一种基于无人机噪声检测的声纹识别方法及系统与流程
- 国知局
- 2024-06-21 11:37:02
本发明属于无人机噪声检测,具体涉及一种基于无人机噪声检测的声纹识别方法及系统。
背景技术:
1、无人机技术的快速发展为许多领域带来了巨大的便利和创新,然而无人机的使用也带来了一些问题,其中之一就是无人机噪声对周围环境和人们的生活造成的干扰,为了减少无人机噪声对环境和社区的影响,对于无人机进行噪声检测和识别显然是十分必要的,声纹识别作为一种生物特征识别技术,通过分析和比对声音信号中的信号特征,可以实现对无人机的认证和识别,可以为无人机的噪声管理和监管提供有效的手段。
2、现有技术中,在对无人机进行噪声检测时,为避免环境噪声的影响,通常只是单一的针对无人机进行检测,但是无人机在实际应用中会爬升到高空区域,其发出的噪声向人们生活区域中传播时会相应的衰减,衰减后的噪声可能并不会对人们生活造成影响,但是衰减后的噪声还可能与环境噪声进行叠加,其也是导致人们受到噪声影响的原因之一,基于此,本发明提供了一种基于环境噪声和无人机噪声结合分析的噪声检测方法。
技术实现思路
1、为解决现有技术中存在的不足,本发明提供一种基于无人机噪声检测的声纹识别方法及系统,能够对无人机的声纹进行识别,从而确定其实际发出的分贝数,同时还能够检测到无人机分贝值的衰减趋势,再结合环境噪声实现对无人机输出分贝的优化。
2、本发明采用如下的技术方案。
3、一种基于无人机噪声检测的声纹识别方法,包括:
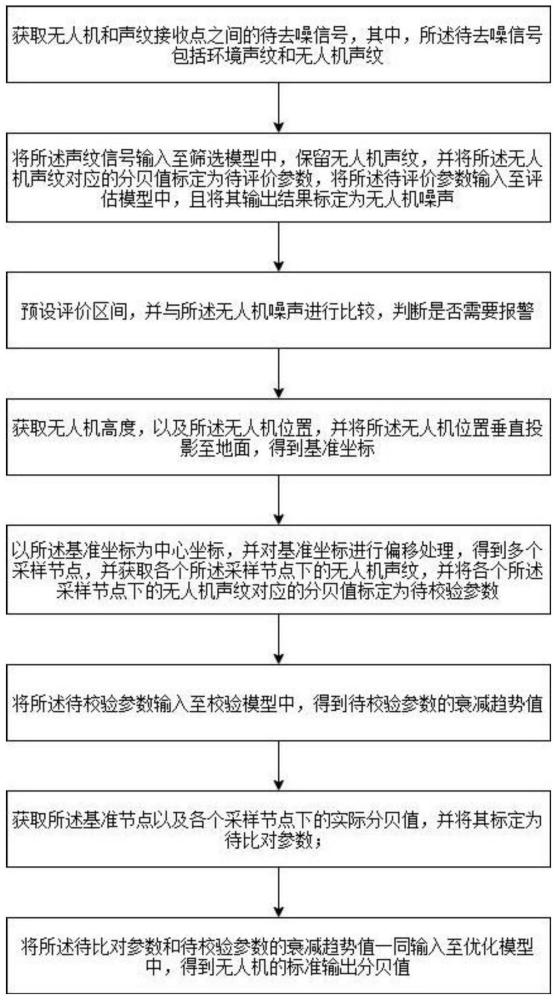
4、获取无人机和声纹接收点之间的声纹信号,其中,所述声纹信号包括环境声纹和无人机声纹;
5、将所述声纹信号输入至筛选模型中,筛除环境声纹,保留无人机声纹,并将所述无人机声纹对应的分贝值标定为待评价参数;
6、预设评价区间,并与所述待评价参数进行比较;
7、若所述无人机噪声未处于评价区间内,则表明所述无人机需要报警,并同步发出报警信号;
8、若所述无人机噪声处于评价区间内,则表明所述无人机无需报警;
9、获取无人机高度,以及所述无人机位置,并将所述无人机位置垂直投影至地面,得到基准坐标;
10、以所述基准坐标为中心坐标,并对基准坐标进行偏移处理,得到多个采样节点,并获取各个所述采样节点下的无人机声纹,并将各个所述采样节点下的无人机声纹对应的分贝值标定为待校验参数;
11、将所述待校验参数输入至校验模型中,得到待校验参数的衰减趋势值;
12、获取所述基准节点以及各个采样节点下的实际分贝值,并将其标定为待比对参数;
13、将所述待比对参数和待校验参数的衰减趋势值一同输入至优化模型中,得到无人机的标准输出分贝值。
14、在一种优选方案中,所述将所述声纹信号输入至筛选模型中,筛除环境声纹,保留无人机声纹的步骤,包括:
15、获取声纹信号,并将其标定为待去噪信号;
16、重构所述待去噪信号,得到一级重构矩阵,并对所述一级重构矩阵进行奇异值分解,得到奇异值数据集;
17、从所述筛选模型中获取主频数量,并依据所述主频数量从所述奇异值数据集中选取多个奇异值,且将其标定为主奇异值,并将其同步筛除,并将其它奇异值标定为待评价参数;
18、将所述待评价参数输入至评估模型中,且将其输出结果标定为无人机噪声。
19、在一种优选方案中,所述获取主频数量时,通过对待去噪信号执行傅里叶变换得到,且以所述主频数量的二倍作为选取主奇异值时的有效秩的阶次。
20、在一种优选方案中,所述将所述待评价参数输入至评估模型中,且将其输出结果标定为无人机噪声的步骤,包括:
21、获取待评价参数,并对其进行重置处理,得到二级重构矩阵;
22、将所述二级重构矩阵中的元素标定为基准参数;
23、从所述评估模型中调用评估函数;
24、将所述基准参数输入至评估函数中,并将其输出结果标定为无人机噪声。
25、在一种优选方案中,所述以所述基准坐标为中心坐标,并对基准坐标进行偏移处理,得到多个采样节点的步骤,包括:
26、获取基准坐标,以及所述基准坐标下的无人机声纹;
27、获取预偏移参数,并依据其对基准坐标执行多次偏移处理,得到多个待校验坐标;
28、以所述基准坐标开始,逐一统计各个所述待校验坐标下的无人机声纹,且以首次出现无人机声纹为零的待校验坐标结束,并将该坐标标定为边缘坐标;
29、获取所述基准坐标与边缘坐标之间的待校验坐标数量,并将其标定为待核准参数;
30、获取核准阈值,并与所述待核准参数进行比较;
31、若所述待核准参数小于统计阈值,则表明预偏移参数无效,并将所述基准坐标与边缘坐标输入至调控模型中,得到标准偏移参数;
32、若所述待核准参数大于或等于统计阈值,则表明所述预偏移参数有效,并将其对应的待校验坐标和边缘坐标对应的节点标定为采样节点。
33、在一种优选方案中,所述将所述基准坐标与边缘坐标输入至调控模型中,得到标准偏移参数的步骤,包括:
34、获取基准坐标与边缘坐标;
35、从所述调控模型中调用调控函数;
36、将所述基准坐标和边缘坐标输入至调控函数中,且将其输出结果标定为标准偏移参数,再将所述基准坐标依据标准偏移参数执行偏移处理,且将偏移结果标定为采样节点。
37、在一种优选方案中,所述将所述待校验参数输入至校验模型中,得到待校验参数的衰减趋势值的步骤,包括:
38、获取各个所述采样节点下的待校验参数;
39、从所述校验模型中调用校验函数;
40、将所有所述待校验参数输入至校验函数中,且将其输出结果标定为待校验参数的衰减趋势值。
41、在一种优选方案中,所述将所述待比对参数和待校验参数的衰减趋势值一同输入至优化模型中,得到无人机的标准输出分贝值的步骤,包括:
42、获取待比对参数与待校验参数的衰减趋势值;
43、从所述优化模型中调用优化函数;
44、将取值最小且未处于所述评价区间内的待比对参数、待检验参数的衰减趋势值输入至优化函数中,再将其输出结果标定为无人机的标准输出分贝值。
45、本发明还提供了,一种基于无人机噪声检测的声纹识别系统,应用于上述的基于无人机噪声检测的声纹识别方法,包括:
46、第一获取模块,所述第一获取模块用于获取无人机和声纹接收点之间的声纹信号,其中,所述声纹信号包括环境声纹和无人机声纹;
47、筛选模块,所述筛选模块用于将所述声纹信号输入至筛选模型中,筛除环境声纹,保留无人机声纹,并将所述无人机声纹对应的分贝值标定为待评价参数;
48、评价模块,所述评价模块用于获取评价区间,并与所述待评价参数进行比较;
49、若所述待评价参数未处于评价区间内,则表明所述无人机发出噪声信号,并同步发出报警信号;
50、若所述待评价参数处于评价区间内,则表明所述无人机声未发出噪声信号;
51、投影模块,所述投影模块用于获取无人机高度,以及所述无人机位置,并将所述无人机位置垂直投影至地面,得到基准坐标;
52、偏移模块,所述偏移模块用于以所述基准坐标为中心坐标,并进行偏移处理,得到多个采样节点,并获取各个所述采样节点下的无人机声纹,并将各个所述采样节点下的无人机声纹对应的分贝值标定为待校验参数;
53、校验模块,所述校验模块用于将所述待校验参数输入至校验模型中,得到待校验参数的衰减趋势值;
54、第二获取模块,所述第二获取模块用于获取所述基准节点以及各个采样节点下的实际分贝值,并将其标定为待比对参数;
55、优化模块,所述优化模块用于将所述待比对参数和待校验参数的衰减趋势值一同输入至优化模型中,得到无人机的标准输出分贝值。
56、以及,一种基于无人机噪声检测的声纹识别终端,包括:
57、至少一个处理器;
58、以及与所述至少一个处理器通信连接的存储器;
59、其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的基于无人机噪声检测的声纹识别方法。
60、本发明的有益效果在于,与现有技术相比,本发明能够对无人机的声纹进行识别,对环境噪声进行剔除,从而便可确定无人机实际发出的分贝数,再将无人机升空,对其声纹覆盖区域进行检测,并结合校验模型来确定无人机发出声音并抵达地面后的衰减趋势值,从而有效的确定实际叠加至人们日常生活中的实际分贝,最后通过优化模型结合环境噪声实现对无人机输出分贝的优化,保证无人机正常运行的同时,还不会对人们日常生活造成干扰。
本文地址:https://www.jishuxx.com/zhuanli/20240618/22457.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表