一种汽车主动降噪方法、系统和可存储介质与流程
- 国知局
- 2024-06-21 11:45:58
本发明涉及汽车的噪声控制,尤其涉及一种汽车主动降噪方法、系统和可存储介质。
背景技术:
1、主动噪声控制技术是一种有源控制方法,是通过扬声器发出抵消信号,实现目标位置噪声衰减。汽车主动降噪系统通常使用前馈主动降噪算法,对参考信号和误差信号进行实时处理,生成噪声抵消信号驱动扬声器发声,降低目标点噪声水平。
2、传统主动降噪系统中,目标噪声源不同,获取参考信号的方式也不同。例如,发动机主动降噪通过can获取发动机转速信号,合成参考信号;路噪主动降噪在车身或底盘布置加速度传感器,获取参考加速度信号;风噪主动降噪在车外或者车身内布置麦克风获取参考声音信号。因此,针对不同的噪声源,需要使用不同的参考信号,这就意味降低更多类型的车内噪声,参考传感器的个数及类型也会增加。而参考传感器的存在不仅使得系统更加复杂,而且导致主动降噪系统的成本较高,阻碍了该系统的推广和普及。除此以外,目前的主动降噪系统都按照将车内噪声降为0为目标设计,但是在实际的工程应用中,由于系统硬件、次级路径等因素的影响,主动降噪系统不可能将车内噪声降为0,只能降低一部分车内噪声,这就导致降噪后的车内声品质很难受到控制。因此,在减少或不使用参考传感器的情况下,对多种类型噪声融合降噪,同时能控制降噪后车内声品质对于主动降噪系统的发展有着极其重要的意义。
技术实现思路
1、为克服上述缺点,本发明的目的在于提供一种汽车主动降噪方法、系统和可存储介质,相对传统的自适应fxlms降噪系统,不使用参考传感器,就能实现多种类型噪声融合降噪,并能对降噪后车内声进行品质控制。
2、为了达到以上目的,本发明采用的技术方案是:一种汽车主动降噪方法,在车内设置有至少一个误差麦克风,误差麦克风用于实时获取车内噪声信号,所述方法包括:
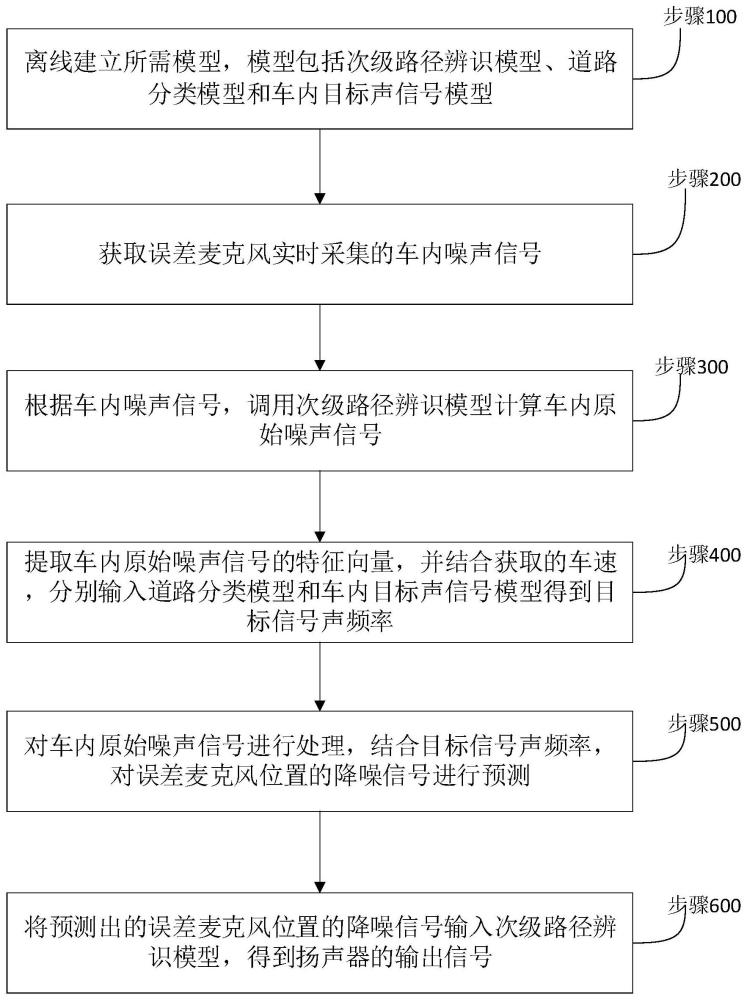
3、离线建立所需模型,所述模型包括次级路径辨识模型、道路分类模型和车内目标声信号模型,其中所述车内目标声信号模型为车速、路面类型和目标信号声频率一一映射的车内目标声信号数据集;
4、获取所述误差麦克风实时采集的车内噪声信号;
5、根据所述车内噪声信号,调用所述次级路径辨识模型计算车内原始噪声信号;
6、提取所述车内原始噪声信号的特征向量,并结合获取的车速,输入所述道路分类模型得到道路分类,并根据所述道路分类和当前车速调用车内目标声信号数据集中的目标信号声频率;
7、对所述车内原始噪声信号进行处理,结合所述目标信号声频率,对误差麦克风位置的降噪信号进行预测;
8、将预测出的所述误差麦克风位置的降噪信号输入次级路径辨识模型,得到扬声器的输出信号。
9、本发明的有益效果在于:
10、一、直接利用车内噪声信号进行降噪信号的预测,避免了使用额外的参考传感器,这样可以降低系统的硬件成本,并简化系统的设计和安装过程。
11、二、通过道路分类模型对当前的路面类型进行分类,并根据分类结果调用相应的目标车内信号,这样可以针对不同类型的噪声提供相应的降噪策略,实现对发动机噪声、路噪、风噪等多种类型噪声的同时降噪。通过对不同类型噪声的有效控制,可以显著提高车内的声音环境质量。
12、三、增加了一个车内目标声信号模型,可以实现对车内噪声的主动控制,通过调整车内目标声信号模型,满足用户的主观感受,以获得更加舒适和愉悦的车内声音环境。
13、四、直接利用车内噪声信号进行降噪信号的预测,避免了复杂的自适应算法和大量的实时计算。降低方法的复杂性,并提高方法的实时性和响应速度。
14、进一步来说,对车内原始噪声信号进行处理,结合目标信号声频率,对误差麦克风位置的降噪信号进行预测具体包括:
15、收集n时刻的车内原始噪声信号及其前n-1个采样点的车内原始噪声信号组成序列y(n),y(n)=[y(n-n),y(n-n+1),...,y(n)],其中y(n)为第n时刻的车内原始噪声信号;
16、对所述序列y(n)中的每个车内原始噪声信号进行时频转换,获得y(n)每个频率f的幅值a(f)和初始相位ph(f);
17、预测延迟时间α秒后,每个频率f的车内原始噪声信号y原始(f)的相位ph’(f),其中α是误差麦克风和扬声器之间信号延迟时间;
18、根据目标信号声频率f目标和相位ph’(f),计算所述误差麦克风位置处每个频率下的抵消信号y抵消(f)的相位ph抵消(f);
19、根据所述抵消信号y抵消(f)的相位ph抵消(f),计算所述误差麦克风位置的降噪信号y抵消(n)。
20、因为当前n时刻扬声器的输出信号,进行降噪后,会在α秒后被误差麦克风采集到车内噪声信号,因此通过当前n时刻以及n时刻前的n个点,来预测误差麦克风在α秒后采集到的车内噪声信号,再通过预测出的α秒后的车内噪声信号反推出当前n时刻扬声器的输出信号。
21、进一步来说,所述相位ph抵消(f)的计算公式为:
22、ph抵消(f)=arccos[y原始(f)-d(f目标,vn,typen)/a(f)];
23、其中y原始(f)=a(f)*cos(ph’(f)),d(f目标,vn,typen)为车内目标声信号数据集,vn为n时刻的车速,typen为n时刻的车内原始噪声信号的特征向量,f目标为n时刻的目标信号声频率。
24、因为原始噪声信号y原始(f)是按座舱内噪音降为0设置的,但实际使用时,本技术根据车速的路面类型,定义了对应的目标信号频率。因此调用数据集d(f目标,v,type),找到需要的目标信号声频率f目标,来计算误差麦克风位置处的抵消信号y抵消(f)的相位ph抵消(f)。
25、进一步来说,所述降噪信号y抵消(n)的计算公式为:
26、其中fmax和fmin分别序列y(n)中频率f的最大值和最小值。
27、进一步来说,所述扬声器的输出信号的计算公式为:
28、
29、其中s(n)为第n时刻扬声器的输出信号,l为正整数且不大于l,l为次级路径识别模型中的时域fir滤波器长度,h(l)为时域fir滤波器的系数。
30、因为降噪信号是扬声器输出的信号经过次级路径后在误差麦克风位置得到的降噪信号,因此还需要将误差麦克风位置的降噪信号y抵消(n)通过次级路径转换为扬声器的输出信号。
31、进一步来说,第n时刻的所述车内原始噪声信号等于第n时刻的车内噪声信号加上扬声器在第n-α时刻的输出信号经过次级路径辨识模型内次级路径的卷积;
32、第n时刻的所述车内原始噪声信号y(n)的计算公式为:
33、
34、其中e(n)为第n时刻的车内噪声信号。
35、由于车内噪声信号e(n)为原始噪声信号y(n)减去扬声器输出的信号s(n-α),则原始噪声信号y(n)等于车内噪声信号e(n)加上扬声器输出的信号s(n-α)经过次级路径的卷积。
36、进一步来说,建立次级路径辨识模型包括,以白噪声信号作为激励,采用lms算法对次级路径的冲击响应函数进行离线识别,辨识得到有限单位脉冲响应的时域表示为时域fir滤波器的系数h(l),其中l为正整数且不大于l,l为时域fir滤波器长度。
37、使用lms算法进行次级路径辨识,通过迭代计算扬声器激励信号和误差麦克风接收信号之间的误差,最终得到次级路径的有限单位脉冲响应,用于后续的主动降噪系统设计和控制。
38、进一步来说,所述道路分类模型用于根据车速和特征向量来预测车辆所处的车面类型,采用支持向量机来进行所述道路分类模型的构建。
39、通过不同的路面车内的噪声水平也不同,因此可以根据车内噪声信号完成路面类型的识别,在离线状态下,建立道路分类模型,实现车速、车内噪声信号的特征向量和路面类型的映射关系。
40、本发明还公开一种汽车主动降噪系统,包括:
41、误差麦克风,所述误差麦克风用于实时采集的车内噪声信号;
42、数字信号处理器,所述数字信号处理器采用上述的降噪方法,以生成扬声器的输出信号;
43、功率放大器,所述功率放大器用于对输出信号进行功率放大;
44、扬声器,所述扬声器在功率放大器的驱动下发声。
45、只需误差麦克风,就能对车内空间进行降噪,降低成本。同时兼容多种类型噪声同时降噪,又可控制声品质,使得主动降噪系统更加实用和高效,能够提供更好的车内声音环境。
46、本发明还公开一种计算机可存储介质,所述计算机可存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的汽车主动降噪方法。
本文地址:https://www.jishuxx.com/zhuanli/20240618/23419.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表