一种多初级声源条件下的虚拟误差信号计算方法
- 国知局
- 2024-06-21 11:46:37
本发明涉及主动降噪,具体的是一种多初级声源条件下的虚拟误差信号计算方法。
背景技术:
1、环境噪声污染引起了全世界的广泛关注,尤其对于经济快速增长、城镇化进程日益加快的发展中国家来说,噪声扰民问题更加突出。长期暴露在高噪声环境下对人的生理和心理健康将造成严重危害,一般性的噪声干扰则会影响人们的正常工作和生活。因而,很多学者对噪声控制进行了研究。
2、传统的噪声控制从噪声源、噪声传播途径和噪声接受者这三方面入手,主要的技术手段包括吸声处理、隔声处理、消声器等。它的噪声控制机理在于使噪声声波与声学材料或结构相互作用从而达到降低噪声的目的,属于无源噪声控制。当噪声信号为低频信号时,无源噪声控制在成本、部署难度和有效性上均有局限。因此,有源/主动噪声控制的提出与发展填补上了这一部分的空白,近年来已发展成为噪声控制中的主要研究方向。有源噪声控制主要利用幅度相等、相位相反的声波相互叠加,使得其彼此相消,达到降噪目的。
3、在一些应用场景中,会出现在所需降噪位置处不宜放置误差传声器的情况,比如智能座椅的头靠系统,误差传声器无法放置在所需降噪的人耳处,只能放在人耳附近,虚拟传感器算法就是针对这种情况产生的。这种算法可以在无法放置误差传声器的期望降噪位置处实现最大程度的降噪,其中远程麦克风方法是较为常用的方法之一。
4、在实际应用中,如何使用观测传声器更好地估计出待降噪位置的误差信号是这类虚拟传感器算法的一大限制。
技术实现思路
1、为解决上述背景技术中提到的不足,本发明的目的在于提供一种多初级声源条件下的虚拟误差信号计算方法,在多初级声源条件下对虚拟误差信号进行较为准确的估计。
2、第一方面,本发明的目的可以通过以下技术方案实现:一种多初级声源条件下的虚拟误差信号计算方法,方法包括以下步骤:
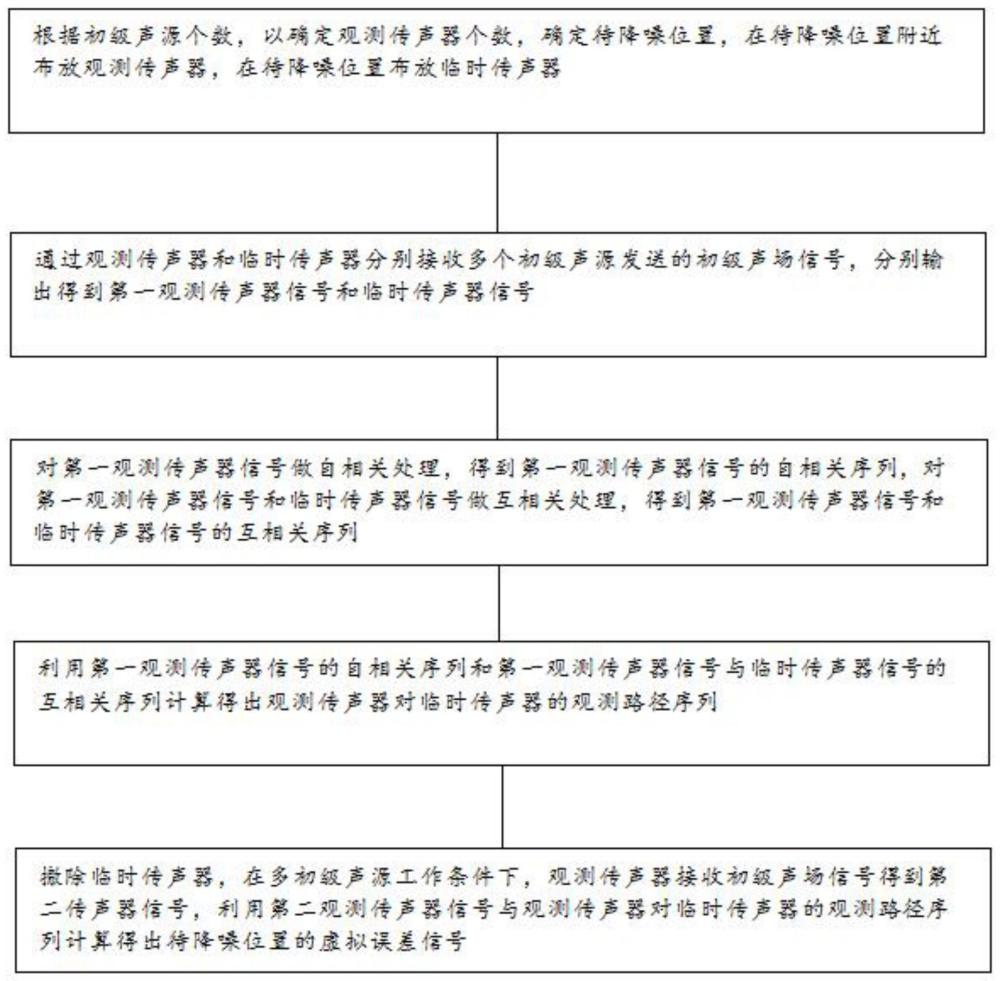
3、根据初级声源个数,以确定观测传声器个数,确定待降噪位置,在待降噪位置附近布放观测传声器,在待降噪位置布放临时传声器;
4、通过观测传声器和临时传声器分别接收多个初级声源发出的初级声场信号,分别输出得到第一观测传声器信号和临时传声器信号;
5、对第一观测传声器信号做自相关处理,得到第一观测传声器信号的自相关序列,对第一观测传声器信号和临时传声器信号做互相关处理,得到第一观测传声器信号与临时传声器信号的互相关序列;
6、利用第一观测传声器信号的自相关序列和第一观测传声器信号与临时传声器信号的互相关序列计算得出观测传声器对临时传声器的观测路径序列;
7、撤除临时传声器,在多初级声源工作条件下,观测传声器接收初级声场信号得到第二传声器信号,利用第二观测传声器信号与观测传声器对临时传声器的观测路径序列计算得出待降噪位置的虚拟误差信号。
8、结合第一方面,在第一方面的某些实现方式中,该方法还包括:所述根据初级声源个数,以确定观测传声器个数的过程:根据初级声源个数n,确定观测传声器个数m,使m≥n。
9、结合第一方面,在第一方面的某些实现方式中,该方法还包括:所述第一观测传声器信号和临时传声器信号被标记为:
10、第一观测传声器信号mon=[mon1(n),mon2(n),…,monm(n),…,monm(n)]和临时传声器信号err(n);
11、其中,n表示信号离散时间点,monm(n)表示第m个观测传声器接收到的信号向量,m表示观测传声器个数。
12、结合第一方面,在第一方面的某些实现方式中,该方法还包括:所述对第一观测传声器信号做自相关处理,得到ri(k)=e[moni(n)moni*(n-k)],其中e[]表示期望计算,*表示共轭,k表示时间序列上的某一时刻,ri(k)表示第i个观测传声器信号的自相关序列,对第一观测传声器信号和临时传声器信号做互相关处理,得到ri(k)=e{moni(n)erri*(n-k)},ri(k)表示第i个观测传声器信号和临时传声器信号的互相关序列,i=1,2,…,m。
13、结合第一方面,在第一方面的某些实现方式中,该方法还包括:所述利用第一观测传声器信号的自相关序列和第一观测传声器信号与临时传声器信号的互相关序列计算得出观测传声器对临时传声器的观测路径序列的过程:
14、根据第i个观测传声器信号的自相关序列ri(k)和第i个观测传声器信号和临时传声器信号的互相关序列ri(k)计算观测传声器对临时传声器的观测路径序列,计算公式如下:
15、oi(k)=ri-1(k)ri(k)
16、其中,oi(k)表示第i个观测传声器信号对临时传声器信号的观测路径序列,ri-1(k)表示自相关序列ri(k)的逆,i=1,2,…,m。
17、结合第一方面,在第一方面的某些实现方式中,该方法还包括:所述第i个观测传声器信号对临时传声器信号的观测路径序列oi(k)的长度为l,k=0,1,…,l-1。
18、结合第一方面,在第一方面的某些实现方式中,该方法还包括:所述利用观测传声器信号和观测传声器对临时传声器的观测路径序列计算得出待降噪位置的虚拟误差信号的过程:
19、利用第二观测传声器信号mon=[mon1(n),mon2(n),…,monm(n),…,monm(n)]和第i个观测传声器信号对临时传声器信号的观测路径序列oi(k)计算此时待降噪位置的虚拟误差信号其中表示卷积。
20、本发明的有益效果:
21、本发明根据初级声源个数,确定观测传声器个数;为了对观测路径进行建模,在待降噪位置附近布放观测传声器,在待降噪位置布放临时传声器,使用观测传声器和临时传声器接收多初级声源工作时的初级声场信号,得到第一观测传声器信号和临时传声器信号,对以上第一观测传声器信号做自相关处理,对第一观测传声器信号和临时传声器信号做互相关处理;根据以上自相关和互相关处理的结果,计算观测传声器对临时传声器的观测路径序列;撤除临时传声器,在多初级声源工作条件下,观测传声器接收初级声场信号得到第二传声器信号,使用第二观测传声器信号和观测路径序列计算此时待降噪位置的虚拟误差信号。本发明可以在多初级声源条件下对虚拟误差信号进行较为准确的估计。
技术特征:1.一种多初级声源条件下的虚拟误差信号计算方法,其特征在于,方法包括以下步骤:
2.根据权利要求1所述的一种多初级声源条件下的虚拟误差信号计算方法,其特征在于,所述根据初级声源个数,以确定观测传声器个数的过程:根据初级声源个数n,确定观测传声器个数m,使m≥n。
3.根据权利要求1所述的一种多初级声源条件下的虚拟误差信号计算方法,其特征在于,所述第一观测传声器信号和临时传声器信号被标记为:
4.根据权利要求1所述的一种多初级声源条件下的虚拟误差信号计算方法,其特征在于,所述对第一观测传声器信号做自相关处理,得到ri(k)=e[moni(n)moni*(n-k)],其中e[]表示期望计算,*表示共轭,k表示时间序列上的某一时刻,ri(k)表示第i个观测传声器信号的自相关序列,对第一观测传声器信号和临时传声器信号做互相关处理,得到ri(k)=e{moni(n)erri*(n-k)},ri(k)表示第i个观测传声器信号和临时传声器信号的互相关序列,i=1,2,···,m。
5.根据权利要求1所述的一种多初级声源条件下的虚拟误差信号计算方法,其特征在于,所述利用第一观测传声器信号的自相关序列和第一观测传声器信号与临时传声器信号的互相关序列计算得出观测传声器对临时传声器的观测路径序列的过程:
6.根据权利要求5所述的一种多初级声源条件下的虚拟误差信号计算方法,其特征在于,所述第i个观测传声器信号对临时传声器信号的观测路径序列oi(k)的长度为l,k=0,1,···,l-1。
7.根据权利要求1所述的一种多初级声源条件下的虚拟误差信号计算方法,其特征在于,所述利用第二观测传声器信号与观测传声器对临时传声器的观测路径序列计算得出待降噪位置的虚拟误差信号的过程:
技术总结本发明公开了一种多初级声源条件下的虚拟误差信号计算方法,涉及主动降噪技术领域,包括:根据初级声源个数,以确定观测传声器个数,确定待降噪位置,在待降噪位置附近布放观测传声器,在待降噪位置布放临时传声器;通过观测传声器和临时传声器分别接收多个初级声源发出的初级声场信号,分别输出得到第一观测传声器信号和临时传声器信号;对第一观测传声器信号做自相关处理,得到自相关序列,对第一观测传声器信号和临时传声器信号做互相关处理,得到互相关序列;利用自相关序列和互相关序列计算得出观测传声器对临时传声器的观测路径序列;利用第二观测传声器信号与观测传声器对临时传声器的观测路径序列计算得出待降噪位置的虚拟误差信号。技术研发人员:韩宁,张天,段哲华受保护的技术使用者:东南大学技术研发日:技术公布日:2024/4/24本文地址:https://www.jishuxx.com/zhuanli/20240618/23505.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表