿轮杆体,所述从动齿轮铰接在前盖和/或后盖上,且与第二齿条啮合;所述齿轮杆体末端与夹爪指一端铰接;所述平行杆一端铰接在前盖和/或后盖上,另一端铰接在夹爪指上;所述丝杆末端设有第二齿条,与从动齿轮杆连接,丝杆往复运动带动从动齿轮杆往复转动。
12、一种实施方式,所述夹手还包括连接杆,所述连接杆包括第一杆体和第二杆体;所述第一杆体一端铰接在齿轮杆体上,另一端铰接在第二杆体一端,所述第二杆体另一端铰接在夹爪指上。所述第一杆体、第二杆体齿轮杆体和夹爪指始终为平行四边形。所述连接杆和平行杆两侧还设置有侧端盖,内侧还设置有底端盖。
13、一种实施方式,所述夹爪指末端设置有pom夹持指。
14、本实用新型还提供一种工业机器人,包括机械臂,所述机械臂末端连接有如上所述的旋转夹持装置。
15、本实用新型的有益效果是:本实用新型的旋转夹持装置能实现在夹持的情况下进行旋转,且体积小巧,集成化高,应用场景广阔。独特的滚珠花键复合丝杠传动结构使得夹持和旋转能分别单独运行,互不干扰。
技术特征:1.一种旋转夹持装置,包括固定部和夹持部;所述固定部设置有滚珠花键复合丝杠;所述固定部一端设置有第一连接端,固定部另一端用于与夹持部转动连接;所述滚珠花键复合丝杠包括驱动螺母、驱动电机和丝杆,丝杆一端与夹持部连接,随着丝杆的运动使得夹持部实现转动和/或夹持。
2.根据权利要求1所述的旋转夹持装置,其特征在于,所述驱动电机选自无框力矩电机,所述无框力矩电机套设于驱动螺母外部,驱动驱动螺母发生转动,所述无框力矩电机与固定部连接。
3.根据权利要求1所述的旋转夹持装置,其特征在于,所述固定部包括壳体,所述壳体包括顶端盖、左盖、右盖;所述夹持部包括底座和夹手,所述底座包括前盖以及后盖,丝杆与夹手连接。
4.根据权利要求3所述的旋转夹持装置,其特征在于,所述左盖和右盖围合形成一腔体,设置有第一环形安装腔、第二环形安装腔、第三环形安装腔、第四环形安装腔;所述驱动螺母包括第一丝杆螺母和第二花键螺母,驱动电机包括第一电机和第二电机;第一丝杆螺母设置于第一环形安装腔内,第一电机设置于第二环形安装腔内,第二花键螺母设置于第三环形安装腔内,第二电机设置于第四环形安装腔内。
5.根据权利要求3所述的旋转夹持装置,其特征在于,所述壳体底部开设一通孔,夹持部的底座顶端与通孔转动连接。
6.根据权利要求3所述的旋转夹持装置,其特征在于,还包括第一轴承,所述左盖和右盖上还设置有第六环形安装腔,第一轴承安装于第六环形安装腔内,夹持部底座顶端与第一轴承的内圈固定连接,第一轴承的外圈与第六环形安装腔内壁固定连接。
7.根据权利要求6所述的旋转夹持装置,其特征在于,还包括轴承压板,所述左盖和右盖上还设有第五环形安装腔,所述轴承压板安装在第五环形安装腔内,轴承压板与夹持部底座顶端连接,轴承压板与夹持部底座相配合并与第一轴承内圈相抵触固定。
8.根据权利要求3所述的旋转夹持装置,其特征在于,所述夹持部底座顶端设置有供丝杆穿过的通孔,通孔内设有转动干涉部,丝杆被驱动运动后,转动丝杆实现夹持部的旋转和/或沿其轴向方向在通孔内往复运动;丝杆末端与夹手连接,驱动夹手实现夹持和松开。
9.根据权利要求3所述的旋转夹持装置,其特征在于,所述夹手包括从动齿轮杆、夹爪指以及平行杆;所述从动齿轮杆具有至少两个;所述从动齿轮杆包括固定连接的从动齿轮和齿轮杆体,所述从动齿轮铰接在前盖和/或后盖上,且与第二齿条啮合;所述齿轮杆体末端与夹爪指一端铰接;所述平行杆一端铰接在前盖和/或后盖上,另一端铰接在夹爪指上;所述丝杆末端设有第二齿条,与从动齿轮杆连接,丝杆往复运动带动从动齿轮杆往复转动。
10.一种工业机器人,包括机械臂,其特征在于,所述机械臂末端连接有如权利要求1-9中任意一项所述的旋转夹持装置。
技术总结本技术公开了一种旋转夹持装置及工业机器人,包括固定部和夹持部;所述固定部设置有滚珠花键复合丝杠;所述固定部一端设置有第一连接端,固定部另一端用于与夹持部转动连接;所述滚珠花键复合丝杠包括驱动螺母、驱动电机和丝杆,丝杆一端与夹持部连接,随着丝杆的运动使得夹持部实现转动和/或夹持。本技术的旋转夹持装置能实现在夹持的情况下进行旋转,且体积小巧,集成化高,应用场景广阔。技术研发人员:申鹏林,朱路生,邓世海,杨海斌,王鸿森受保护的技术使用者:成都卡诺普机器人技术股份有限公司技术研发日:20231013技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52430.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表