频域稀疏自适应线谱增强方法、系统、介质及设备与流程
- 国知局
- 2024-06-21 10:41:46
本发明涉及水声工程中声纳,具体地,涉及一种频域稀疏自适应线谱增强方法、系统、介质及设备。尤其地,涉及一种基于最大相关熵的频域稀疏自适应线谱增强方法及系统。
背景技术:
1、水声目标的辐射噪声主要由机械噪声、螺旋桨噪声和水动力噪声组成,在频域表现为连续谱和线谱的叠加。线谱的稳定性和唯一性为水声目标的探测与分类提供了重要的依据。近年来,由于推进技术和总体设计技术的不断发展,水声目标的辐射噪声级也逐年下降,线谱通常会被强干扰所淹没,突破低信噪比线谱增强技术对水声目标的探测与分类具有重要意义。
2、一方面,在水声信号处理中,通常采用基于最小均方误差(lms)的自适应线谱增强器(ale)对线谱进行增强。lms算法的目标是最小化估计误差的均方值,它在多种实际应用中都表现出了耀眼的性能。lms算法的核心假设是噪声服从高斯分布。尽管传统的水声信号处理亦采用高斯噪声假设,但在真实的海洋环境,特别是浅海和近海区域,噪声通常偏离高斯分布,呈现非高斯性。非高斯噪声的出现引入了多种非线性效应,这使得lms算法在处理水声信号时表现得差强人意。为了解决这一问题,本发明采用最大相关熵(mce)算法。mce算法旨在最大化滤波器输出和期望输出的互信息,从而不依赖于具体的噪声分布。此外,由于mce算法能够全面考虑噪声的概率密度函数,而不仅限于均值或方差,所以它在非高斯噪声中表现出更高的鲁棒性。
3、另一方面,采用ale对线谱进行增强时,ale的处理增益与输入信噪比息息相关。当输入信噪比较高时,ale的增益与其阶数呈正比。随着输入信噪比的降低,由于失调和稳态误差的存在,ale的增益急剧下降。为了改善ale的性能,可以利用ale频率响应在频域的稀疏性,采用稀疏自适应滤波算法降低失调和稳态误差,提高ale的增益。
4、专利文献cn116580719a(申请号:cn202310519725.0)公开了一种空时域联合的稀疏驱动自适应线谱增强方法,包括水听器的均匀线阵接收信源的远场平面波信号;将整个均匀线阵接收到的远场平面波信号输入空时联合滤波器;将下一个阵元接收到的远场平面波信号作为参考信号输入空时联合滤波器,直至处理完所有阵元接收到的远场平面波信号,以获取各个阵元各自对应的输出信号;获取各个输出信号各自对应的输出频谱;对多个输出频谱进行平方叠加并求平均,以获得输出结果;将输出结果从频域转换到时域,得到基于l1/2范数的稀疏驱动自适应线谱增强器的输入信号;将输入信号输入基于l1/2范数的稀疏驱动自适应线谱增强器进行权值更新;根据输入信号的长度持续迭代自适应权值,获取对应的输出信号。然而专利无法完全满足本发明的需求。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种频域稀疏自适应线谱增强方法、系统、介质及设备。
2、根据本发明提供的频域稀疏自适应线谱增强方法,包括:
3、步骤1,读取水声目标的辐射噪声信号x(n);
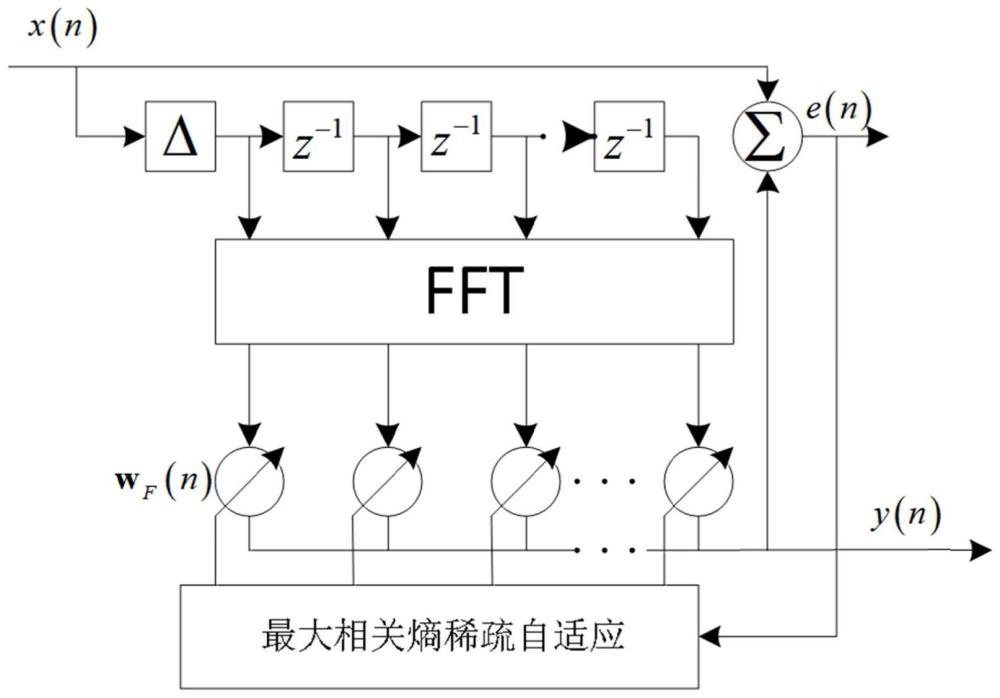
4、步骤2,对信号x(n)进行解相关延迟并划分成快拍,然后将快拍变换到频域作为自适应滤波器的输入;
5、步骤3,计算n时刻自适应滤波器的输出和估计误差;
6、步骤4,采用最大相关熵准则构造ale的代价函数,在代价函数中添加频域抽头权向量的l1范数作为惩罚约束项,并且推导出自适应滤波器频域抽头权向量的更新公式;
7、步骤5,利用更新公式对自适应滤波器的频域抽头权向量进行更新;
8、步骤6,重复执行步骤2-5,直至所有数据处理完毕。
9、优选的,所述步骤2包括:
10、步骤201,对信号x(n)进行解相关延迟得到x(n-δ);
11、步骤202,将x(n-δ)划分成快拍作为n时刻自适应滤波器的时域输入:
12、x(n-δ)=[x(n-δ),…,x(n-δ-l+1)]t (1)
13、其中,l为自适应滤波器的阶数,δ为解相关延迟量;
14、步骤203,利用快速傅里叶变换将x(k-δ)变换到频域作为n时刻自适应滤波器的频域输入:
15、xf(n-δ)=fft(x(n-δ)) (2)
16、其中,fft(·)表示快速傅里叶变换。
17、优选的,n时刻自适应滤波器的输出和估计误差表达式为:
18、
19、e(n)=x(n)-y(n) (4)
20、其中,为n时刻自适应滤波器的频域抽头权向量,初始值为0;(·)h表示共轭转置。
21、优选的,所述步骤4包括:
22、步骤401,采用最大相关熵准则构造ale的代价函数,在代价函数中添加频域抽头权向量的l1范数作为惩罚约束项:
23、
24、其中,σ表示核宽;||·||1表示l1范数;ρ>0控制l1范数影响大小的平衡因子;
25、步骤402,采用梯度下降算法,推导出自适应滤波器频域抽头权向量的更新公式:
26、
27、其中,μ为自适应滤波的步长;(·)*表示共轭;sgn(·)表示符号函数。
28、根据本发明提供的频域稀疏自适应线谱增强系统,包括:
29、模块m1,读取水声目标的辐射噪声信号x(n);
30、模块m2,对信号x(n)进行解相关延迟并划分成快拍,然后将快拍变换到频域作为自适应滤波器的输入;
31、模块m3,计算n时刻自适应滤波器的输出和估计误差;
32、模块m4,采用最大相关熵准则构造ale的代价函数,在代价函数中添加频域抽头权向量的l1范数作为惩罚约束项,并且推导出自适应滤波器频域抽头权向量的更新公式;
33、模块m5,利用更新公式对自适应滤波器的频域抽头权向量进行更新;
34、模块m6,重复调用模块m2-模块m5,直至所有数据处理完毕。
35、优选的,所述模块m2包括:
36、模块m201,对信号x(n)进行解相关延迟得到x(n-δ);
37、模块m202,将x(n-δ)划分成快拍作为n时刻自适应滤波器的时域输入:
38、x(n-δ)=[x(n-δ),…,x(n-δ-l+1)]t (1)
39、其中,l为自适应滤波器的阶数,δ为解相关延迟量;
40、模块m203,利用快速傅里叶变换将x(k-δ)变换到频域作为n时刻自适应滤波器的频域输入:
41、xf(n-δ)=fft(x(n-δ)) (2)
42、其中,fft(·)表示快速傅里叶变换。
43、优选的,n时刻自适应滤波器的输出和估计误差表达式为:
44、
45、e(n)=x(n)-y(n) (4)
46、其中,为n时刻自适应滤波器的频域抽头权向量,初始值为0;(·)h表示共轭转置。
47、优选的,所述模块m4包括:
48、模块m401,采用最大相关熵准则构造ale的代价函数,在代价函数中添加频域抽头权向量的l1范数作为惩罚约束项:
49、
50、其中,σ表示核宽;||·||1表示l1范数;ρ>0控制l1范数影响大小的平衡因子;
51、模块m402,采用梯度下降算法,推导出自适应滤波器频域抽头权向量的更新公式:
52、
53、其中,μ为自适应滤波的步长;(·)*表示共轭;sgn(·)表示符号函数。
54、根据本发明提供的存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现所述的频域稀疏自适应线谱增强方法的步骤。
55、根据本发明提供的电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被处理器执行时实现所述的频域稀疏自适应线谱增强方法的步骤。
56、与现有技术相比,本发明具有如下的有益效果:
57、本发明提供了一种基于最大相关熵的频域稀疏自适应线谱增强方法,一方面,采用最大相关熵算法,使得ale在非高斯噪声中表现出更高的收敛速度和鲁棒性;另一方面,充分利用了ale频率响应在频域的稀疏性,应用稀疏表示理论对其抽头权向量进行迭代求解,可以降低失调和稳态误差,使ale的抽头权向量更接近最优抽头权向量,提高ale的处理增益;最后,该算法计算量小,易于工程实现。
本文地址:https://www.jishuxx.com/zhuanli/20240618/21267.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表