一种时域多声源定位及噪声处理方法与流程
- 国知局
- 2024-06-21 11:47:41
本发明涉及声源定位领域,具体地,涉及一种时域多声源定位方法及噪声处理方法。
背景技术:
1、随着民用、军用飞行器等航空运输的快速发展,气动噪声问题日益引起世界的广泛关注,因此亟需发展高效降噪方法。声源定位是解决噪声问题的第一步,只有精准定位声源位置,才能针对性开展噪声降噪方案研究。但是实际工程问题中大多存在多个声源且声源强度不一,这些声源可能来自不同的流动结构或物理过程,其可能辐射的多种频率的声信号,还会相互干扰,难以明确远场声信号频率信息与多个声源之间的关系,因此就无法确定哪一个是主要声源,哪一个是次要声源,导致降噪方案无法达到预期效果。
2、近年来出现了一种极具应用前景的声源定位方法—基于时间反演的声源定位方法(a. deneuve, p. druault, r. marchiano, p. sagaut, a coupled time-reversalcomplex differentiation method for aeroacoustic sensitivity analysis: towardsa source detection procedure, journal of fluid mechanics, 2010, 642: 181–212.),通过采用伪特征形式的euler方程(sesterhenn j. a characteristic-typeformulation of the navier–stokes equations for high order upwind schemes[j].computers&fluids, 2001, 30(1):37-67.)进行数值求解反问题,获得声源位置信息和声源强度信息,随后采用敏感度分析将远场声信号频率信息与近场声源相关联。
3、然而,伪特征形式方程是一种特殊方程,针对特定问题需要进行特殊处理,难以直接应用于现有的计算流体力学体系,不具备普适性,难以推广。现有的时域声源定位方法为采用反拉克斯-温德洛夫方法与时间反演相结合,成功将基于时间反演声源定位方法从特殊方程推广到一般形式的守恒型euler方程并提高了声源定位的精度,可以达到精准定位近场复杂流动中的噪声源,但是仍然无法解决远场程声信号频率信息与近场多声源之间的联系。此时如果盲目对近场复杂流动中的所有噪声源进行降噪处理,第一是性价比不高,实际操作难度大;第二是声源之间会相互影响,有可能某一个声源噪声确实降低,但引起其它声源噪声增大,得不偿失;第三是频率信号通常具有主频和对应得谐频信号,一般来说是由同一个声源发出,但是很多时候是多个声源发声信号之间得耦合效应导致。应此需要将远场声信号频率与近场复杂流动中多声源相关联,再进一步进行原因分析,才能找到合适的降噪方案,达到事半功倍的效果。
技术实现思路
1、本发明提供了一种时域多声源定位及噪声处理方法,本发明在时域声源定位方法的基础上,将基于复变量微分的瞬时敏感度分析方法与守恒型euler方程、时间反演方法、反拉克斯-温德洛夫方法进一步结合,建立了一种时域多声源定位及噪声处理方法,本方法将基于复变量的敏感度分析方法应用于守恒型euler方程;采用复变量微分方法进行敏感度分析,建立远场声信号中的频率信息与近场复杂流场中的多个声源之间的对应关系,该噪声处理方法能够从众多的噪声源中准确的找到特定频率噪声对应的一个或多个声源,进而能够准确的对某些噪声源进行准确的降噪处理。
2、该噪声处理方法能够从众多的噪声源中准确的找到特定频率噪声的声源,进而能够准确的对某个噪声源进行准确的降噪处理。
3、为实现上述发明目的,本发明提供了一种时域多声源定位及噪声处理方法,所述方法包括:
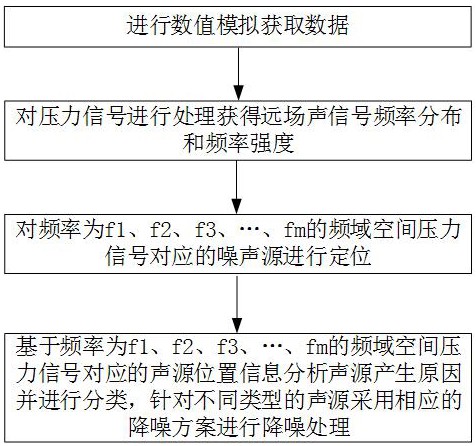
4、步骤1:进行数值模拟获取数据,包括:分析气动噪声问题并建立气动噪声问题对应的物理模型;在网格生成软件中建立物理模型对应的几何模型;将几何模型外表面和整个计算区域进行空间网格划分,生成计算所需要的网格,设定边界条件并导出网格文件;将网格文件导入流体仿真软件,设定初始条件进行数值模拟计算,当计算达到稳定后的时刻记为时刻t0;计算n个周期后的时刻记为时刻t1,n为整数;在时刻t0至时刻t1之间,存储网格边界处每个边界点与时刻t相关的物理量数据和时刻t1整个网格每个点的物理量数据;
5、步骤2:对压力信号进行处理获得远场声信号频率分布和频率强度,包括:通过傅里叶变换将时域空间内网格边界上每个网格点处的压力信号p序列转换为频域空间压力信号,获得频域空间压力信号频率分布,将频率按照幅值从大到小排序标记为fr,r=1,2,3,…,m,m为频率个数;
6、步骤3:对频率为f1的频域空间压力信号对应的噪声源进行定位,包括:
7、步骤3.1:基于步骤1中存储的数据进行变换获得时间反演所需的数据,包括:基于时刻t和时刻t1获得时间反演的时刻ttr,t大于或等于t0且小于或等于t1,基于时刻t对应的网格边界处每个边界点物理量数据,获得时刻ttr对应的网格边界处每个边界点物理量数据;
8、步骤3.2:对边界上的物理量数据进行处理包括:
9、步骤3.2.1:获得边界点的时间导数,包括:基于所有时刻的所有网格边界处每个边界点物理量数据计算获得网格边界处每个网格点对应守恒变量u在时刻ttr的时间导数;
10、步骤3.2.2:获得边界点的空间切向导数,包括:基于时刻ttr对应的网格边界处每个边界点物理量数据,分别计算获得时刻ttr网格边界处每个网格点在x方向无粘通量的空间切向导数和在y方向无粘通量的空间切向导数;
11、步骤3.2.3:获得边界点的空间法向一阶导数,包括:基于网格边界处每个网格点对应守恒变量u在时刻ttr的时间导数、时刻ttr网格边界处每个网格点在x方向无粘通量的空间切向导数和时刻ttr网格边界处每个网格点在y方向无粘通量的空间切向导数,计算获得网格边界处每个网格点对应守恒变量u在时刻ttr的空间法向一阶导数;
12、步骤3.2.4:构造多项式,包括:基于守恒变量u在网格预设位置对应的数值和守恒变量u在网格预设位置的空间法向一阶导数构造多项式;
13、步骤3.2.5:令虚拟点的取值为所述多项式在相应点处的取值,对频率为f1对应的压力信号成分进行傅里叶逆变换获得时域空间的单频压力信号,将单频压力信号以虚部的形式添加到压力信号p上获得复数形式的新压力信号,,im为虚元;基于虚拟点的数值、网格内部点的数值和新压力信号进行计算获得下一时刻tk网格内部点的物理量数据;
14、步骤3.3:将时刻t替换为时刻tk,判断时刻tk是否小于或等于t1,若是则返回执行步骤3.1,获得时刻t0至时刻t1对应的所有网格点的物理量数据,若否则执行步骤3.4;
15、步骤3.4:获得频率为f1的频域空间压力信号对应的一个或多个声源位置,包括:当tk=t1 时,基于所有网格点的复数形式的新压力信号的虚部构建压强云图,基于压强云图中压力信号最大处的位置获得频率为f1的频域空间压力信号对应的声源位置信息;
16、步骤4:对频率为f2、f3、…、fm的频域空间压力信号依次进行步骤3所述的噪声源定位处理,获得频率为f2、f3、…、fm的频域空间压力信号对应的声源位置信息;
17、步骤5:基于频率为f1、f2、f3、…、fm的频域空间压力信号对应的声源位置信息分析声源产生原因并进行分类,针对不同类型的声源采用相应的降噪方案进行降噪处理。
18、其中,时间反演的初始条件需要网格边界处的时间导数或时序数据,但对边界处理非常敏感,容易从外部引入伪波导致声源定位分辨率不高。反lax-wendroff方法即反拉克斯-温德洛夫方法是一种高精度、稳定的边界处理方法,需要给定边界条件,多适用于固壁边界、动边界情况。本发明将时间反演和反lax-wendroff方法进行结合,实现稳定高精度高分辨率的声源定位。
19、其中,有多个声源时,本方法能够基于频率从压强云图中获得对应的声源位置信息。每个声源对目标的影响效果不同,本方法可以确定频率对应的声源位置信息;然后基于确定的频率对应的声源位置信息,对该位置处的声源进行降噪处理,即能够从多个声源中确定相应频率的声源,然后对不同频率的噪声进行相应的降噪处理。
20、其中,在一些实施例中,网格边界处每个边界点与时刻t相关的物理量数据包括:时刻t对应的密度、时刻t对应的x方向速度、时刻t对应的y方向速度和时刻t对应的压强,x表示横向空间坐标,y表示纵向空间坐标;
21、时刻ttr对应的物理量数据包括:时刻ttr对应的密度、时刻ttr对应的x方向速度、时刻ttr对应的y方向速度和时刻ttr对应的压强,其中:
22、。
23、其中,在一些实施例中,网格边界处每个网格点对应守恒变量u的时间导数包括:、、和,其中,网格边界处每个网格点对应守恒变量u的时间导数的计算方式为:
24、;
25、其中,u1是守恒变量u的第一分量,u2是守恒变量u的第二分量,u3是守恒变量u的第三分量,u4是守恒变量u的第四分量,是比热比。
26、其中,在一些实施例中,网格边界处每个网格点在x方向无粘通量的空间切向导数包括:,,和;
27、网格边界处每个网格点在y方向无粘通量的空间切向导数包括:,,和;
28、其中:
29、;
30、其中,是y方向无粘通量的第一分量,是y方向无粘通量的第二分量,是y方向无粘通量的第三分量,是y方向无粘通量的第四分量;
31、;
32、其中,是x方向无粘通量的第一分量,是x方向无粘通量的第二分量,是x方向无粘通量的第三分量,是x方向无粘通量的第四分量。
33、其中,在一些实施例中,所述步骤3.2.3具体包括:基于网格边界处每个网格点对应守恒变量u的时间导数、网格边界处每个网格点在x方向无粘通量的空间切向导数和网格边界处每个网格点在y方向无粘通量的空间切向导数,采用反拉克斯-温德洛夫方法计算获得网格边界处每个网格点对应守恒变量u的空间法向一阶导数。
34、其中,在一些实施例中,所述步骤3.2.3具体包括:
35、求解网格边界处每个网格点上的特征值,获得四个特征方向的特征值;
36、构建左特征值矩阵;
37、基于四个特征方向的特征值对应的特征量获得出口边界信息和入流边界信息;
38、基于左特征值矩阵、出口边界信息和入流边界信息构建空间法向一阶导数求解矩阵;
39、求解所述空间法向一阶导数求解矩阵获得网格边界处每个网格点对应守恒变量u的空间法向一阶导数。
40、其中,在一些实施例中,四个特征方向的特征值为:,i=1或2或3或4,其中,,,,,表示该网格点处x方向速度,表示该网格点的声速;
41、左特征值矩阵为:
42、;
43、其中,是左特征值矩阵的第一分量,是左特征值矩阵的第二分量,是左特征值矩阵的第三分量,是左特征值矩阵的第四分量;为左特征值矩阵在坐标处的值;
44、基于四个特征方向的特征值的数值大小关系判断获得出口边界对应的特征量以及入流边界对应的特征向量;
45、出口边界对应的特征量采用四阶拉格朗日外插获得;
46、入流边界对应的特征向量采用反拉克斯-温德洛夫方法获得,基于入流边界对应的特征向量获得网格边界处每个网格点对应守恒变量u的空间法向一阶导数。
47、其中,在一些实施例中,网格预设位置的空间法向一阶导数构造多项式为:
48、;
49、其中,是多项式在x=x1处的值,是多项式在x=x2处的值,是多项式在x=x3处的值,是多项式在x=x4处的值,是多项式在x=x1处的一阶导数值,是守恒变量u在x=x1处的值,是守恒变量u在x=x2处的值,是守恒变量u在x=x3处的值,是守恒变量u在x=x4处的值,是守恒变量u在x=x1处的空间法向一阶导数。
50、其中,在一些实施例中,虚拟点的取值的计算方式为:
51、;
52、其中,是多项式在x=xj处的值。
53、其中,在一些实施例中,所述方法还包括:步骤6:获得降噪结果,根据降噪结果判断是否调整当前降噪方案。
54、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
55、由于本方法采用复变量微分方法进行瞬时敏感度分析,建立远场声信号中的频率信息与近场复杂流场中的多个声源之间的对应关系,可以明确远场声信号中的关键频率对应与近场复杂流动中的一个或者多个噪声源,然后针对该噪声源发展降噪策略研究。
本文地址:https://www.jishuxx.com/zhuanli/20240618/23599.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。