光学成像系统、电子内窥镜及手术机器人的制作方法
- 国知局
- 2024-06-21 12:32:22
本发明涉及医疗器械,具体而言,涉及一种光学成像系统、电子内窥镜及手术机器人。
背景技术:
1、众所周知,微创手术的发展给众多患者带来了福音,具有创伤小、出血少、恢复快的优点,已经成为国内的手术主流,如腹腔镜阑尾炎、腹腔镜肠癌,腹腔镜子宫切除等大部分疾病均可以微创手术进行治疗。在这些手术中,除了医生精湛的医术外,腹腔镜有着不可忽视的作用,目前的腹腔镜主要有电子镜和光学镜两种。电子镜结构简单,体积小,分辨率低;光学镜结构复杂,体积大,分辨率高。随着手术机器人的横空出世,腹腔镜的使用越来越成熟,应用范围越来越广泛。而且,相较于微创手术,机器人替换医生进行手术,再加上3d内窥镜辅助,手术更加精细,创口更小,出血量更少。
2、目前2d和3d的腹腔镜均是硬管内窥镜,视向角有0°、30°、45°等,是一体式钢制结构,长度及视野比较固定,虽然手术机器人可以通过旋转内窥镜增加视野范围,但是依然存在视野盲区,需要在手术中切换不同视向角的腹腔镜,影响手术效率。针对该问题,可以借鉴软管内窥镜结构,对电子腹腔镜前端头结构进行改进,因为软镜的前端头可以上下左右弯曲,可视向角约170°左右。若电子腹腔镜的前端头“软镜化”,再配备给手术机器人,那么疑难杂症的手术成功率将会大幅提升,患者的术后恢复会更快更好。
3、然而,现有适配电子腹腔镜的前端头“软镜化”的光学成像系统的整体体积比较大,且结构复杂,生产成本高,难于满足微创手术的使用需求。
技术实现思路
1、本发明的主要目的在于提供一种光学成像系统、电子内窥镜及手术机器人,以解决现有技术中用于电子腹腔镜的光学成像系统的整体体积比较大,且结构复杂,生产成本高的问题。
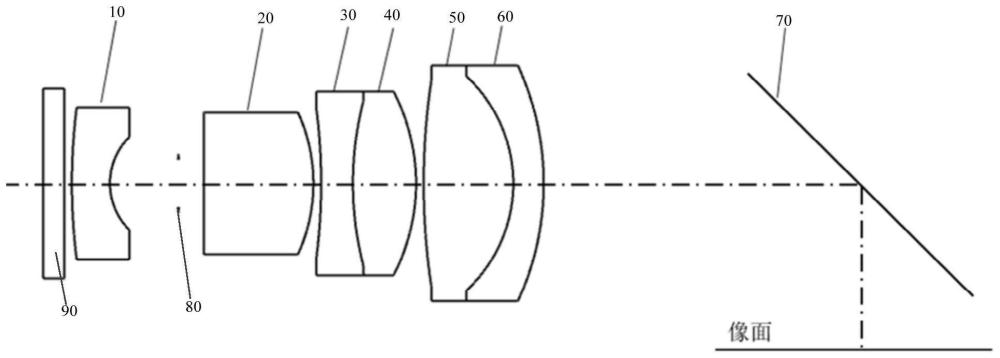
2、根据本发明的一个方面,提供了一种光学成像系统,包括沿物侧至像侧依次设置的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜以及转向棱镜,所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜、第五透镜以及第六透镜的物侧面和像侧面均为球面;
3、其中,所述第一透镜的有效焦距f1和所述光学成像系统的有效焦距f满足关系式:0.75<|f1/f|<0.9。
4、进一步地,所述第五透镜的物侧面的曲率半径r8与所述第五透镜的像侧面的曲率半径r9满足关系式:2.7<(r8-r9)/(r8+r9)<3.2。
5、进一步地,所述第三透镜和所述第四透镜的组合焦距f34与所述光学成像系统的有效焦距f满足关系式:3.3<|f34/f|<4.2。
6、进一步地,所述第五透镜的有效焦距f5、所述第六透镜的有效焦距f5、以及所述第五透镜和所述第六透镜的组合焦距f满足关系式:2<(f5-f6)/f56<2.6。
7、进一步地,所述第二透镜的中心厚度ct2以及所述第一透镜的物侧面至所述第六透镜的像侧面于光轴上的距离∑ct16满足关系式:ct2/∑ct16>0.23。
8、进一步地,所述第三透镜和所述第四透镜为胶合透镜;和/或,
9、所述第三透镜的物侧面为凹面,所述第三透镜的像侧面凹面,所述第四透镜的物侧面为凸面,所述第四透镜的像侧面为凸面。
10、进一步地,所述第五透镜和所述第六透镜为胶合透镜;和/或,
11、所述第五透镜的像侧面为凸面,所述第五透镜的像侧面为凸面,所述第六透镜的物侧面为凹面,像侧面为凸面。
12、进一步地,所述第二透镜包括正透镜。
13、另一方面,本申请还提供了一种电子内窥镜,所述电子内窥镜包括上述的光学成像系统。
14、第三方面,本申请还提供了一种手术机器人,所述手术机器人包括上述的电子内窥镜。
15、在本发明中,由于光学成像系统的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜以及第六透镜的物侧面和像侧面均为球面,结构更简单,更加便于生产和加工,能够在一定程度上降低本实施例中的光学成像系统的生产制造成本。此外,在本申请通过使第一透镜的有效焦距f1和光学成像系统的有效焦距f满足关系式:0.75<|f1/f|<0.9,可以有效控制光学成像系统的光线的出射角度,避免因为光线出射角度过大导致光学成像系统的口径变大,能够在兼顾光学成像系统的视场范围的同时,尽可能地实现光学成像系统的小型化设计,如此,当将本申请中的光学成像系统安装在内窥镜等医疗器械中时,便于满足微创手术等的使用需求。
技术特征:1.一种光学成像系统,其特征在于,包括沿物侧至像侧依次设置的第一透镜(10)、第二透镜(20)、第三透镜(30)、第四透镜(40)、第五透镜(50)、第六透镜(60)以及转向棱镜(70),所述第一透镜(10)、所述第二透镜(20)、所述第三透镜(30)、所述第四透镜(40)、第五透镜(50)以及第六透镜(60)的物侧面和像侧面均为球面;
2.根据权利要求1所述的光学成像系统,其特征在于,所述第五透镜(50)的物侧面的曲率半径r8与所述第五透镜(50)的像侧面的曲率半径r9满足关系式:2.7<
3.根据权利要求1所述的光学成像系统,其特征在于,所述第三透镜(30)和所述第四透镜(40)的组合焦距f34与所述光学成像系统的有效焦距f满足关系式:3.3<|f34/f|<4.2。
4.根据权利要求1所述的光学成像系统,其特征在于,所述第五透镜(50)的有效焦距f5、所述第六透镜(60)的有效焦距f5、以及所述第五透镜(50)和所述第六透镜(60)的组合焦距f满足关系式:2<(f5-f6)/f56<2.6。
5.根据权利要求1所述的光学成像系统,其特征在于,所述第二透镜(20)的中心厚度ct2以及所述第一透镜(10)的物侧面至所述第六透镜(60)的像侧面于光轴上的距离∑ct16满足关系式:ct2/∑ct16>0.23。
6.根据权利要求1至5中任一项所述的光学成像系统,其特征在于,所述第三透镜(30)和所述第四透镜(40)为胶合透镜;和/或,
7.根据权利要求1至5中任一项所述的光学成像系统,其特征在于,所述第五透镜(50)和所述第六透镜(60)为胶合透镜;和/或,
8.根据权利要求1至5中任一项所述的光学成像系统,其特征在于,所述第二透镜(10)包括正透镜。
9.一种电子内窥镜,其特征在于,所述电子内窥镜包括权利要求1至8中任一项所述的光学成像系统。
10.一种手术机器人,其特征在于,所述手术机器人包括权利要求9中所述的电子内窥镜。
技术总结本发明公开了一种光学成像系统、电子内窥镜及手术机器人。本发明的光学成像系统包括沿物侧至像侧依次设置的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜以及转向棱镜,所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜、第五透镜以及第六透镜的物侧面和像侧面均为球面;其中,所述第一透镜的有效焦距f1和所述光学成像系统的有效焦距f满足关系式:0.75<|f1/f|<0.9。本发明可以解决现有技术中用于电子腹腔镜的光学成像系统的整体体积比较大,且结构复杂,生产成本高的问题。技术研发人员:张佳莹受保护的技术使用者:杭州海康慧影科技有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240618/27700.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表