宽窄带混合集成式主动噪声控制系统及方法
- 国知局
- 2024-06-21 11:25:56
本发明涉及汽车噪声控制,具体为一种应用于增程式电动汽车的宽窄带主动噪声控制技术。
背景技术:
1、随着以电驱动汽车为代表的新能源汽车迅猛发展,汽车动力系统正从内燃机驱动向电机驱动方向发展,但由于车用电池技术和基础设施等技术存在一定瓶颈,因此以增程式电驱动作为车辆驱动方式的过渡形式依旧具有广阔的市场前景。
2、通常增程式电动车主要以电机作为车辆动力系统,但是在车载动力电池电量低于某个阈值时会启动发动机给电池充电,因此增程式电驱动方式同时具备了纯电驱动工作模式和部分时间油电混合工作模式的复杂工作模式,这种驱动方式也必然会使车内噪声与传统以内燃机为动力的车内噪声具有较大的不同之处。这种驱动方式的车内噪声既具有以宽带随机为特点的路噪,也会在部分时间具有来自发动机工作而产生的窄带阶次噪声。因此可以将增程式车辆的噪声模式进行分类,即:(1)怠速充电模式,车内噪声以发动机窄带阶次噪声为主,(2)纯电驱动模式,车内噪声主要以宽带路噪为主,(3)驱动-充电模式,车内噪声以宽窄带混合噪声为主。但由于声掩蔽效应,车内宽带路噪声掩盖车内窄带发动机噪声,实际上车内噪声既包含窄带成分也包含宽带成分,但宽带占主要成分。窄带阶次噪声和宽带随机噪声的频谱特征差异明显,且较为容易采用特定的数字信号处理技术进行识别。针对宽窄带低频混合噪声控制,目前主要采用主动噪声控制系统进行处理,且相较于被动噪声控制方法,其具有硬件结构简单、控制效果明显等优势。
3、传统主动噪声控制系统的目标是尽可能地降低误差噪声的声压级。但是现有的控制技术并不能实现完全的噪声消除,因此在汽车声学设计中,并不是声压级越小越好,而是根据设计目标通过抑制一部分令人烦躁的噪声,保留一部分具有高辨识度的声音,这样有利于汽车声品质特性的凸显。传统的主动噪声控制方法不能实现这个目标,因此主动声品质控制算法应运而生,称之为主动声整形技术,此种技术主要针对发动机产生的声音;而针对路噪目前还是主要采用主动噪声控制技术,尽可能的降低传递到车内的噪声声压级。
4、主动噪声控制(anc)利用干涉相消的原理,利用声场中的次级声源发出与待消除噪声(初级噪声)幅值相等、相位相反的抵消噪声(次级噪声),在特定区域形成静音区,anc原理示意图如图1所示,主动声整形技术与主动噪声控制基本原理一致,其主要是在主动噪声控制技术的基础上衍生发展而来,通过算法改进和参数调节达到声音特征的自适应设计。
5、总体来说,现有技术存在如下问题:
6、由于宽窄带噪声频谱特性存在较大差异,其主要体现在宽带噪声的能量分布在较宽的频带上,且路面激励产生的路噪具有随机性,其在进行主动噪声控制时,依赖于参考信号与初级噪声之间的相干性。窄带阶次噪声的能量大分部集中在一个或多个频点上,且具有周期性的特点。因此两种噪声的频谱特性存在根本性的不同,造成其参考信号和控制难点具有较大的差异,因此需要对两种参考信号采取不同方式的获取。
7、对宽带噪声进行实时控制时,由于未来时刻的初级噪声无法预测,必须保证整个控制系统的因果性;一方面参考信号必须超前于误差麦克风处次级噪声信号;另一方面,次级信号在控制器与次级通路中的产生的总延迟必须小于等于初级路径的总延迟,即在误差麦克风处的次级噪声不能滞后于初级噪声,否则控制系统将起不到控制效果。因此必须优化算法及软硬件控制结构使控制系统降低计算复杂度、提升收敛速度和增强控制稳定性。
8、针对目前车内窄带阶次噪声消除多采用传统主动噪声控制技术,以实现最大降噪量为目的,但却无法从根源实现噪声的完全消除,因此需要开发既能满足车内阶次窄带噪声主动声整形又能满足宽带随机路噪的自适应降噪技术。
9、目前针对路噪和发动机噪声控制已有大量的研究,并逐步实用化,但大多是将两种控制方式分开研究或运用,无法兼顾两种控制方式在实车集成应用的优势。
10、目前anc系统多采用传统滤波-x最小均方(fxlms)算法,此种方式存在计算复杂度高、收敛速度慢、稳定性差的缺点。
技术实现思路
1、为了解决上述技术问题,本发明提供一种应用于增程式电动汽车的宽窄带混合集成式主动噪声控制系统及方法,能够解决车内不同行驶状态条件下的噪声声品质主动控制无法实车集成控制的问题,利用不同噪声控制模式实现车内宽窄带噪声的自适应控制从根源实现路噪和车内噪声的完全消除。
2、进一步,本发明的还能降低这种控制系统的计算复杂度、提升收敛速度和增强控制稳定性。对系统硬件设备进行相应优化布置,使控制器的计算效率和资源占比更加高效。
3、本发明所采用的技术方案是:
4、一种宽窄带混合集成式主动噪声控制系统,其特征在于包括:
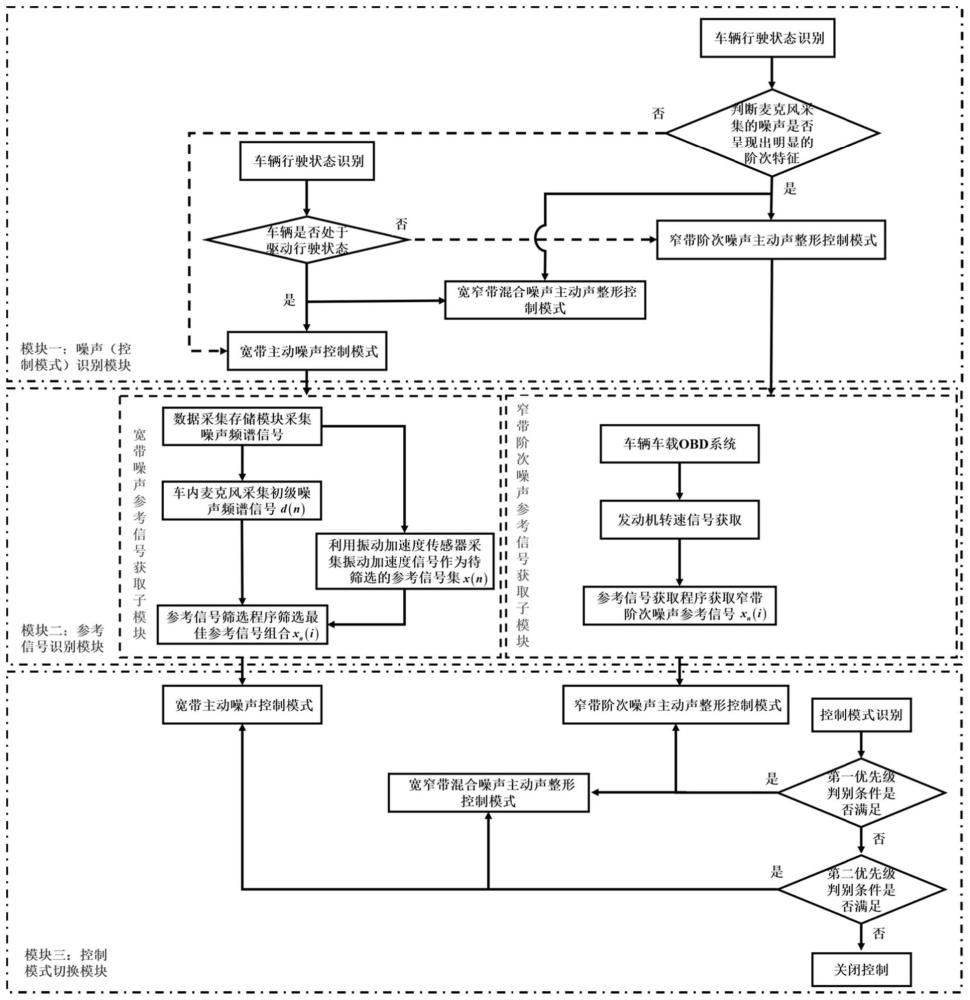
5、噪声控制模式识别模块,用于根据识别车内噪声主成分是否具有明显阶次特征,且是否处于驱动行驶状态,来判别车辆采用何种控制模式;若具有明显的阶次特征且车辆处于怠速状态,适用窄带阶次噪声主动声整形控制模式;若车内噪声主成分未检查出明显阶次成分且汽车处于驱动行驶状态,适用宽带主动噪声控制模式;若车内噪声成分具有明显的阶次特征且车辆处于驱动行驶状态,适用宽窄带混合噪声主动声整形控制模式;若车辆未能满足上述条件则关闭控制;
6、参考信号识别模块,用于采集车内宽带噪声的参考信号和车内窄带阶次噪声的参考信号,并进行转换形成系统参考信号;
7、控制模式切换模块,用于根据参考信号和噪声控制模式识别模块识别的控制模式进行切换操作。
8、上述技术方案中,参考信号识别模块包括宽带噪声参考信号获取子模块、窄带阶次噪声参考信号获取子模块,窄带阶次噪声参考信号获取子模块用于窄带阶次噪声主动声整形控制模式下,将采集的发动机转速信号转换为参考信号;宽带噪声参考信号获取子模块用于宽带主动噪声控制模式下,将振动加速度信号转为电信号作为参考信号;对于宽窄带混合噪声主动声整形控制模式则需要将两种参考信号同时作为系统的参考信号。
9、上述技术方案中,宽带噪声参考信号获取子模块用于首先对车内待筛选的参考信号集快速筛选出与目标降噪点处最大降噪的参考信号组合,并将筛选后的振动加速度传感器采集的振动加速度信号转为电信号作为参考信号;其中,利用布置的振动加速度传感器采集振动加速度信号作为待筛选参考信号集;利用各个座椅处的头枕降噪系统中的麦克风采集车内噪声频谱信号,作为初级信号,待筛选参考信号集和初级信号均作为筛选信号的输入。
10、本发明还提供一种宽窄带混合集成式主动噪声控制方法,其特征在于,至少包括如下步骤:
11、判别车内噪声主成分是否具有明显的阶次特征,以识别具体控制模式,判别方法采用阶次跟踪等数字信号处理技术;
12、根据噪声控制模式识别模块识别出的具体控制模式,确定参考信号筛选方式用于噪声控制模式切换模块;
13、判别车内噪声主成分是否具有明显的阶次特征以及车辆是否处于驱动行驶状态,以识别具体控制模式;
14、根据噪声控制模式识别模块识别出的具体控制模式,并以此确定参考信号筛选方式,利用控制模式切换模块对三种控制模式进行切换;
15、根据噪声控制模式识别结果,实现窄带阶次噪声主动声整形控制模式、宽带主动噪声控制模式以及宽窄带混合噪声主动声整形控制模式三种模式切换:若具有明显的阶次特征且车辆处于怠速状态,适用窄带阶次噪声主动声整形控制模式;若车内噪声主成分未检查出明显阶次成分且汽车处于驱动行驶状态,适用宽带主动噪声控制模式;若车内噪声成分具有明显的阶次特征且车辆处于驱动行驶状态,适用宽窄带混合噪声主动声整形控制模式;若车辆未能满足上述条件则关闭控制。
16、上述技术方案中,切换到相应的控制模式的切换逻辑为:第一优先级判别条件为判别是否满足窄带阶次噪声主动声整形控制模式;第二优先级判别条件为在不满足窄带阶次噪声主动声整形控制模式判别条件时,则判别是否满足宽带主动噪声控制模式判别条件;若以上判别条件均满足则采用宽窄带混合噪声主动声整形控制模式;若以上判别条件均不满足,则直接关闭主动噪声控制系统。
17、上述技术方案中,窄带阶次噪声主动声整形控制模式下,将采集的发动机转速信号转换为参考信号;宽带主动噪声控制模式下,将振动加速度信号转为电信号作为参考信号;对于宽窄带混合主动噪声控制模式则需要将两种参考信号同时作为系统的参考信号。
18、上述技术方案中,将布置在底盘上的振动加速度传感器采集振动加速度信号作为待筛选参考信号集;将各个座椅处的头枕降噪系统中的麦克风采集车内噪声频谱信号作为初级信号,这两组信号作为筛选信号的输入。利用多重相干法对车内待筛选的参考信号集快速筛选出与目标降噪点处具有最大多重相干性的参考信号组合。
19、上述技术方案中,宽带噪声主动声整形控制模式下,通过对参考信号与初级噪声信号之间的相干性来对参考信号进行筛选时,采用传递路径分析法、多重相干分析法、维纳滤波法中的至少一种方法;窄带阶次噪声主动声整形控制模式则利用转速传感器通过车载obd系统读取发动机转速,并根据转速与频率转换关系即可得到参考信号。
20、上述技术方案中,三种控制模式均采用2×2×2多通道多目标控制区域集中分布式控制方式;
21、其中一个2×2以车舱内前排两个位置为目标降噪点,并且此两个位置的次级通路以耦合的形式存在,另一个2×2以车舱内后排两个位置为目标降噪点,并且此两个位置的次级通路以耦合的形式存在,即分别以前后排2×2集中式形成整体的2×2×2集中分布式控制方式。
22、上述技术方案中,三种控制模式采用宽窄带混合噪声主动声整形控制算法,该算法包含三个子系统:正弦消噪子系统、窄带阶次噪声主动声整形子系统、宽带主动噪声消除子系统,其中窄带阶次噪声主动声整形子系统采用多重双权重自适应陷波fxlms算法结合局部次级通路估计法并行控制各个声音分量,宽带主动噪声控制子系统采用无延迟时频域fxlms算法。
23、由于宽窄带混合集成式主动噪声控制方法采用一种宽窄带混合主动声整形控制算法对车内三种噪声模式进行控制,因此,为保证在各个控制模式下算法具有较好的算法计算复杂度和控制控制效果,需要对算法内部算法逻辑做相应的改进。该算法包含三个子系统分别为正弦消噪子系统(snc)、窄带阶次主动声整形子系统(nasp)、宽带主动噪声消除子系统(banc),其控制逻辑为当控制模式判别为窄带阶次主动声整形控制模式时,此时算法只有nasp子系统控制程序被使用,其他子系统则通过程序逻辑判断使其功能失效;当控制模式判别为宽带主动噪声控制模式时,此时算法只有banc子系统控制程序被使用,其他子系统则通过程序逻辑判断使其功能失效;当控制模式判别为宽窄带混合噪声主动声整形控制模式时,此时算法整个系统控制程序被使用。
24、本发明公开了一种宽窄带混合集成式主动噪声控制系统及方法,包括判别车内噪声主成分是否具有明显的阶次特征和是否处于驱动行驶状态,以确定是否适用窄带阶次噪声主动声整形控制模式、宽带主动噪声控制模式、宽窄带混合噪声主动声整形控制模式中的一种模式;若车辆未能满足上述判别条件则关闭控制。能够解决车内不同行驶状态条件下的噪声声品质主动控制无法实车集成控制的问题,利用不同噪声控制模式实现车内宽窄带噪声的自适应控制。为了降低该控制系统的计算复杂度、提升收敛速度和增强控制稳定性,对系统硬件设备进行相应优化布置,使控制器的计算效率和资源占比更加高效。
25、相对于现有技术,本发明产生的有益效果是:
26、为解决车内不同行驶状态条件下的噪声主动控制无法实车集成控制的问题,本专利采用三合一集成式主动噪声控制系统,对车内发动机窄带噪声和宽带路噪两种噪声进行主动噪声控制,通过设置不同优先级判别条件来对控制模式进行准确判别,以此根据车内噪声成分的不同对控制模式进行切换,实现对车内三种噪声的自适应控制。
27、为了降低控制系统的计算复杂度、提升收敛速度和增强控制稳定性,本专利对现有的算法进行优化改进并且对算法结构进行进一步优化,同时对系统硬件设备进行相应优化布置,使控制器的计算效率和资源占比更加高效。
28、目前anc系统多采用传统滤波-x最小均方(fxlms)算法,此种方式存在计算复杂度高、收敛速度慢、稳定性差的缺点。本发明采用一种高计算效率的时频域宽窄带混合主动声整形自适应控制技术,此种算法在发动机产生的阶次声整形设计和路噪宽带随机噪声主动降噪均有显著效果,且相比于传统的fxlms算法能够显著的降低算法计算复杂度,将此算法作为本发明的控制算法程序与本发明控制逻辑旗鼓相当。
本文地址:https://www.jishuxx.com/zhuanli/20240618/21483.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表