清淤机器人的制作方法
- 国知局
- 2024-07-09 17:46:58
本技术涉及清淤设备,具体为清淤机器人。
背景技术:
1、根据地域的不同,室外排水设计规范提供了城镇生活污水收集和处理系统中含砂量的设计指标,实际运行过程中,污水中的泥砂含量常常高于设计值,同时,根据现行的排水行业现状,除初期雨水外,含泥砂量较大的雨水也要经过雨水系统进入集中的污水处理设施中做初步处理后除出,而这部分雨水中的泥砂含量更高。
2、超过设计标准的泥砂会规程在泵井、集水坑、各类无搅拌和反冲洗设备的水池中,减少了管道系统的有效载液量,降低了管道系统的通量,从而引进堵塞,降雨期间排水不畅,甚至小雨也会形成局部内涝,造成损失十分严重,对污水集中处理设施的运行效率、机械设备也会造成磨损。
3、受限空间的清淤疏通问题已成为污水处理行业平稳运行的关键点,目前,我国城市排水系统中泵井、集水井、各类池体的清淤工作仍然依靠人工进入受限空间作业,主要有如下的缺点:
4、1)施工准备工作繁琐,需要降水、排空、空气置换等;
5、2)从安全管理的角度,风险很大,每年都有各类安全意外和责任事故发生;
6、3)劳动强度大,效率低,人工清理过程中,吸污管本体重量叠加管内持液重量,有时需要两位操作人员同时在受限空间内工作,另外,为确保安全,在受限空间内工作满一定时间后,必须退出作业现场休息。
技术实现思路
1、针对现有技术的不足,本实用新型提供了清淤机器人,具备无需人工下场等优点,解决了劳动强度大,效率低,人工清理过程中,吸污管本体重量叠加管内持液重量,有时需要两位操作人员同时在受限空间内工作,另外,为确保安全,在受限空间内工作满一定时间后,必须退出作业现场休息的问题。
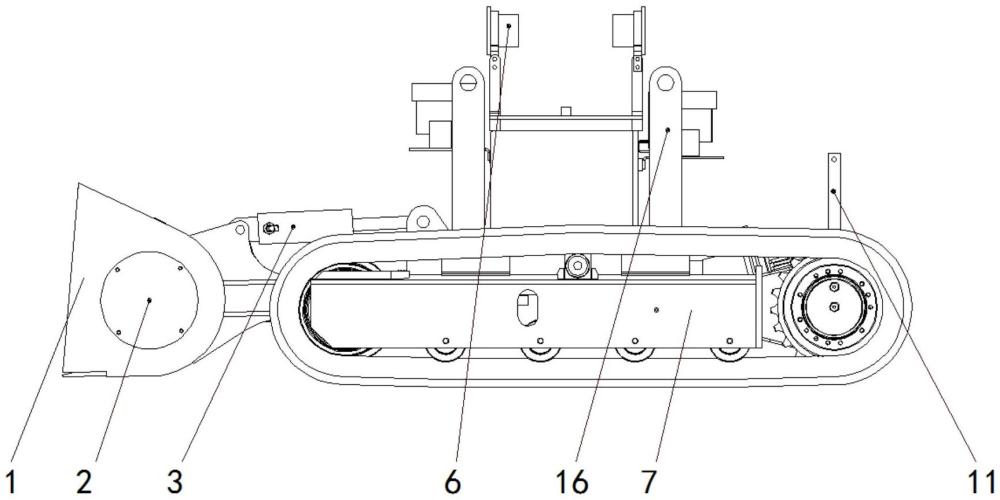
2、为实现上述目的,本实用新型提供如下技术方案:清淤机器人,包括底盘和远程控制设备,所述底盘上设置有清淤机构;
3、所述清淤机构包括铰接于底盘顶部的一体化防爆箱,所述底盘顶部固定安装有吊杆,所述底盘的左侧铰接有举升油缸,所述举升油缸的左侧设置有泥浆清理铲,所述泥浆清理铲的正面与背面均设置有侧盖板;
4、所述泥浆清理铲的右侧设置有与一体化防爆箱相连接的连接管,所述一体化防爆箱的左侧设置有前置摄像头,所述一体化防爆箱的顶部设置有水下led灯,所述一体化防爆箱的右侧设置有后方摄像头,所述一体化防爆箱的右侧设置有泥浆出口,所述泥浆出口的外侧设置有泥浆输送装置接头。
5、进一步,所述泥浆清理铲的内部转动连接有清淤螺旋杆,所述泥浆清理铲的内部设置有挡板,所述泥浆清理铲的内侧设置有正向盖板。
6、进一步,所述底盘上设置有履带行走机构,且履带行走机构通过液压马达驱动。
7、进一步,所述泥浆清理铲的右侧设置有托架,且托架后端与底盘相铰接,托架和底盘之间铰接有举升油缸。
8、进一步,所述底盘左右两侧的履带液压驱动系统相互独立,以完成前进、后退、左右原地转向的运动。
9、进一步,所述一体化防爆箱的顶部设置有托架,所述前置摄像头、后方摄像头以及led照明灯均通过托架与一体化防爆箱固定连接。
10、与现有技术相比,本申请的技术方案具备以下有益效果:采用本发明所述机器人代替人工清淤,有如下的优点。
11、本实用新型采用功能全面的远程操控平台,操控系统控制设于机器人底盘上的液压系统驱动清淤作业,作业动作即时迅速;淤泥清理铲可以根据视频图面中淤泥的堆积情况调整角度,设置在淤泥清理铲之内的螺旋输送设置,可以把松动的淤泥向淤泥吸入管的入口处输送,提出淤泥输送效率,实现了更好的清理效果;机械结构简单,主要工作部件均固定在一体化的底盘上,减少紧固件,提高设备的可靠性;包括液压泵、摄像头和照明灯在内的电气元件等均采用了防尘、防爆、防水设计,防护等级为ip67,减少了作业面的安全风险;同时并配备了视频采集、存储功能,所存储的视频画图,可以用于清淤作业最终成果的验收,为便于在不同场景下部署,一体化底盘上设计了多个起吊点,便于利用吊车、门架等设备,将机器人置入复杂的受限空间中,同时尾部的吊点,可以连接钢缆在应急回撤时使用。
技术特征:1.清淤机器人,包括底盘(7)和远程控制设备(701),其特征在于:所述底盘(7)上设置有清淤机构;
2.根据权利要求1所述的清淤机器人,其特征在于:所述泥浆清理铲(1)的内部转动连接有清淤螺旋杆(12),所述泥浆清理铲(1)的内部设置有挡板(13),所述泥浆清理铲(1)的内侧设置有正向盖板(14)。
3.根据权利要求1所述的清淤机器人,其特征在于:所述底盘(7)上设置有履带行走机构,且履带行走机构通过液压马达驱动。
4.根据权利要求1所述的清淤机器人,其特征在于:所述泥浆清理铲(1)的右侧设置有托架,且托架后端与底盘(7)相铰接,托架和底盘(7)之间铰接有举升油缸(3)。
5.根据权利要求1所述的清淤机器人,其特征在于:所述底盘(7)左右两侧的履带液压驱动系统相互独立,以完成前进、后退、左右原地转向的运动。
6.根据权利要求1所述的清淤机器人,其特征在于:所述一体化防爆箱(8)的顶部设置有托架,所述前置摄像头(5)、后方摄像头(9)以及led照明灯均通过托架与一体化防爆箱(8)固定连接。
技术总结本技术涉及清淤机器人,包括底盘和远程控制设备,所述底盘上设置有清淤机构,所述清淤机构包括铰接于底盘顶部的一体化防爆箱。该清淤机器人,采用功能全面的远程操控平台,操控系统控制设于机器人底盘上的液压系统驱动清淤作业,作业动作即时迅速;淤泥清理铲可以根据视频图面中淤泥的堆积情况调整角度,设置在淤泥清理铲之内的螺旋输送设置,可以把松动的淤泥向淤泥吸入管的入口处输送,提出淤泥输送效率,实现了更好的清理效果;机械结构简单,主要工作部件均固定在一体化的底盘上,减少紧固件,提高设备的可靠性,同时并配备了视频采集、存储功能,所存储的视频画图,可以用于清淤作业最终成果的验收。技术研发人员:王勇,王刚,罗煜川受保护的技术使用者:优佳(广州)水务科技有限公司技术研发日:20231013技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/60721.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表