基于最大相关熵准则的冲压车间实时主动噪声控制方法
- 国知局
- 2024-06-21 10:40:23
本发明属于降噪,尤其涉及基于最大相关熵准则的冲压车间实时主动噪声控制方法。
背景技术:
1、随着现代社会的工业化和城市化进程加速,噪声污染问题逐渐加剧,过高的噪声对人们的日常生活产生严重影响,降低工作效率,影响安全生产,并可能对身体健康造成伤害,噪声控制问题成为环境保护中不容忽视且广受社会关注的议题。通常,噪声处理主要采取以下三种方式:在噪声源头处进行噪声抑制、在噪声传播过程中消除噪声以及在噪声接收点处消除噪音。在许多情况下,噪声的产生是由多种因素共同作用的结果,这些因素往往是不可控制的。因此,为了改善信号质量,主动降噪系统在接收端进行噪声控制已经成为一个热门的研究方向,尤其是随着近年来智能终端的普及和广泛应用。
2、主动降噪原理是通过系统对噪声进行采集,并利用算法发出振幅相同、相位相反的控制噪声与初级噪声在空间内相互干涉叠加,从而相互抵消。滤波-x最小均方算法(fxlms)及其改进算法凭借着较低的计算量和较好的性能,广泛地应用在有源噪声控制领域,许多学者针对运用在前馈系统中的fxlms展开了研究。wu等人开发了滤波-x对数误差lms(fxloglms)算法,使对数误差最小化,fxloglms算法克服了基于振幅阈值方法的缺点,不需要任何先验知识或噪声估计,但当误差信号振幅较小时,该算法的滤波器系数更新发生变化导致降噪效果不好。
3、由于在实际的主动降噪系统中,经常会面临各种非线性问题,例如,初始原噪声、声音传播路径、电子设备中等都可能存在非线性,然而,fxlms算法是一种线性结构,因此在处理非线性问题时性能可能有所下降,为此,出现了各种的非线性噪声控制算法。zhang k等人采用神经网络代替线性自适应fir滤波器来消除噪声;guo x等人提出非线性volterrafxlms(vfxlms)算法,该算法相比于fx-lms算法降噪性能得到了明显提升,但随着输入的增加导致计算复杂度高。随后,fslms(filtered-s leastmean square)算法通过对输入信号进行非线性拓展,具有较低的计算复杂度,并且在性能上超越了vfxlms算法,因此得到了广泛应用。然而,由于该滤波器结构缺乏交叉项(即初级噪声中不同采样时间信号的乘积项),其性能受到一定的限制。sicuranza g l提出的gflann(generalized functionallinkartificial neural net-work)滤波结构解决了缺乏交叉项问题,但非线性部分的控制器系数具有内在的依赖关系,因此很难找到精确的解。
4、近年来,随着信息熵(ie)的发展,将信息熵方法应用于主动噪声控制系统中取得了良好的效果。ie的相关熵是度量两个任意标量随机变量之间的非线性和局部相似性,在主动降噪系统中主要是识别初级噪声和次级声源之间的相似性,最大相关熵准则(mcc)旨在最大化初级噪声和次级声源的相似性,可有效地提高anc系统的鲁棒性。nikhil等人开发了一种基于相关熵的算法,提高了nanc系统对非高斯参考噪声信号的鲁棒性。2017年,lu等人提出了一种基于mcc的滤波-x递归最大相关熵(fxrmc)算法,该算法主要用于脉冲噪声环境,具有更好的降噪能力和稳定性,但其算法计算复杂度高,不适用于实际环境中。
技术实现思路
1、为解决上述技术问题,本发明提出基于最大相关熵准则的冲压车间实时主动噪声控制方法,在处理非线性问题和提高系统性能方面取得了显著的改进效果,对于实际环境中主动降噪应用具有重要的意义和潜力。
2、为实现上述目的,本发明提供了基于最大相关熵准则的冲压车间实时主动噪声控制方法,包括:
3、采集冲压车间的噪声数据;
4、将所述噪声数据经过预设的初级路径进行传递,获取待衰减信号;
5、将所述噪声数据经过控制滤波器处理,获取反相控制信号,将所述反相控制信号经过预设的次级路径进行传递;
6、基于所述待衰减信号和传递后的所述反相控制信号,获取误差信号,基于所述误差信号更新滤波器权值进行冲压车间实时主动降噪。
7、可选地,获取反相控制信号包括:
8、将所述噪声数据输入bp神经网络,获取预测噪声数据;
9、基于所述预测噪声数据,获取待衰减信号;
10、基于所述待衰减信号与所述噪声数据,获取时延数据;
11、基于所述时延数据补偿所述预测噪声数据;
12、将所述噪声数据和补偿的所述预测噪声数据输入控制滤波器,获取所述反相控制信号。
13、可选地,将所述噪声数据和补偿的所述预测噪声数据输入控制滤波器包括:
14、所述控制滤波器分别对所述噪声数据和补偿后的所述预测噪声数据进行数据扩展;
15、基于所述控制滤波器的自适应权重系数,对扩展后的数据进行迭代,获取所述反相控制信号。
16、可选地,扩展后的数据包括第一预设数据和第二预设数据;
17、所述第一预设数据为:
18、
19、其中,x1(n)为第一预设数据,l为滤波器长度,n为时间指数,x(n)为噪声数据;
20、所述第二预设数据为:
21、
22、其中,x2(n)为第二预设数据向量,x2(n)为噪声信号扩展后的数据。
23、可选地,所述控制滤波器的自适应权重系数表示为:
24、
25、其中,w1(n)为一阶滤波器权值系数向量,w1(n)为第n个信号对应的滤波器自适应权值系数;
26、
27、其中,w2(n)为二阶滤波器权值系数向量,w2(n,n)为扩展后第n个信号对应的二阶滤波器权值系数;
28、所述控制滤波器的自适应权重系数更新表示为:
29、wp(n+1)=wp(n)+μp(n)e(n)x'p(n)q(n)
30、其中,p=1,2,为滤波器阶数,μp(n)为动态自适应步长,表示为:
31、
32、μpθ
33、其中,为初始的自适应步长,是一个用来避免除以零的数,ep(n)表示输入信号分量的能量,表达式为:
34、
35、εe(n)为误差信号e(n)能量的大小,表示为:
36、εe(n)=γεe(n-1)+(1-γ)e2(n)q(n)
37、其中γ为一个常数,取值范围为(0.9,1),
38、q(n)为最大相关熵,其表示为:
39、
40、σ2
41、其中,为最大相关熵中核的大小,其表达式如下:
42、
43、
44、
45、其中,λ为一个常数,取值为0.01,为n时刻噪声信号的平均值,为噪声信号的样本方差。
46、可选地,所述反相控制信号为:
47、
48、其中,y(n)为反相控制信号,x(n-i)为一阶信号数据,w1(n-i)为一阶滤波器权值系数,x(n-i)x(n-j)为二阶扩展信号数据,w2(n-i,n-j)为二阶滤波器权值系数。
49、可选地,所述误差信号为:
50、e(n)=d(n)-y'(n)=x(n)*p(n)-s(n)*y(n)
51、其中,e(n)为误差信号,y'(n)为反相控制信号播放出来经过次级路径传递后的信号,s(n)为次级路径s(z)的脉冲响应。
52、与现有技术相比,本发明具有如下优点和技术效果:
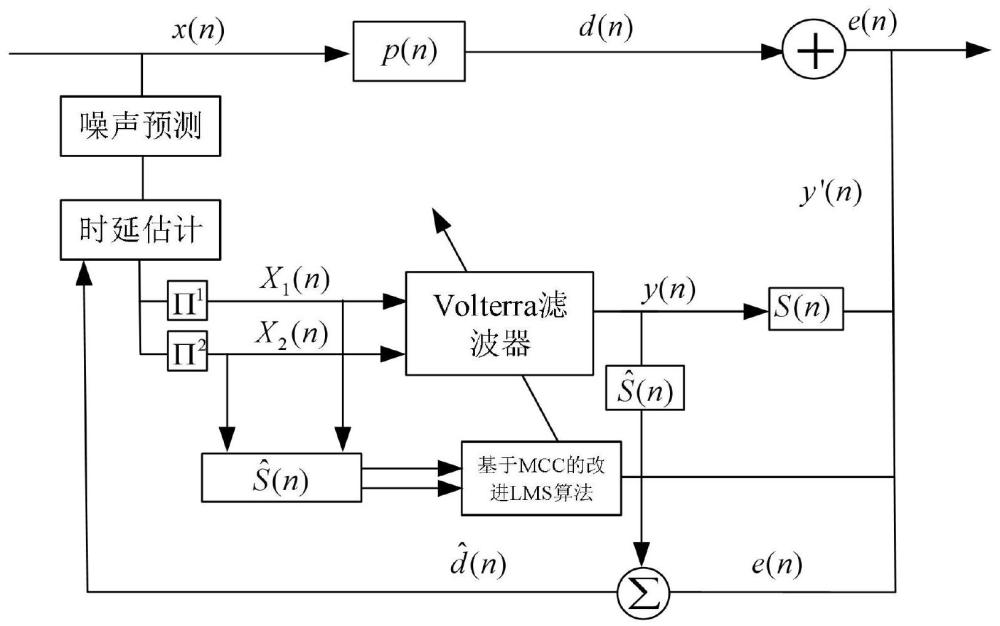
53、本发明针对在冲压车间的强噪声实际工业生产环境中,提出了基于噪声预测结合最大相关熵准则的实时主动降噪控制算法。为解决噪声控制系统结构引入的相位延迟,本发明首先增加了噪声预测和时延估计,通过时延估计补偿预测值,将补偿后的信号送入降噪系统;其次,针对实际噪声环境中和系统本身出现的非线性问题,降噪系统选用二阶沃尔泰拉滤波器作为控制器;最后为提高算法的鲁棒性和性能,在运算过程中结合最大相关熵准则(mcc)自适应的更新步长以及整个降噪系统的权值更新,同时,根据参考信号的样本方差自适应调整mcc的核大小。实验结果表明,本发明所提出的算法在处理非线性问题和提高系统性能方面取得了显著的改进效果。
本文地址:https://www.jishuxx.com/zhuanli/20240618/21095.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表