OPC光刻模型参数优化方法与流程
- 国知局
- 2024-06-21 12:34:55
本发明属于半导体光刻,特别涉及到一种opc光刻模型(litho model)参数优化方法。
背景技术:
1、随着半导体工艺节点的不断缩小,特别是40nm及以下工艺节点逐渐成为主流产品,opc(optical proximity correction,光学临近效应修正)已成为半导体制程中的不可或缺的一个重要环节。准确的opc模型是进行opc修正的前提条件,而opc光刻模型(lithomodel)又是opc最终resist model(光阻模型)的不可或缺的基础及重要环节,opc光刻模型(litho model)的好坏直接关系到最终的resist model(光阻模型)的成功与否。当前opc光刻模型(litho model)建模主要依赖于opc工程师个人的经验,通过人工对建模参数范围进行预估,然后对相关opc光刻模型(litho model)参数进行适当网格划分,再通过相关优化方法获得光刻(litho)参数的优化解。这样做一方面由于光刻模型(litho model)参数网格划分疏密很难控制,如网格划分太疏可能只能获得局部优化解而不能获得全局优化解,相反如网格划分太密,则整个优化过程又太费时,同时也因包含很多重复无效的优化计算,从而难以快速找到最优解;另一方面参数网格化一般只适合2维参数优化的情况,对于3维及以上维数的参数优化情况由于网格数目呈指数级增长,因而太过于庞大而变得不适用。
技术实现思路
1、本发明要解决的技术问题是提供一种opc光刻模型(litho model)参数优化系统,可以快速、准确地获得opc光刻模型(litho model)建模过程中镜头光学焦点(beam focus,bf)和偏移焦点(defocus start,ds)等参数。
2、为解决上述技术问题,本发明提供的opc光刻模型(litho model)参数优化方法,其设置参数设置模块、随机方向法模块及精确搜索法模块;
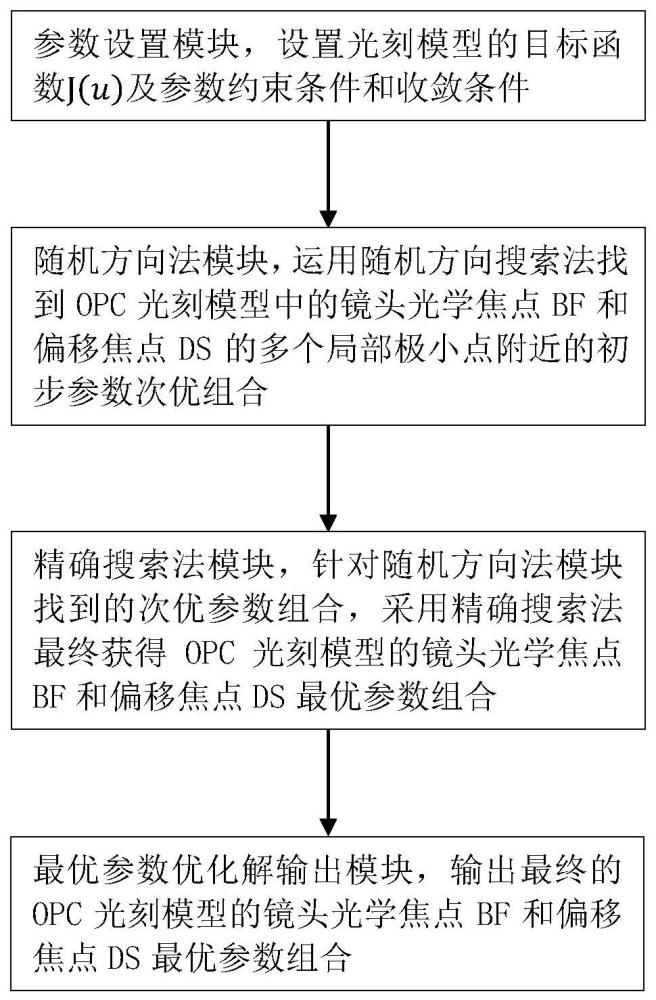
3、所述参数设置模块,用于设置光刻模型(litho model)的目标函数j(u)及参数约束条件和收敛条件;
4、所述随机方向法模块,运用随机方向搜索法找到opc光刻模型(litho model)中的镜头光学焦点(beam focus)和偏移焦点(defocus start)的多个局部极小点附近的初步参数次优组合;
5、所述精确搜索法模块,针对所述随机方向法模块找到的所述次优参数组合,采用精确搜索法最终获得opc光刻模型(litho model)的镜头光学焦点(beam focus)和偏移焦点(defocus start)最优参数组合。
6、较佳的,光刻模型的目标函数j(u)为:
7、
8、t(xi,yi,bf,ds)是通过光学成像模型预估出的cd值,cd(xi,yi)是通过实际光刻系统曝光后的测量校准cd值,wti是权重系数,其值越大说明该cd值越重要,n是所有特征图案的个数;
9、opc光刻模型的目标函数j(u)的参数约束条件为:
10、gj(u)≤0,j∈i;
11、g1(u)=a1-bf,g2(u)=bf-b1;
12、g3(u)=a2-ds,g4(u)=ds-b2;
13、a1为bf下限值,b1为bf上限值,a2为ds下限值,b2为ds上限值,即a1≦bf≦b1,a2≦ds≦b2;a1、b1、a2、b2由光刻机透镜投影系统和光刻胶厚度确定;
14、opc光刻模型的目标函数j(u)的收敛条件分为随机方向误差ε1和精确搜索法误差ε2,满足0≤ε2<ε1<1。
15、较佳的,所述随机方向法模块,通过随机生成的满足约束条件的镜头光学焦点(beam focus)和偏移焦点(defocus start)的可行点和可行方向,找出目标函数值下降最快的可行方向,进行线搜索获得搜索步长,从而获得下一个可行点,然后再进行重复操作,直至最终找到满足误差条件的可行点,并将此可行点作为精搜初始可行点输出到精确搜索法模块;
16、所述精确搜索法模块,根据所述精搜初始可行点,把光刻模型(litho model)的目标函数转化为序列二次规划(sqp)目标函数,根据所述参数约束条件和收敛条件,求序列二次规划(sqp)目标函数的解,得出最优的opc光刻模型(litho model)的镜头光学焦点(beamfocus,bf)参数和偏移焦点(defocus start,ds)参数。
17、较佳的,所述随机方向法模块的工作过程包括以下步骤:
18、①设置随机方向法计算精度ε1;
19、②随机选择一个可行点作为随机初始点u0;
20、③产生k个n维随机单位向量ej(j=1,2,...,k),k为正整数;
21、④取实验步长a0,计算出k个随机点uj;
22、⑤在k个随机点中,找出可行的随机点ul,产生可行搜索方向d,d=ul-u0;
23、⑥从随机初始点u0出发,以可行搜索方向d以试验步长a0进行迭代计算,直到搜索到一个满足全部搜索条件,且目标函数值不再下降的新点u;
24、⑦若收敛条件满足|j(ul)-j(u0)|<ε1,停止迭代,否则,令u0赋值为ul,u0←ul,转步骤②。
25、较佳的,随机初始点u0的生成过程为:
26、首先在区间(0,1)内产生2个伪随机数q1、q2;然后,
27、bf0=a1+q1*(b1-a1);ds0=a2+q2*(b2-a2);u0=[bf0,ds0]t。
28、较佳的,步骤③中,产生k个n维随机单位向量ej的方法为:
29、根据在(-1,1)区间内产生的伪随机数rij,得到随机单位向量ej,
30、
31、较佳的,精确搜索法模块,根据当前迭代可行点为uk,采用sqp算法得到可行搜索方向dk及相应拉格朗日(lagrange)乘子λj:
32、使最小,
33、并且,
34、其中,hk为拉格朗日(lagrange)函数的关于u的二阶导数矩阵令下一个迭代点为uk+1=uk+dk,λj为拉格朗日常数。
35、较佳的,所述精确搜索法模块,采用的sqp算法包括以下步骤:
36、s0.给出初始点u0,初始对称正定矩阵h0,另k:=0
37、s1.在uk处,使最小,
38、并且,求解得到解dk;
39、s2.令uk+1=uk+μkdk,其中步长μk由线搜索得到;
40、s3.修正hk得hk+1,使得hk+1保持对称正定;
41、s4.使k:=k+1,返回s1。
42、较佳的,还设置最优参数优化解输出模块;
43、所述最优参数优化解输出模块,用于输出最终的opc光刻模型(litho model)的镜头光学焦点(beam focus)和偏移焦点(defocus start)最优参数组合。
44、较佳的,所述最优参数优化解输出模块同时输出目标函数j(u)值从小到大排序的opc光刻模型(litho model)的镜头光学焦点(beam focus)和偏移焦点(defocus start)最优参数组合。
45、本发明的opc光刻模型(litho model)参数优化方法,针对opc光刻模型(lithomodel)建模过程中镜头光学焦点(beam focus,bf)和偏移焦点(defocus start,ds)等参数难以快速准确找到其最优匹配参数的问题,首先运用随机方向搜索法快速找到镜头光学焦点(beam focus,bf)和偏移焦点(defocus start,ds)多个局部极小点附近的初步参数次优组合,再针对这些次优参数组合采用精确搜索法最终获得镜头光学焦点(beam focus,bf)和偏移焦点(defocus start,ds)最优参数组合。实该opc litho model参数优化系统,随机方向搜索法搜索与精确搜索法相结合,无需人为设定初始搜索点即能快速找出最优参数解,且算法收敛速度快,鲁棒性强,可以快速、准确地获得opc光刻模型(litho model)建模过程中镜头光学焦点(beam focus,bf)和偏移焦点(defocus start,ds)等参数。该方法也适用于3维及以上维数的opc光刻模型(litho model)的参数优化。
本文地址:https://www.jishuxx.com/zhuanli/20240618/27996.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。