一种可切换行走模式的深海挖沟机及非触底作业方法
- 国知局
- 2024-07-09 17:11:28
本发明涉及一种海底挖沟铺缆装备及,具体涉及一种可切换行走模式的深海挖沟机及非触底作业方法。
背景技术:
1、海底管线在复杂的海洋环境中确实面临诸多挑战,包括海底水流、不规则海床、海底土壤稳定性以及外部机械损伤等问题。为了保证管线的稳定并减少外部机械损伤,采用挖沟机挖沟埋设线缆是一个常见的解决方案。
2、现有深海线缆铺设挖沟机装置存在如下问题:
3、1、现有技术中挖沟机的行走动力主要为拖拽式,行走动力来源于施工作业船,而犁式挖沟机的作业方式是通过母船拖拽犁在海底挖出一条沟,之后将管道或者电缆埋入,对母船依赖大,作业深度也较小。自行式挖沟机的出现虽然解决了对母船的依赖问题,但单一采用履带或滑橇行走模式,对复杂海底底质的适应性不强;
4、2、目前深海挖沟机的开沟方式多种多样,现有的开沟方式主要有犁式开沟、射流开沟、切割开沟等,但这些开沟方式都比较单一,无法很好地适应不同的海底底质;
5、3、深海挖沟机在挖沟作业过程中,当遇到不良底质时,对自身平衡难以控制,会出现倾斜甚至侧翻的风险,因此保持挖沟机在作业过程中的平衡是一个亟需要解决的问题;
6、4、深海挖沟机在开挖作业时,挖沟的深度受到开挖装置的限制,很可能出现挖沟深度过深或过浅的情况;
7、5、深海挖沟机在行进作业过程中,由于重量过重,当遇到紧急情况需要紧急制动时,很可能会以惯性与冲击力对挖沟机造成损害;
8、6、由于某些作业地点海底电缆纵横交错,部分海底电缆的埋设路径及埋设深度已与原始记录有一定误差,且受定位精度和挖沟设备操作精度等因素的影响,采用传统的挖沟机触底作业方式在对海底线缆抢修时,会存在破坏原有海底电缆的风险。
技术实现思路
1、本发明目的是提供一种可切换行走模式的深海挖沟机及非触底作业方法,该装置可实现面对不同海底底质行走模式的切换、保持机体的平衡以及挖沟机在遇到沉陷时的脱困,其非触底作业方法,可在海底管道、线缆维修时,实现精准的小范围作业,避免挖沟机与海底管道等海底设施的接触,提高了作业效率、将挖沟风险降到了最低,同时也减少了对海底生态环境一定程度的破坏。
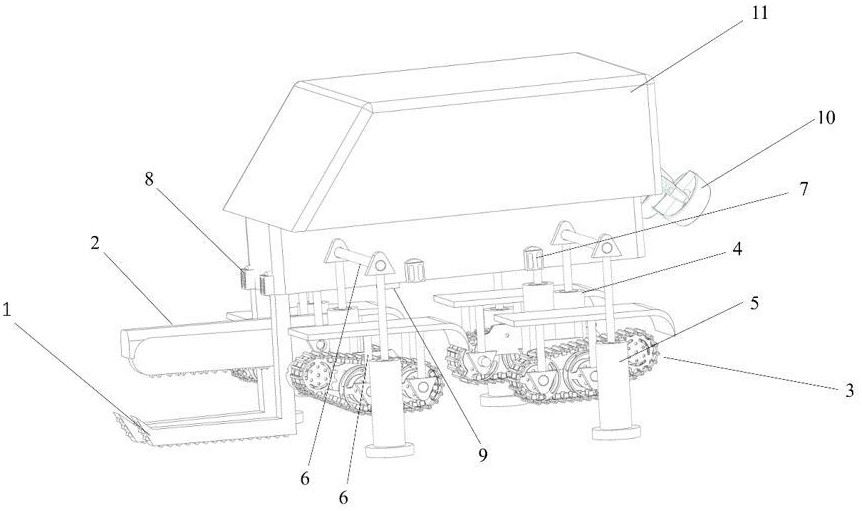
2、一种可切换行走模式的深海挖沟机,其特征在于,包括开沟系统、行走动力单元、液压系统、支撑连杆、智能控制系统、挖沟机机体。所述开沟系统包括射流机构和链机构,射流机构包括喷射臂,链机构包括链锯和挡板,射流机构和链机构均设置于挖沟机机体底部,所述行走动力单元包括履带行走装置、滑橇行走装置、辅助螺旋推进器,履带行走装置、滑橇行走装置分别对称布置在挖沟机机体前后左右四个方向,辅助螺旋推进器连接在挖沟机尾部,可上、下、左、右转动,当挖沟机在滑橇模式行走时,给挖沟机提供动力所述液压系统包括第一种液压缸和第二种液压缸,每种液压缸共有四个分别布置在挖沟机的机体前后左右四个方向。所述履带行走装置、滑橇行走装置分别包含四个,四个履带行走装置与四个滑橇行走装置分别通过支撑连杆两两相连,构成四个行走单元,分别对称布置在挖沟机机体前后左右四个方向,通过第一种液压杆与挖沟机机体相连,所述履带行走单元包括行走履带、传动齿轮、拖带轮、驱动装置、旋转驱动装置,所述滑橇行走装置与履带行走装置之间的距离保持在0.3-0.5 m。
3、所述辅助螺旋推进器共有2个,布置在挖沟机机体的后侧,当挖沟机切换到滑橇模式时,辅助螺旋推进器同步开始工作,为挖沟机行走提供动力。
4、所述喷射臂由有两个,在挖沟机底部对称布置,每个喷射臂由两排喷嘴构成。
5、所述第一种液压缸,包括活塞杆、液压缸筒体、密封装置,第一种液压缸共有四个,通过第一种液压缸实现四个行走单元与挖沟机机体的连接。
6、所述第二种液压缸,包括活塞杆、液压缸筒体、密封装置,第二种液压缸共有四个,通过支撑连杆与挖沟机机体相连。
7、所述支撑连杆分为两种,第一种共有16个,每4个为一组用以连接履带行走装置和滑橇行走装置构成4个行走单元,第二种共有4个用以连接第二种液压缸与挖沟机机体。
8、所述智能控制系统包括声呐、深度传感器、斜度传感器,分别安装在挖沟机机体底部与两侧。
9、所述声呐、深度传感器用以监测挖沟机机体底部与海底的距离,所述斜度传感器,当挖沟机机体不平衡时,安装在挖沟机底盘上的斜度传感器发出信号,智能控制系统再调节第一种液压缸使挖沟机恢复到平衡状态。本发明还公开一种具有如上一种可切换行走模式的深海挖沟机非触底作业方法,包括如下步骤:
10、s1、当挖沟机到达海底作业之前,由施工作业船主吊将挖沟机本体吊入水中,安装在挖沟机底部的深度传感器开始工作;
11、s2、当挖沟机底部距海底距离为6-8 m时,施工作业船主吊停止挖沟机下降,连接挖沟机四个行走单元的第一种液压缸开始工作,第一种液压缸伸长使四个行走单元到达距离车体5-6 m时,第一种液压缸停止工作;
12、s3、当第一种液压缸停止工作后,连接在四个行走单元上的旋转驱动装置开始工作,旋转驱动装置使四个行走单元旋转180°后停止工作,第一种液压缸缩短到原来位置,施工作业船主吊继续将挖沟机下降到海底;
13、s4、当挖沟机到达海底后,根据实际工程如需行走模式切换,启动安装在挖沟机两侧的第二种液压缸,通过第二种液压缸底部与海底的反作用力将挖沟机撑起,使挖沟机的四个行走单元底部与海底距离保持在6-8 m;
14、s5、当第二种液压缸停止工作后,连接在四个行走单元上的旋转驱动装置开始工作,旋转驱动装置使四个行走单元旋转180°后停止工作,第一液压缸缩短到原来位置,与挖沟机机体相连的第二液压缸缩短到原来位置,将挖沟机四个行走单元放回原来位置;
15、s6、当挖沟机作业海底底质为硬土海床时,挖沟机可根据上述三个步骤将挖沟机行走模式切换为四履带行走模式,此时挖沟机的开沟作业模式以链机构为主要开沟方式,射流机构为辅助开沟方式,由链机构先进行破土,破土后再启动射流机构,同时进行开沟;
16、s7、当挖沟机作业海底底质为软土海床时,挖沟机可根据前三个步骤将挖沟机行走模式切换为,四滑橇行走模式,此时辅助螺旋推进器同步启动,为挖沟机提供前进动力,此时挖沟机的开沟作业模式以射流机构为主要开沟方式,关闭链机构;
17、s8、当挖沟机以链锯开沟方式进行开沟时,其链锯可根据挖沟深度的不同,调节与挖沟机机体的角度,调节范围为0°-45°;链锯可根据实际工程的需要,在挖沟机前端与后端之间进行移动;链锯的切割功率可根据实际工程需要进行调节,最大功率为600 kw,最大开沟深度为2.3 m,最大开沟宽度为0.5 m,可埋设最大缆径400 mm,弯曲半径5 m;
18、s9、当挖沟机以射流机构进行开沟时,对喷射臂到海床的距离进行控制,范围为0-2.5 m,其喷射臂与海床间的角度可以进行控制,调控范围为0°-45°,其喷射臂还可根据实际工程的需要在挖沟机前端与后端间进行移动,喷射臂的喷冲功率可根据实际工程需要进行调节,最大功率为900 kw喷冲功率,开沟深度为1.0-3.3 m,喷冲臂间距为200-600 mm,可适应最大缆径450 mm;
19、s10、当进行海底线缆抢修作业时,挖沟机可采取非触底作业,首先由施工作业船主吊将挖沟机本体吊入海水中,安装在挖沟机底部的监测系统开始工作,根据施工作业船的定位系统,将挖沟机放到指定位置;
20、s11、当挖沟机滑橇距离海底距离为0.6 - 0.8 m时,停止下放挖沟机,安装在挖沟机底部的喷冲臂上的两排喷嘴喷冲海床,根据海底底质情况调整喷冲功率,使需要维修的线缆暴露出来;
21、s12、当挖沟机开始工作后,通过智能控制系统实时监测挖沟机工作状态,以便能够根据现场情况实时调整挖沟机位置,挖沟结束后,通过施工作业船主吊将挖沟机回收。
22、本发明的有益效果:
23、1、本发明充分考虑深海海底复杂底质以及挖沟机工作环境复杂的问题,使挖沟机在面对不同海底底质时,可以进行履带和滑橇行走模式切换,避免了面对不同海底底质对挖沟机行走装置更换的麻烦,以提高挖沟机的工作效率,滑橇行走模式可适应软土海床,履带行走模式可适应硬土海床,四履带驱动模式,在海底跨越复杂地形和转向上更具有优势;
24、2、本发明采用链锯和喷冲破土两种开沟模式同时或交替进行,以适应各种海底底质的破碎、切割和开沟需求,作业对象广泛;开沟方式多,适用范围广。两种开沟模式与两种行走模式相互配合,对于不同海底底质采用不同的行走模式与开沟模式,大大提高了深海铺缆的工作效率;
25、3、本发明通过智能控制系统中的斜度传感器在感知挖沟机体发生失衡时及时向挖沟机控制系统传输信号,使挖沟机突然遇到不良底质时,对挖沟机机体进行及时调平,减少挖沟机发生倾斜、侧翻的风险;
26、4、本发明通过对两种液压缸高度的调节,使挖沟机机体与海底的距离发生了变化,从而可以对挖沟机射流机构、链机构与海底之间的距离进行调接,以实现对挖沟深度的调节;
27、5、本发明液压系统可通过对第一种液压缸的控制,可以实现缓冲挖沟机突然的制动和冲击,降低挖沟机的磨损,通过第二种液压缸可以在挖沟机遇到沉陷时及时脱困;
28、6、本发明非触底作业方法,在挖沟机工作过程中,通过智能控制系统实时监测挖沟机工作状态,以便能够根据现场情况实时调整挖沟机位置,避免挖沟机与接触及刮碰海底电缆等海底设施,将挖沟的风险降到最低。
本文地址:https://www.jishuxx.com/zhuanli/20240617/57321.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表