一种转镜同步高速跟踪系统及控制方法
- 国知局
- 2024-06-21 12:23:10
本发明涉及一种高速目标跟踪系统,具体是一种基于旋转反光镜与高速相机的高速目标跟踪装置。
背景技术:
1、在军事领域中,高速目标(子弹,炮弹等)运动姿态是测试的重要内容之一。高速目标运动姿态对于分析和评价目标的运动特性、提高武器的效能及命中精度具有重要意义。
2、对于高速目标飞行姿态的捕捉需要运用高速跟踪技术,现有的高速跟踪技术主要包括多普勒雷达、使用相机阵列接力拍摄、激光跟踪仪等。其中使用多普勒雷达跟踪高速目标的方式具有测量目标速度的能力,但此种方式难以记录目标飞行姿态的细节。使用相机阵列接力拍摄的方式可以记录高速目标飞行姿态细节,但成本高昂且需要繁琐的视频后期处理步骤。使用激光跟踪仪跟踪高速目标通常需要被跟踪目标表面具有靶镜,适应性较弱。综上,目前方法对于高速目标跟踪存在成本高,步骤繁琐,适应性差等缺点,不能满足军事领域中对高速目标精确跟踪并记录运动姿态的需求。
技术实现思路
1、本发明旨在解决现有技术的不足,提供一种基于旋转反光镜和高速相机的高速跟踪系统,技术方案如下:
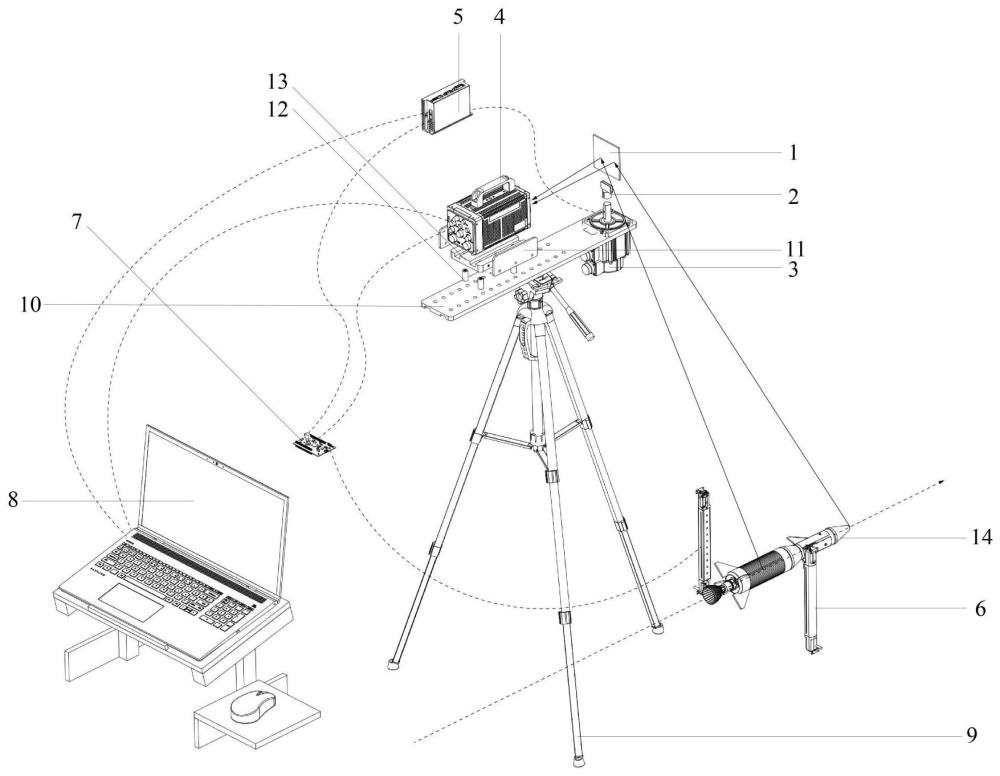
2、.一种转镜同步高速跟踪系统,包括伺服转镜部分,高速相机部分,触发装置部分,支架部分,主控部分,其特征在于,伺服转镜部分包括伺服电机,反光镜,连接器件,电机驱动器;高速相机部分包括高速相机,副支撑板,挡板,支撑腿;触发装置部分包括光幕;支架部分包括三脚架,主支撑板和转轴;主控部分包括计算机和mcu;
3、伺服转镜部分:连接器件的一端设置方形槽用来固定反光镜,另一端开孔并设置用来连接伺服电机的电机转子的键槽,伺服电机与电机驱动器使用编码线与动力线相连接;
4、高速相机部分:高速相机通过固定连接在副支撑板上,副支撑板两侧设有挡板用于防止高速相机跌落;副支撑板通过支撑腿固定连接在主支撑板上;
5、触发装置部分:光幕被放置在高速目标运动经过的路程两侧,用于检测高速目标是否经过;
6、支架部分,转轴设置在三脚架上,用于调整跟踪角度;在主支撑板上开设有电机固定孔用以固定伺服电机;
7、主控部分,计算机用于给伺服电机烧录旋转曲线和设置高速相机;mcu与电机驱动器,高速相机和光幕连接,用于检测光幕产生的高速目标经过的信号并启动高速相机和伺服电机。
8、进一步的,在主支撑板上设置有等间距的若干组支撑腿固定螺孔与支撑腿相连接,根据高速相机的体积与重量选择支撑腿固定位置。
9、本发明同时提供使用所述系统实现的转镜同步高速跟踪方法,包括下列步骤:
10、确定高速目标的运动轨迹和运动速度;
11、将转镜同步高速跟踪系统放置在高速目标的一侧,,伺服电机驱动反光镜旋转,跟踪高速目标;
12、根据高速目标的运动轨迹和运动速度;使用伺服电机的block motion功能预设旋转曲线,此功能将运动曲线近似拟合成台阶状的直线运动,并提前烧录进电机驱动器中;
13、预设伺服电机的旋转曲线,当高速目标经过光幕时,光幕给mcu发送信号,mcu依次启动高速相机和伺服电机,伺服电机按照预设好的曲线进行旋转,高速相机记录下整个跟踪轨迹。
14、本发明具有优势如下:
15、1.成本较低:相较于使用多台高速相机接力拍摄的方法,本发明仅使用一台高速相机,拥有较低的成本。
16、2.便于携带:本发明的硬件较少,易于集成,方便携带去野外的环境进行测试。
17、3.可以记录姿态:相较于多普勒雷达,激光跟踪仪等方式,本发明的装置可以完整记录下高速目标的飞行姿态,便于后续分析。
18、附图说明
19、图1为本发明的转镜同步高速跟踪系统的整体结构图;
20、图2为本发明的转镜同步高速跟踪系统的机械结构细节图;
21、图3为本发明的转镜同步高速跟踪系统的工作示意图;
22、图4为本发明的转镜同步高速跟踪系统的电机曲线拟合方法图;
23、图5为本发明的转镜同步高速跟踪系统的工作流程图。
技术特征:1.一种转镜同步高速跟踪系统,包括伺服转镜部分,高速相机部分,触发装置部分,支架部分,主控部分,其特征在于,伺服转镜部分包括伺服电机,反光镜,连接器件,电机驱动器;高速相机部分包括高速相机,副支撑板,挡板,支撑腿;触发装置部分包括光幕;支架部分包括三脚架,主支撑板和转轴;主控部分包括计算机和mcu;
2.根据权利要求1所述的转镜同步高速跟踪系统,其特征在于,在主支撑板上设置有等间距的若干组支撑腿固定螺孔与支撑腿相连接,根据高速相机的体积与重量选择支撑腿固定位置。
3.使用权利要求1或2任意一项所述的系统实现的转镜同步高速跟踪方法,包括下列步骤:
技术总结本发明涉及一种转镜同步高速跟踪系统,包括伺服转镜部分,高速相机部分,触发装置部分,支架部分,主控部分。伺服转镜部分包括伺服电机,反光镜,连接器件,电机驱动器;高速相机部分包括高速相机,副支撑板,挡板,支撑腿;触发装置部分包括光幕;支架部分包括三脚架,主支撑板和转轴;主控部分包括计算机和MCU;伺服转镜部分:连接器件的一端设置方形槽用来固定反光镜,另一端开孔并设置用来连接伺服电机的电机转子的键槽,伺服电机与电机驱动器使用编码线与动力线相连接;触发装置部分:光幕被放置在高速目标运动经过的路程两侧,用于检测高速目标是否经过。本发明同时提供利用上述转镜同步高速跟踪系统实现的跟踪方法。技术研发人员:吴斌,刘灏然,康杰虎,张健伟,冯橹源,赵宗扬,吴江受保护的技术使用者:天津大学技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240618/27017.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表