一种基于广义熵的欧氏方向搜索的有源噪声控制方法
- 国知局
- 2024-06-21 11:43:29
本发明涉及噪声控制技术,具体涉及一种基于广义熵的欧氏方向搜索的有源(主动)噪声控制方法。
背景技术:
1、随着科学技术的发展,噪声问题日益突出,由噪声问题引发的问题越来越严重。如:机械引擎,变压器等自动化设备会产生噪声,电子设备也会产生噪声,这些噪声既可能对通信或自动控制系统造成干扰,也会对人听觉方面的健康带来危害。
2、对噪声的抑制或控制,目前有被动噪声控制和有源(主动)噪声控制两种方法:
3、传统的被动噪声控制方法有隔离,增添障碍物,消声器等方法。这些方法造价昂贵,同时抑制低频噪声的效果不显著。与传统被动噪声控制方法相比较之下,主动噪声控制(active noise control,anc)系统,由于其较低的造价成本,且实现有效的去噪性能(尤其是低频噪声),近年来得到了广泛的关注。
4、主动噪声控制系统消除噪声的基本原理是由控制器产生一个与原始噪声幅度、频率相同,但相位相反的噪声,从而达到消除噪声的目的。在一个主动噪声控制系统中,参考麦克风用于拾取噪声源的原始噪声(初级噪声),控制器通常是一个自适应滤波器,自适应滤波器对噪声信号滤波后通过扬声器输出一个反向噪声(次级噪声);误差麦克风用于拾取噪声消除点的残差信号(初级噪声与次级噪声抵消后的误差信号),该残差信号用于主动噪声控制器的修正。从噪声源到噪声消除点的路径称为主级通路,噪声源经控制器到扬声器的路径称为次级通路。
5、在自适应有源噪声控制方法中,滤波-x最小均方(fxlms)算法以其良好的鲁棒性和简单的结构得到了最为广泛的应用。然而,当初级噪声为α稳定分布的冲击噪声时,fxlms算法会产生不收敛的情况。为了避免这一缺陷,一些改进方法被相继提出,较成熟的方法主要有以下两种:
6、(1)滤波-x最大熵(fxmcc)方法
7、如文献1“n c kurian,k patel,and n v george.robust active noisecontrol:an information theoretic learning approach.in:appl.acoust.,vol.117;pp.180–184.”。该方法是将滤波最大熵(fxmcc)算法引入在有源噪声系统中,提高算法在抗冲击噪声方面的性能,进一步提高了算法的稳定性。但是该方法在某些强冲击噪声下不够稳定,降低了算法的适用范围。
8、(2)滤波-x递归最小二乘(fxrmc)方法
9、如文献2“l lu and h zhao.active impulsive noise control using maximumcorrentropy with adaptive kernel size.in:mech.syst.signal process,vol.87;pp.180–191.”。该文献提出了一种鲁棒的fxrmc的抑制噪声方法。提高了算法整体的收敛速度和稳定性,但是该算法有较大的计算复杂度。
技术实现思路
1、本发明所要解决的技术问题是:提出一种基于广义熵的欧氏方向搜索的有源噪声控制方法,解决传统自适应有源噪声控制方法中,在强冲击噪声下不够稳定、计算复杂度高的问题。
2、本发明解决上述技术问题采用的技术方案是:
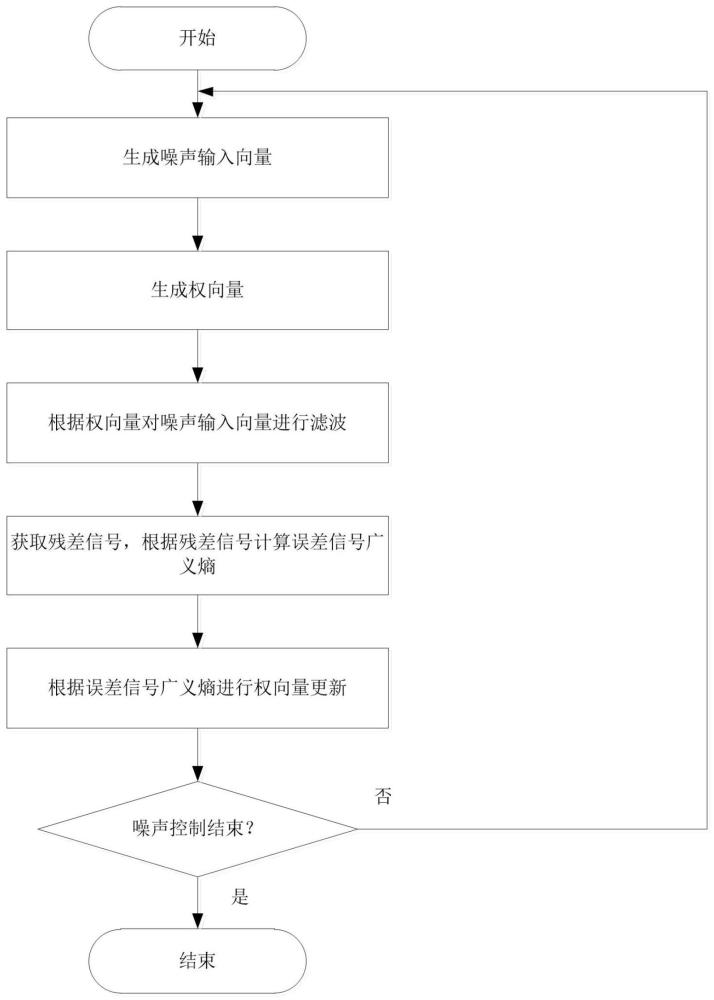
3、一种基于广义熵的欧氏方向搜索的有源噪声控制方法,应用于包括参考麦克风、滤波器、误差麦克风和扬声器的有源噪声控制系统中,该方法包括以下步骤:
4、s1、生成噪声输入向量:
5、参考麦克风拾取噪声源当前时刻n产生的初级噪声x(n);
6、将当前时刻n和前m-1个时刻共计m个初级噪声x(n),x(n-1)...,x(n-m+1)构成滤波器当前时刻n的噪声输入量x(n):
7、x(n)=[x(n),x(n-1)...,x(n-m+1)]t;
8、其中,m=192,是滤波器的抽头数,上标t表示转置;
9、s2、生成权向量:
10、滤波器生成当前时刻n和前m-1个时刻的权系数w(n),w(n-1)…w(n-m+1),并将这m个权系数构成当前时刻n的权系数向量w(n):
11、w(n)=[w(n),w(n-1),...,w(n-m+1)]t;在当前时刻n=0时,w(n)=0;
12、s3、根据权向量对噪声输入向量进行滤波:
13、滤波器根据当前时刻n的权系数向量w(n)对当前时刻n的噪声输入向量x(n)进行滤波,得到当前时刻n输出到扬声器的输出值
14、
15、其中,符号*表示卷积运算,s表示噪声源经滤波器到扬声器的次级通路的脉冲响应;
16、s4、获取残差信号,根据残差信号计算误差信号广义熵:
17、误差麦克风拾取出噪声消除点在当前时刻n的声音信号,即当前时刻n的残差信号e(n);
18、滤波器计算出当前时刻n的残差信号e(n)的广义熵γ(n):
19、γ(n)=exp{-σ|e(n)|p}|e(n)|p-2sign(e(n));
20、其中,exp表示指数运算;σ为核函数的核宽度值;p为分布的分散性参数;
21、s5、根据误差信号广义熵进行权向量更新:
22、首先,滤波器生成当前时刻n的输入向量的自相关矩阵ψ(n),以及输入向量和期望响应的互相关向量v(n):
23、
24、
25、其中,λ表示遗忘因子;xs(k)为通过次级路径后的输入信号,表示对噪声源经滤波器到扬声器的次级通路的脉冲响应s的估计值;d(k)为初级噪声x(k)通过次级通路s的输出;
26、然后,滤波器算出下一时刻(n+1)的权向量w(n+1):
27、w(n+1)=w(n)+ρ(n)gi,
28、其中gi=[0,...1,...,0]t为欧氏距离;
29、s6、令n=n+1,返回步骤s1,直至噪声控制结束。
30、进一步的,遗忘因子λ的取值范围为0.9~1之间。
31、本发明的有益效果是:
32、(1)本发明通过对残差信号进行广义熵递归运算,其中,广义熵函数基于高阶矩统计,因此,本发明对噪声信号有着相较于二阶矩有着更好的信息采集、追踪能力,尤其对含有各种高阶信号的冲击噪声有着非常稳定的去噪性能,且收敛速度快。
33、(2)本发明基于最小二乘的欧氏距离算法对权系数向量w(n)进行迭代更新,避免了矩阵求逆运算导致的高计算复杂度的问题,使得算法易于实现。
技术特征:1.一种基于广义熵的欧氏方向搜索的有源噪声控制方法,应用于包括参考麦克风、滤波器、误差麦克风和扬声器的有源噪声控制系统中,其特征在于,该方法包括以下步骤:
2.如权利要求1所述的一种基于广义熵的欧氏方向搜索的有源噪声控制方法,其特征在于,遗忘因子λ的取值范围为0.9~1之间。
技术总结本发明涉及噪声控制技术,其公开了一种基于广义熵的欧氏方向搜索的有源噪声控制方法,解决传统自适应有源噪声控制方法中,在强冲击噪声下不够稳定、计算复杂度高的问题。本发明方案包括:S1、噪声输入向量的生成:将当前时刻n和前M‑1个时刻的M个初级噪声值x(n),x(n‑1)...x(n‑M+1),构成滤波器当前时刻n的噪声输入向量;S2、权向量的生成:滤波器生成当前时刻n和前M‑1个时刻的权系数w(n),w(n‑1)…w(n‑M+1);S3、根据权向量对噪声输入向量进行滤波:滤波器根据当前时刻n的权系数向量对当前时刻n的噪声输入向量X(n)进行滤波得到当前时刻输出到扬声器的输出值S4、获取残差信号,根据残差信号计算误差信号广义熵;S5、根据误差信号广义熵进行权向量更新;S6、令n=n+1,返回步骤S1,直至噪声控制结束。技术研发人员:芦璐,汪杰,朱光亚,尹凯丽,杨晓敏受保护的技术使用者:四川大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240618/23135.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表