一种骨导传感器辅助的广义旁瓣消除方法
- 国知局
- 2024-06-21 11:53:47
本发明属于信号处理,涉及一种骨导传感器辅助的广义旁瓣消除方法。
背景技术:
1、多通道语音增强算法需要使用麦克风阵列技术。阵列信号处理旨在利用多个麦克风来获取空间信息,从而进行空域信号处理。波束形成是麦克风阵列的重要应用之一,其目的是拾取目标方向的信号,同时对其它方向的信号进行抑制。波束形成器既有与麦克风接收信号无关的固定波束形成器,如延迟求和波束形成器(delay and sum beamformer,dsb)、超指向性波束形成器(super directive beamformer,spd)等,也有与麦克风接收信号相关的自适应波束形成器,其相当于具有自适应噪声抑制能力的固定波束形成器,因此通常能够更有效地抑制噪声。自适应波束成形器利用期望信号与干扰信号的相关性,逐帧更新滤波器的权系数以改善输出信噪比。如何控制自适应滤波器中的自适应过程一直是多通道麦克风阵列处理技术的难点和研究热点。
2、自适应波束形成算法主要有最小方差无失真响应(minimum variancedistortionless response,mvd)波束形成算法,线性约束最小方差(linearlyconstrained minimum variance,lcmv)波束形成算法和广义旁瓣消除(generalizedsidelobe cancller,gsc)波束形成算法。广义旁瓣消除器由三个部分组成:固定波束成形器(fixed beamformer,fbf)、阻塞矩阵(blocking matrix,abm)、自适应噪声消除器(adaptive noise canceller,anc)。其中,fbf是由一组固定权系数并为了保留期望信号方向并抑制其他方向干扰的滤波器;bm是为了去除期望语音信号并更多地保留非期望的干扰信号;anc利用了阻塞矩阵的输出信号作为参考,消除固定波束成形器旁瓣泄露的噪声。gsc将多通道处理各部分模块化并将自适应滤波器的约束问题转换成无约束问题,为后续的麦克风自适应波束成形技术提供了理论基础框架。但是在期望方向信号的能量较高时,原始gsc的阻塞矩阵难以将期望信号全部抑制,使得自适应噪声消除器模块以阻塞矩阵泄露的期望信号为参考消除了部分需要保留的期望信号,容易导致处理结果失真。为了解决该问题,hoshuyama提出了鲁棒自适应gsc,对阻塞矩阵也进行了自适应处理,但仍存在不足。
3、随着语音技术的发展,骨导(bone-conduction,bc)传感器诞生了,与传统气导(air-conduction,ac)麦克风不同的是,bc传感器采集的是颅骨的振动,而不是通过空气传播的声音,所以它对环境噪声不敏感。bc传感器从声音采集处就屏蔽了环境噪声,从根源上遏制环境噪声对有用信号的污染,使得通信系统中没有环境杂音的传输,从而提高通信的清晰度和流畅度。即使bc传感器不会采集通过空气传播的声学噪声,但对振动非常敏感的bc传感器有可能会引入非声学的噪音,比如运动时带来的摩擦噪音等,这会降低通话质量。由于人体的低通特性,bc语音的高频部分会严重衰减,这导致bc语音听起来沉闷、可懂度低,所以它不适合直接使用。
4、因此,以上现有技术未考虑利用骨导传感器辅助广义旁瓣消除器,以解决单纯气导语音增强算法容易导致处理结果失真和未能更好抑制噪音等问题。
技术实现思路
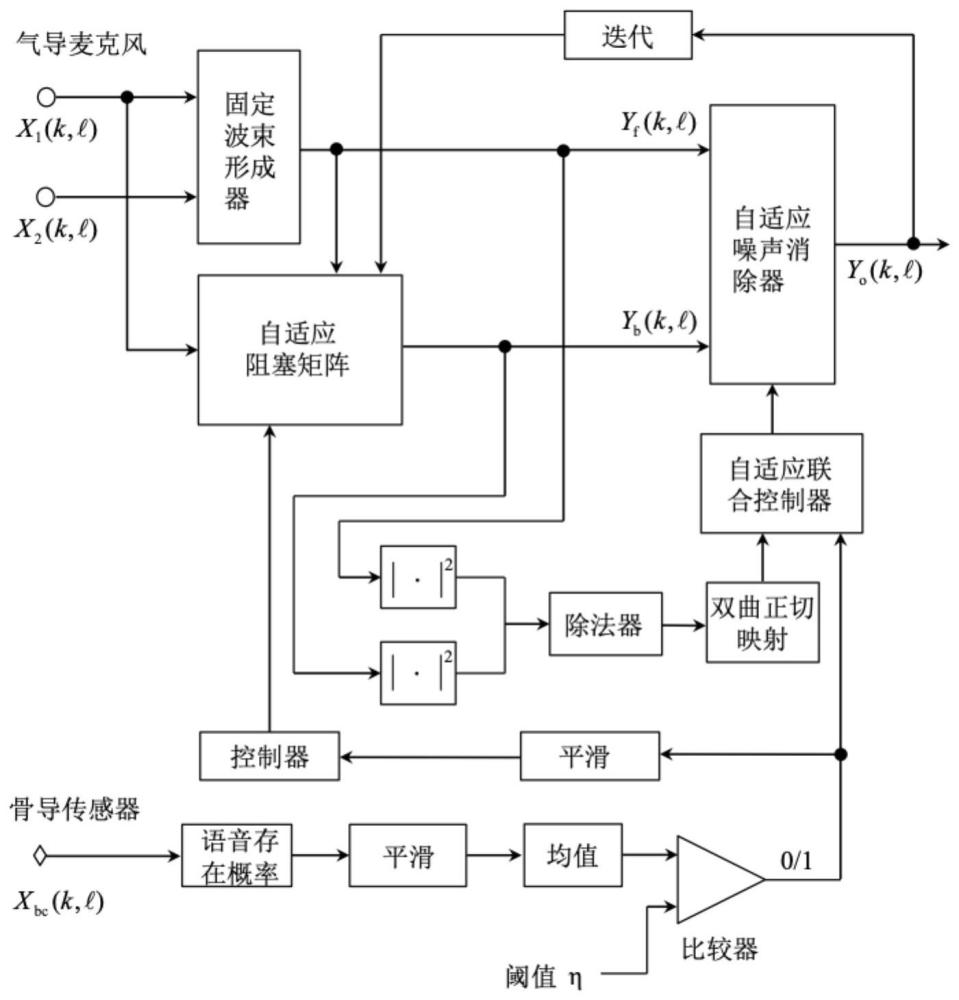
1、为解决以上现有问题,本发明采用一种骨导传感器辅助的广义旁瓣消除方法,包括:分别利用骨导传感器和麦克风采集语音信号;根据骨导传感器采集的语音信号xbc估计语音存在概率,根据语音存在概率计算语音活动检测结果;利用广义旁瓣消除器根据语音活动检测结果对麦克风采集的语音信号x进行过滤,得到增强信号。
2、麦克风采集的语音信号x包括期望语音信号。
3、广义旁瓣消除器包括:波束形成器、自适应噪声消除器以及自适应阻塞矩阵模块;广义旁瓣消除器对麦克风采集的语音信号x进行处理包括:
4、s1、对语音活动检测结果进行平滑控制,根据平滑控制后的语音活动检测结果更新自适应阻塞矩阵模块abm,得到自适应阻塞矩阵模块abm';
5、s2、设置最大迭代次数n,将麦克风采集的语音信号x输入波束形成器;
6、s3、将波束形成器的输出信号和期望语音信号输入自适应阻塞矩阵模块abm';
7、s4、根据波束形成器的输出信号、自适应阻塞矩阵模块abm'的输出信号计算控制参数,根据语音活动检测结果和控制参数更新自适应噪声消除器anci-1,得到自适应噪声消除器anci;其中,i为迭代次数;
8、s5、将波束形成器的输出信号和自适应阻塞矩阵模块abm'的输出信号输入自适应噪声消除器anci,得到噪声消除信号;
9、s6、当达到最大迭代次数时,将自适应噪声消除器ancn的输出信号作为增强信号;否则,回到步骤s3,并利用自适应噪声消除器anci的输出信号代替波束形成器的输出信号输入自适应阻塞矩阵模块abm'。
10、对语音活动检测结果进行平滑控制包括:
11、设置阈值t1、t2,若语音帧l的语音活动检测结果i(l)=0,并且语音帧l之后的t1个连续语音帧的i(l)都为1时,将语音帧的i(l)从0切换为1;若语音帧的语音活动检测结果i(l)=1,并且语音帧l之后的t2个连续语音帧的i(l)都为0时,将语音帧l的i(l)从1切换为0,否则不切换语音帧l的i(l)。
12、更新自适应阻塞矩阵模块abm包括:若平滑后的语音活动检测结果为1,则使用qrd算法更新自适应阻塞矩阵模块abm,得到自适应阻塞矩阵模块abm';否则,不更新自适应阻塞矩阵模块abm,得到自适应阻塞矩阵模块abm';所述qrd算法为正交三角分解算法。
13、计算控制参数包括:计算波束形成器的输出信号和更新后的自适应阻塞矩阵模块的输出信号的功率比sir,使用双曲正切函数将sir映射到0到1之间,得到sir映射结果,根据sir映射结果得到控制参数。
14、更新自适应噪声消除器anci-1包括:若语音活动检测结果为0,则使用qrd算法更新自适应噪声消除器anci-1,得到自适应噪声消除器anci;否则,利用控制参数控制qrd算法的更新速度,并通过控制qrd算法的更新速度更新自适应噪声消除器anci-1,得到自适应噪声消除器anci;所述qrd算法为正交三角分解算法。
15、利用控制参数控制qrd算法的更新速度包括:根据控制参数计算参数ξa(k,l),根据参数ξa(k,l)计算可变的遗忘因子,根据可变的遗忘因子控制qrd算法的更新速度;其中,k表示频点,l表示帧。
16、估计语音存在概率包括:估计骨导传感器采集的语音信号xbc中噪声的功率谱;计算先验信噪比;获取骨导传感器采集的语音信号xbc的功率谱;根据信号xbc的噪声的功率谱、先验信噪比以及信号xbc的功率谱估计语音存在概率。
17、计算语音活动检测结果包括:对语音存在概率进行平滑操作,根据平滑后的语音存在概率计算语音存在概率的均值,根据语音存在概率的均值计算语音活动检测结果。
18、有益效果:
19、1、本发明提出了一种骨导传感器辅助的广义旁瓣消除方法,利用骨导语音得到准确语音活动检测结果vad,进而利用得到的vad控制gsc中自适应阻塞矩阵和自适应噪声消除器的系数更新,减少了期望信号失真的同时具有更好的噪声抑制效果和更强的鲁棒性;2、本发明在第一次广义旁瓣消除之后采用了一种有效的迭代策略,进一步消除残留噪声,不仅能够明显地提升语音质量,而且能提升语音可懂度。
本文地址:https://www.jishuxx.com/zhuanli/20240618/24332.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。