用于确定固定于车辆的惯性传感装置在机动车中的安装姿态的方法和设备与流程
- 国知局
- 2024-06-21 12:35:45
本发明涉及一种具有安装的或固定于车辆布置的惯性传感装置的机动车,该惯性传感装置特别是用于辅助移动设备、例如数据眼镜的跟踪。此外,本发明涉及用于基于用于检测移动设备的姿态的跟踪系统和移动设备的惯性传感装置来确定固定于车辆的惯性传感装置的安装姿态的措施。
背景技术:
1、数据眼镜(也称为头戴式显示器)是已知的,其可以借助显示装置在数据眼镜的佩戴者的视野中在一个或两个显示面上显示图像。显示面可以对应于反射面,所述反射面将图像指向数据眼镜的佩戴者的眼睛。数据眼镜的观察开口是透明的,从而通过数据眼镜能够以习惯的方式感知真实环境。显示面位于观察开口中,使得能够与环境感知叠加地显示要显示的信息,例如文本、符号、图形、视频显示等。
2、信息通常可以接触模拟地呈现给数据眼镜的佩戴者,即,这样呈现信息,使得信息作为对象信息叠加于在真实环境中的所配设的特定对象或者说定向在该对象处,或者使得在数据眼镜或其佩戴者的特定定向上显示要显示的对象信息。
3、此外可以这样呈现接触模拟的对象信息,使得该对象信息相对于真实环境中的对象在透视上看起来是正确的,即,产生如下错觉,使得实际上已经给真实环境的对象补充了虚拟对象信息的附加特征。
4、然而,为了相应接触模拟地在数据眼镜的显示面上显示对象信息,需要知道对象在环境中的位置和用户的视线方向。用户的视线方向在佩戴数据眼镜时固定地与其眼镜姿态、即数据眼镜的3d位置以及3d定向相配设。
5、出于尽可能低延迟的检测和快速的姿态更新的原因,规定在数据眼镜中借助内部的姿态识别单元来确定数据眼镜的姿态。姿态识别单元通常具有眼镜惯性传感装置和计算装置、例如以微处理器形式的计算装置。借助眼镜惯性传感装置可以以加速度形式检测运动且将加速度通过积分换算成数据眼镜的当前眼镜姿态。集成在数据眼镜中的这种姿态识别单元由于积分而具有增大的姿态识别误差,该姿态识别误差可以借助跟踪系统的设置在数据眼镜外部的姿态识别装置来校正。这种外部姿态识别装置例如可以是基于摄像机的、特别是借助内部空间摄像机,该内部空间摄像机指向数据眼镜的佩戴者的头部,以便由此识别数据眼镜关于车辆坐标系的眼镜姿态。
6、对数据眼镜绝对姿态的眼镜内部检测的校正可以通过眼镜外部的但固定于车辆的跟踪系统来确定,其中,例如内部空间摄像机检测数据眼镜的佩戴者的头部并且通过评估摄像机图像要么确定头部的姿态并且从中推导出数据眼镜的眼镜姿态、要么直接检测并且确定数据眼镜的眼镜姿态。在这些所谓的外向内追踪系统中存在的困难在于,将在数据眼镜之外确定的绝对姿态数据特别是在无线通信连接的情况下以足够低的延迟传递给数据眼镜,从而数据眼镜能够相应地无延迟地或者以非干扰的延迟输出接触模拟的呈现。
7、另一种跟踪方法可以为数据眼镜设置分布式跟踪。为此,数据眼镜中的眼镜惯性传感装置以及车辆惯性传感装置需要固定地安装在车辆中或固定于车辆布置。除了改善数据眼镜的跟踪之外,车辆惯性传感装置对于改善车辆的定位准确度也可能是必要的。
8、对车辆惯性传感装置相对于车辆坐标系的安装状态/安装姿态的准确认识不仅对于数据眼镜的分布式跟踪而且对于辅助车辆定位是必要的。
9、通常,车辆惯性传感装置的安装姿势或位置要么由cad数据推导出、要么通过手动测量来确定。对于车辆中非固定地安装的惯性传感装置而言,大致的定向和姿态可以通过结构上的构造被预先给定,例如通过位于预先给定的设备中的移动设备被预先给定。
技术实现思路
1、本发明的任务是,提供一种用于确定固定地安装在车辆中的惯性传感装置的安装姿势的方法,该方法能够实现也在用于在车辆中可运动的终端设备、例如数据眼镜的跟踪方法的范畴内使用。
2、该任务通过一种根据权利要求1所述的用于在具有移动终端设备、特别是数据眼镜的显示系统中使用的用于确定固定于车辆安装的惯性传感器在车辆中的安装姿态的方法以及一种根据并列权利要求所述的显示系统来解决。
3、其它设计方案在从属权利要求中给出。
4、根据第一方面设置一种用于确定车辆惯性传感装置在车辆中的安装姿态的方法,该车辆具有能在车辆中运动的数据眼镜,该方法具有以下步骤:
5、借助固定于车辆的跟踪系统确定数据眼镜的眼镜姿态,以便在不同时刻分别获得在车辆坐标系中的绝对眼镜姿态;
6、通过车辆惯性传感装置检测车辆的加速度数据;
7、通过在数据眼镜中的眼镜惯性传感装置检测眼镜加速度数据;
8、根据绝对眼镜姿态、数据眼镜的加速度数据和车辆的加速度数据确定车辆惯性传感装置的安装姿态。
9、特别是可以使用车辆惯性传感装置的安装姿态,以便设置车辆惯性传感装置的安装姿态的校准,和/或改善数据眼镜的跟踪或车辆的定位。
10、此外,数据眼镜的加速度数据和/或车辆的加速度数据可以分别包括相对于至少一个空间方向的一个至三个平移加速度和/或一个至三个旋转加速度。
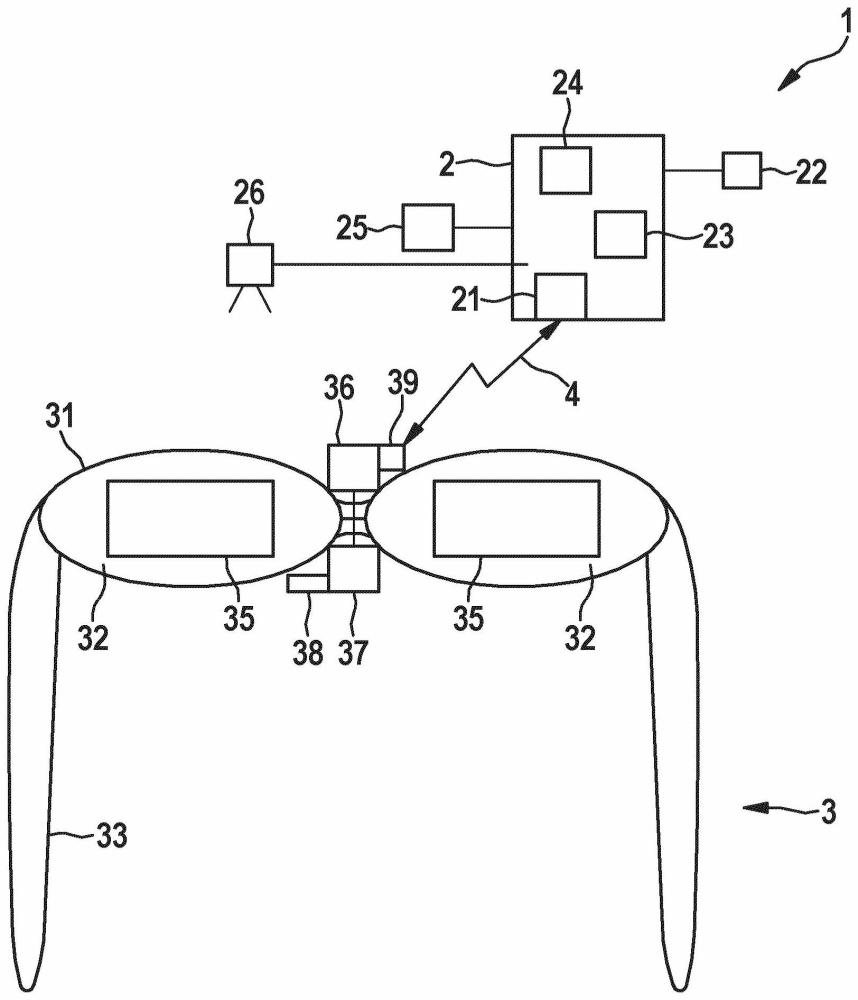
11、上述方法从一种在车辆中的具有数据眼镜的显示系统出发,其中,通过固定于车辆安装的跟踪系统来辅助跟踪。跟踪系统例如可以设置有指向驾驶员的内部空间摄像机连同摄像机图像评估装置或其它定位装置。跟踪系统具有精确已知的安装姿态,其例如可以由cad数据确定或者可以在制造的范畴内测量或调整。具有内部空间摄像机的跟踪系统可以通过检测佩戴数据眼镜的驾驶员或通过直接检测数据眼镜以本身已知的方式确定眼镜姿态。眼镜姿态基于内部空间摄像机相对于车辆坐标系的已知的安装姿态而存在。车辆坐标系固定地定向在车辆结构处且因此具有与跟踪系统或者内部空间摄像机的安装姿态的因此固定地定义且预先给定的关系。
12、数据眼镜设有眼镜惯性传感装置,以便设置数据眼镜相对于车辆坐标系的自身跟踪。眼镜惯性传感装置检测相对于一个或多个空间方向的平移加速度数据和/或旋转加速度数据。通过在数据眼镜中进行的评估,能够以非常高的频率进行数据眼镜的跟踪。然而,基于眼镜惯性传感装置的相对测量,通过加速度值的两次积分来确定姿态变化,这导致增加的误差。姿态变化相对于特定时刻确定,在该特定时刻基于对车辆内部的跟踪系统的评估而存在对绝对眼镜姿态的认识。由姿态变化和绝对眼镜姿态可以确定当前眼镜姿态。
13、此外,在车辆中可以设置有固定地布置的车辆惯性传感装置,以便提供用于眼镜跟踪的另一种校正可能性。例如也可以通过比较数据眼镜的加速度数据和车辆的加速度数据进行数据眼镜的跟踪。此外,车辆惯性传感装置也可以用于改善车辆的定位。
14、因此,数据眼镜的眼镜姿态不仅可以借助固定于车辆的跟踪系统、也可以借助车辆惯性传感装置确定。然而为此的重要前提是,内部空间摄像机和车辆惯性传感装置具有相对于车辆坐标系的固定关系。这对于内部空间摄像机来说由于安装情况能够以简单且已知的方式实现,而车辆惯性传感装置常常设置在电子模块中,这些电子模块不能稳定且稳健地以相对于车辆坐标系的固定关系布置在车辆中。
15、上述方法现在规定,基于借助跟踪系统确定的绝对眼镜姿态、眼镜惯性传感装置的加速度数据和来自车辆惯性传感装置的加速度数据确定车辆惯性传感装置的正确的实际的安装姿态。特别是,确定车辆惯性传感装置的定向与相对于车辆坐标系定义的参考安装姿态的偏差并且将该偏差作为校准信息提供。这种校准信息构成安装位置和安装定向的偏移。
16、通过评估特别是在数据眼镜在检测时间段期间相对于车辆坐标系相对运动时在两个时间上依次通过跟踪系统检测的绝对眼镜姿态之间的差值以及对数据眼镜和车辆的在该时间段检测到的加速度数据的双重时间积分来实现所述确定。
17、此外,车辆惯性传感装置的安装姿态可以根据对由绝对眼镜姿态的姿态变化、由眼镜惯性传感装置检测的加速度数据以及由车辆惯性传感装置检测的加速度数据组成的加速度平衡(beschleunigungsbilanz)的误差函数的最小化来确定。
18、根据另一方面设置一种用于确定车辆惯性传感装置在车辆中的安装姿态的显示系统,该车辆具有能在车辆中运动的数据眼镜,其中,该显示系统构造用于:
19、借助固定于车辆的跟踪系统确定数据眼镜的眼镜姿态,以便在不同时刻分别获得在车辆坐标系中的绝对眼镜姿态;
20、通过车辆惯性传感装置检测车辆的加速度数据;
21、通过在数据眼镜中的眼镜惯性传感装置检测眼镜加速度数据;
22、根据绝对眼镜姿态、数据眼镜的加速度数据和车辆的加速度数据确定车辆惯性传感装置的安装姿态。
本文地址:https://www.jishuxx.com/zhuanli/20240618/28074.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表