一种电动机噪声主动抑制方法
- 国知局
- 2024-06-21 11:40:38
本发明涉及电机噪声抑制领域,更具体的说是一种电动机噪声主动抑制方法。
背景技术:
1、电动机被广泛应用于生产生活各个领域,例如大型工业设备(风机、水泵、机床)、交通工具(飞机、汽车、电动自行车)和家用电器(冰箱、洗衣机、空调)等。电动机噪声过大会影响人们的正常生产生活,例如:大型工业设备驱动电机噪声过大会对作业者听力造成损害,电动汽车驱动电机的噪声会影响驾驶员驾驶安全,家用电器中电机的噪声会对居住环境产生负面影响,等等。因此,电动机的噪声抑制越来越受到人们的关注。
2、噪声抑制方法分为噪声被动抑制方法和噪声主动抑制方法。噪声被动抑制方法是通过具有吸声、消声或隔声功能的材料来阻断噪声传播路径,以达到抑制噪声的目的,这种方法往往设计复杂、成本高且不易布置,此外,噪声被动抑制方法一般对低频噪声抑制效果较差。噪声主动抑制方法是通过产生与噪声幅值相同、相位相反的次级噪声信号来抵消噪声,因此,噪声主动抑制方法对低频噪声抑制效果较好,且这种方法成本低、易于布置。噪声主动抑制系统通常包括参考麦克风、误差麦克风、次级扬声器和控制器。传统噪声主动抑制方法为:参考麦克风用于采集初级噪声信号,误差麦克风用于采集误差噪声信号,控制器采用最小均方算法计算次级噪声信号,次级扬声器用于发出次级噪声信号来抵消初级噪声。
3、在理想条件下,次级扬声器发出的次级噪声信号只要满足与初级噪声信号同幅、同频、反相位即可完美抵消初级噪声。然而,由于系统延迟(包括软件和硬件)是不可避免的,系统生成的次级噪声信号与理想的次级噪声信号往往存在相位差,导致系统降噪量下降,且初级噪声信号频率越高,这种影响越明显。因此,噪声主动抑制对高频噪声抑制效果较差。电动机噪声不仅包含低频噪声,而且包含高频噪声,其噪声不同频率成分的相位也不尽相同;导致上述现有的噪声主动抑制方法存在对电动机中高频噪声抑制效果较差的缺陷。
技术实现思路
1、本发明的目的是解决上述现有噪声主动抑制方法对电动机中高频噪声抑制效果较差的缺陷,提供一种可以精确识别电动机噪声关键频率成分,可以有效抑制电动机中的低频噪声和高频噪声,电动机噪声的整体抑制效果好的电动机噪声主动抑制方法。
2、本发明解决上述现有技术缺陷所采用的技术方案是:
3、一种电动机噪声主动抑制方法,其特征在于,包括以下步骤:
4、步骤1:采集电动机噪声并对电动机噪声进行频谱分析,在所需抑制的噪声频率范围内对各频率分量的幅值排序并提取具有较大幅值的频率分量;
5、具体步骤如下:
6、1.1通过参考麦克风采集电动机运转时的噪声,采样频率为fs,噪声信号记为x,x=[x1,x2,x3,…,xn]t,n为正整数,[]t表示矩阵转置;
7、1.2对采集的电动机噪声数据x进行快速傅里叶变换,得到电动机噪声幅频特性,记为a(f),a为快速傅里叶变换后的噪声幅值,a=[a1,a2,a3,…,an]t,f为快速傅里叶变换后的噪声频率,f=[f1,f2,f3,…,fn]t,n为正整数,快速傅里叶变换后的最大频率遵循采样定理;
8、1.3设置噪声抑制频率范围,该频率范围记为fl~fh,fl为噪声抑制频率下限,fh为噪声抑制频率上限,满足f1≤fl<fh≤fn;
9、1.4提取噪声抑制频率范围内的所有频率分量对应的噪声幅值,
10、即:[al,al+1,al+2,…,ai,…,ah-2,ah-1,ah]t,
11、对应频率为:[fl,fl+1,fl+2,…,fi,…,fh-2,fh-1,fh]t,l<i<h,i、l和h均为正整数;
12、1.5按照噪声抑制频率范围内的各频率分量对应的噪声幅值从大到小的顺序排列,排序后噪声抑制频率范围内的各频率分量对应的噪声幅值重新记为其中,对应频率记为
13、1.6设置所需抑制的噪声频率分量的数量,记为j,0<j≤(h-l+1)且j为正整数;
14、1.7提取前j个噪声频率分量、获得其对应的幅值和频率,前j个噪声频率分量的幅值为记为幅值向量as,对应频率为记为频率向量fs,即:
15、
16、
17、步骤2:为提取的噪声抑制频率范围内的电动机噪声各个频率分量设置相位偏移,根据所提取的各个噪声频率分量的幅值、频率和相位生成各个噪声频率分量的单频次级噪声信号,并进一步生成多频次级噪声信号;
18、具体步骤如下:
19、2.1为步骤1.7中所提取的各个噪声频率分量设置初始相位偏移,初始相位偏移可在[-2π,2π]范围内随意取值,通常设置为0,各个噪声频率分量对应的初始相位偏移为记为初始相位向量θs,即:
20、
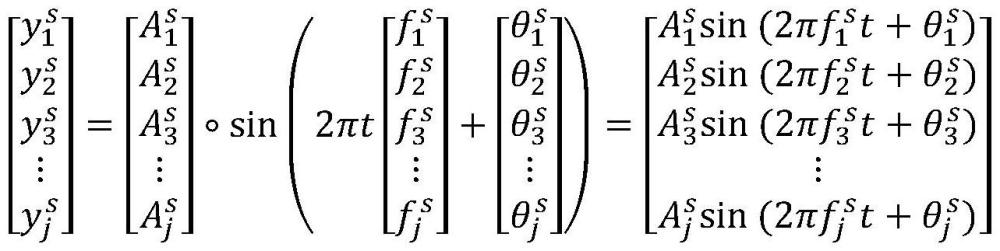
21、2.2根据步骤1.7中所提取的各个噪声频率分量的幅值和频率,以及步骤2.1中所设置的初始相位偏移,生成各个噪声频率分量的初始单频次级噪声信号,这些初始单频次级噪声信号可由下式计算得到:
22、
23、其中,ys为初始单频次级噪声信号向量,表示哈达玛积,即:
24、
25、2.3将2.2中各个噪声频率分量的初始单频次级噪声信号叠加生成初始多频次级噪声信号,即将初始单频噪声信号向量中各元素求和:
26、
27、其中,ys为初始多频次级噪声信号,为初始单频次级噪声信号,m为正整数且1≤m≤j,t为时间;
28、步骤3:播放次级噪声,同时采集误差噪声,以误差噪声信号的欧几里得范数为代价函数,利用人工智能优化算法找到次级噪声信号各频率分量的最优相位偏移,并生成最优次级噪声信号;
29、具体步骤如下:
30、3.1将步骤2.3中生成的多频次级噪声信号ys按照采样频率fs(采样间隔)离散化、获得次级噪声信号y,并利用次级扬声器播放次级噪声信号y,y=[y1,y2,y3,…,yn]t;
31、3.2利用误差麦克风采集误差噪声信号,误差噪声信号为电动机发出的初级噪声信号与次级扬声器发出的次级噪声信号的叠加,即:
32、e=x+y
33、其中,e为误差噪声信号,e=[e1,e2,e3,…,en]t,x为初级噪声信号,y为次级噪声信号;
34、3.3计算误差噪声信号的欧几里得范数,并将其作为代价函数,即:
35、ψ=‖e‖
36、其中,ψ为代价函数,e为误差噪声信号,‖‖表示欧几里得范数;
37、3.4以步骤2.1中各个噪声频率分量的初始相位偏移为输入变量,以步骤3.3中计算的代价函数为输出变量,通过优化算法找到能够使得输出变量达到最小的输入变量的取值,此多输入单输出的最优化问题可表示为:
38、minimizeψ(θs)
39、
40、其中,优化算法可采用人工智能算法,如遗传算法、粒子群优化算法、神经网络和支持向量机;
41、3.5输出步骤3.4中计算的输入变量的最优值,即为最优相位偏移,最优相位偏移记为θopt,将步骤2.2中初始相位偏移θs替换为最优相位偏移θopt,重新生成各个噪声频率分量的最优单频次级噪声信号,这些最优单频次级噪声信号可由下式计算得到:
42、
43、其中,yopt为最优单频次级噪声信号向量,表示哈达玛积,即:
44、
45、3.6将步骤3.5中更新后的各个噪声频率分量的最优单频次级噪声信号叠加生成最优多频次级噪声信号,即将最优单频噪声信号向量中各元素求和:
46、
47、其中,yopt为最优多频次级噪声信号,为最优单频次级噪声信号,m为正整数且1≤m≤j,t为时间;
48、步骤4:将步骤3.6中生成的最优次级噪声信号yopt按照采样频率fs(采样间隔)离散化、获得最优次级噪声信号y′,并利用次级扬声器播放最优次级噪声信号y′。y=y′=[y′1,y′2,y′3,…,y′n]t,此时,可保证在设置条件不变的情况下,误差噪声达到最小。
49、使用本发明“一种电动机噪声主动抑制方法”,一方面,可以精确识别电动机噪声关键频率成分,通过人工智能方法获取次级噪声信号最优相位并直接在时域中合成最优次级噪声信号,实现快速、有效的窄带噪声控制;另一方面,增大噪声抑制频率范围和抑制频率数量可以实现宽带噪声控制,且能有效弥补传统的噪声主动抑制方法对中高频噪声降噪效果差的缺陷。总之,该方法不仅可以抑制电动机低频噪声,而且可以有效抑制电动机高频噪声,从而进一步提高电动机噪声的整体降噪量。
本文地址:https://www.jishuxx.com/zhuanli/20240618/22841.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表