一种轨道式巡检机器人潜望式观察镜的制作方法
- 国知局
- 2024-06-21 12:35:37
本技术涉及巡检机器人观测,具体是一种轨道式巡检机器人潜望式观察镜。
背景技术:
1、双侧驱动轨道式巡检机器人,在火电厂输煤廊道中已取得大量应用。该类机器人利用“工”字型轨道,以侧驱动的方式,进行行走,依靠自身携带的传感器、热成像云台等,对输煤廊道沿线设备及人员,进行智能检测,例如,识别人员吸烟、安全帽佩戴、设备表面“跑冒滴漏”、墙面裂缝、管道裂缝等。
2、双侧驱动轨道式巡检机器人在进行巡检的过程中,除了需要利用摄像装置采集被检测物体外形特征,还需要利用热成像技术对被检测物体的内部进行检测。通过热成像技术可以由红外探测器和光学成像物镜接受被测目标的红外辐射能量分布图形,反映到红外探测器的光敏元件上,从而获得红外热图像。
3、现有热成像云台一般安装在轨道式巡检机器人的底部,视野范围可覆盖机器人四周及以下区域,但因机器人自身阻挡,使得机器人无法对其顶部以上空间的管道、墙面裂分进行有效观测,存在视野盲区。
技术实现思路
1、为了克服现有轨道式巡检机器人的热成像云台一般安装至其底部,因机器人自身阻挡,使得机器人无法对其顶部以上空间的管道、墙面裂分进行有效观测,存在视野盲区的不足,本申请实施例提供一种轨道式巡检机器人潜望式观察镜,通过在巡检机器人机体的一侧设置由z字型第一潜望镜和第二潜望镜组成的潜望组件,并在其另一侧设置反光架,可以借助光线反射,使摄像装置通过第一潜望镜和第二潜望镜采集巡检机器人机体顶部水平方向的环境图像,并借助反光架的底部镜面和顶部镜面,采集巡检机器人机体顶部竖直方向的环境图像,有利于摄像装置对巡检机器人机体顶部以上空间的管道、墙面裂分进行有效观测。
2、本申请实施例解决其技术问题所采用的技术方案是:
3、一种轨道式巡检机器人潜望式观察镜,包括潜望组件、仰望组件和巡检机器人机体,仰望组件设置于潜望组件的一侧;
4、巡检机器人机体位于潜望组件和仰望组件之间;
5、其中,所述巡检机器人机体的底部设置有摄像装置,所述潜望组件由顶部向底部运动,使其底部位于摄像装置的一侧,采集水平方向的环境图像,所述仰望组件由底部向底部运动,使其底部位于摄像装置的一侧,采集顶部的环境图像。
6、在一种可能的实现方式中,所述潜望组件包括第二潜望镜和第一潜望镜,所述第一潜望镜的长度长于第二潜望镜的长度,所述第一潜望镜的顶部朝向巡检机器人机体一侧的顶部,所述第二潜望镜顶部的朝向与第一潜望镜的朝向相反。
7、在一种可能的实现方式中,所述仰望组件包括反光架,所述反光架的截面为三角形,所述反光架斜面的底部加工有入射槽口,所述反光架的底部内壁和顶部内壁均加工成镜面,所述入射槽口一侧加工成开口。
8、在一种可能的实现方式中,所述巡检机器人机体的顶部设置有挂轨,所述巡检机器人机体的两侧均装配式连接有挂臂,所述巡检机器人机体顶部的两侧均装配式连接有驱动轮,两个所述挂臂顶部的一侧均搭在挂轨的底部,两个所述驱动轮的一端均支撑于挂轨的底部。
9、在一种可能的实现方式中,所述仰望组件和一个挂臂之间设置有控制组件,所述控制组件包括固定座,所述固定座的底部装配式连接有电动推杆,所述控制组件还设置有一个,其位于潜望组件和另一个挂臂之间,所述固定座的顶部与挂臂装配式连接。
10、在一种可能的实现方式中,所述反光架一侧的顶部和底壁内壁之间加工有背板,所述背板的一侧装配式连接有转接臂,所述电动推杆的活动端从固定座的内部伸出,并与转接臂的顶部装配式连接。
11、在一种可能的实现方式中,所述第一潜望镜和第二潜望镜底部的外壁均加工有搭接块,所述搭接块一端的一个拐角底部加工有限位槽口,所述限位槽口的顶部内壁加工有限位杆,两个所述搭接块的底部设置有同一个搭接台,两个所述限位杆均插接式连接在搭接台一端的内部,使两个搭接块一端的表面相贴合,所述搭接台的另一端与一个电动推杆的活动端装配式连接。
12、在一种可能的实现方式中,所述搭接台和转接臂的顶部均加工有导向杆,两个所述导向杆分别滑动式连接在两个固定座的内部。
13、综上所述,本实用新型包括以下至少一种有益技术效果:
14、1、通过在巡检机器人机体的一侧设置由z字型第一潜望镜和第二潜望镜组成的潜望组件,并在其另一侧设置反光架,可以借助光线反射,使摄像装置通过第一潜望镜和第二潜望镜采集巡检机器人机体顶部水平方向的环境图像,并借助反光架的底部镜面和顶部镜面,采集巡检机器人机体顶部竖直方向的环境图像,有利于摄像装置对巡检机器人机体顶部以上空间的管道、墙面裂分进行有效观测,最大程度上消除视野盲区;
15、2、通过在反光架的顶部设置控制组件,并在第一潜望镜和第二潜望镜一侧的顶部设置控制组件,可以借助控制组件上的电动推杆工作时,带动反光架、第一潜望镜和第二潜望镜上下运动,方便在不进行巡检机器人机体顶部水平方向和竖直方向上的观测工作时,消除摄像装置四周的阻挡。
16、附图说明
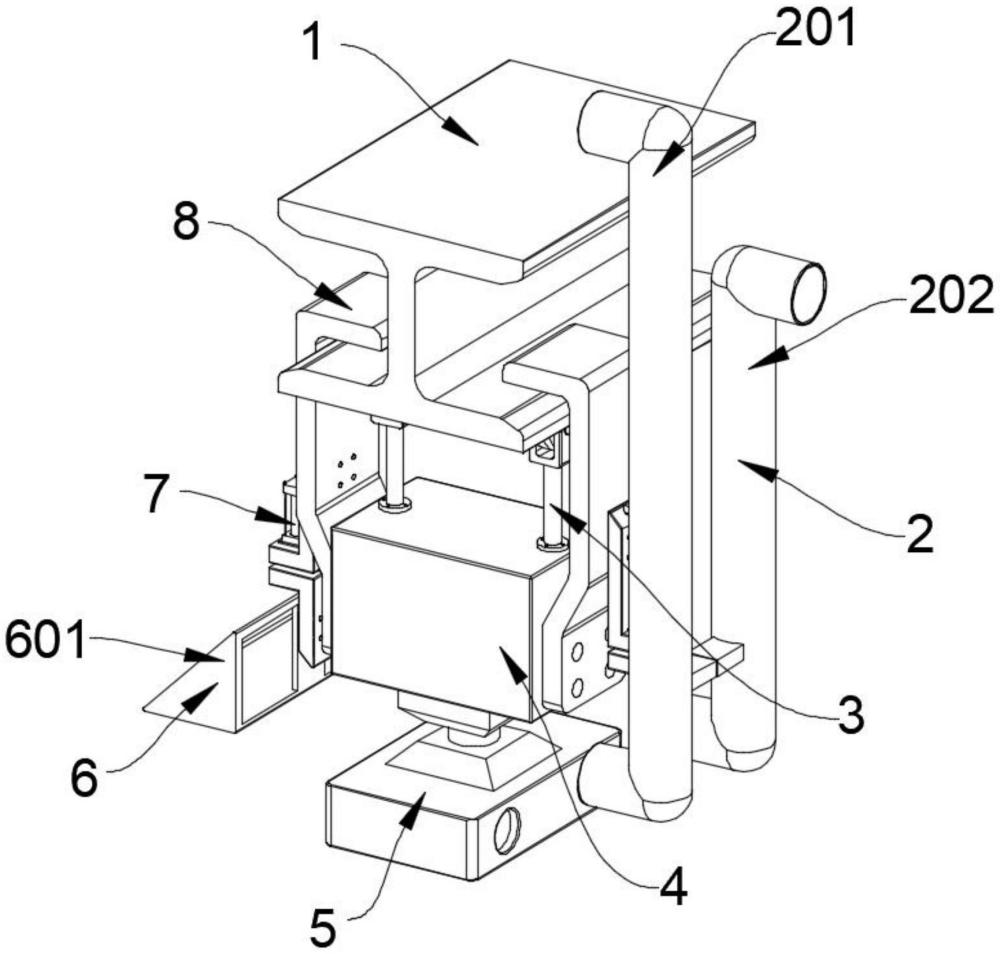
17、图1为本实用新型的整体结构示意图;
18、图2为本实用新型仰望组件和控制组件的连接结构示意图;
19、图3为本实用新型潜望组件和控制组件的爆炸图;
20、图4为本实用新型图3中a部的放大示意图。
技术特征:1.一种轨道式巡检机器人潜望式观察镜,其特征在于,包括:
2.如权利要求1所述的一种轨道式巡检机器人潜望式观察镜,其特征在于:所述潜望组件(2)包括第二潜望镜(202)和第一潜望镜(201),所述第一潜望镜(201)的长度长于第二潜望镜(202)的长度;
3.如权利要求2所述的一种轨道式巡检机器人潜望式观察镜,其特征在于:所述仰望组件(6)包括反光架(601),所述反光架(601)的截面为三角形,所述反光架(601)斜面的底部加工有入射槽口(602);
4.如权利要求3所述的一种轨道式巡检机器人潜望式观察镜,其特征在于:所述巡检机器人机体(4)的顶部设置有挂轨(1),所述巡检机器人机体(4)的两侧均装配式连接有挂臂(8),所述巡检机器人机体(4)顶部的两侧均装配式连接有驱动轮(3);
5.如权利要求4所述的一种轨道式巡检机器人潜望式观察镜,其特征在于:所述仰望组件(6)和一个挂臂(8)之间设置有控制组件(7),所述控制组件(7)包括固定座(701),所述固定座(701)的底部装配式连接有电动推杆(702);
6.如权利要求5所述的一种轨道式巡检机器人潜望式观察镜,其特征在于:所述反光架(601)一侧的顶部和底壁内壁之间加工有背板(603),所述背板(603)的一侧装配式连接有转接臂(604);
7.如权利要求6所述的一种轨道式巡检机器人潜望式观察镜,其特征在于:所述第一潜望镜(201)和第二潜望镜(202)底部的外壁均加工有搭接块(203),所述搭接块(203)一端的一个拐角底部加工有限位槽口(205),所述限位槽口(205)的顶部内壁加工有限位杆(206),两个所述搭接块(203)的底部设置有同一个搭接台(204);
8.如权利要求7所述的一种轨道式巡检机器人潜望式观察镜,其特征在于:所述搭接台(204)和转接臂(604)的顶部均加工有导向杆(703),两个所述导向杆(703)分别滑动式连接在两个固定座(701)的内部。
技术总结本申请提供了一种轨道式巡检机器人潜望式观察镜,涉及巡检机器人观测技术领域,包括潜望组件、仰望组件和巡检机器人机体,巡检机器人机体的底部设置有摄像装置,潜望组件包括第二潜望镜和第一潜望镜,仰望组件包括反光架,反光架的截面为三角形,反光架斜面的底部加工有入射槽口,反光架的底部内壁和顶部内壁均加工成镜面;其技术要点为:通过在巡检机器人机体的一侧设置第一潜望镜和第二潜望镜组成的潜望组件,并在其另一侧设置反光架,可以借助光线反射,使摄像装置通过第一潜望镜和第二潜望镜采集巡检机器人机体顶部水平方向的环境图像,并借助反光架的底部镜面和顶部镜面,采集巡检机器人机体顶部竖直方向的环境图像,缩小视野盲区。技术研发人员:张学锋,王伟华,李晓鹏,郭梦婷,冯涛,吴占峰,刘佳明,谢昂,何惠云,张永丽,王辉,何颖,尹延宁受保护的技术使用者:国能浙能宁东发电有限公司技术研发日:20231205技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240618/28063.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表