一种适用于大口径空间望远镜的二维转台
- 国知局
- 2024-06-21 12:37:30
本发明涉及的一种适用于大口径空间望远镜的二维转台,特别适用于大口径、大负载的空间望远镜,同样,本发明所涉及的核心技术或思想同样适用于其它二维转动机构的运动场景,如:指向镜、机械臂等。
背景技术:
1、空间望远镜在星间或星地通信中,由于距离远、光束窄及存在外界干扰等因素影响,需要配套二维转台完成光学跟瞄,包括捕获、跟踪和瞄准功能。通常空间望远镜口径越大,轴系的跳动量、正交性等指标也越难控制,因此,大口径、大负载的空间望远镜需要针对性设计二维转台,本发明也以此为出发点。
2、二维转台作为空间望远镜粗跟踪模块的执行单元,其技术水平的发展与空间适应性对整个星地、星间光通信的实现均起着至关重要的作用。通过查阅文献,国内外星载二维转台从构型上分为l型跟踪架式机构和u型跟踪架式机构两种。
3、l型跟踪架式机构通常在望远镜的前面放置两个正交布置的一维扫描结构平面镜。一个用于方位全周扫描,一个用于俯仰全周扫描,构成潜望两维周扫伺服结构,因此特别适合大范围跟瞄场景。由于内部两个平面反射镜都采用45°放置,所以,平面镜的尺寸较小,增加对轴系内部空间的利用率。另外,其光学基台的各个组件基本不运动,系统稳定性较高,但由于结构整体外形较大,在跟瞄过程中,其对准精度相对不高。
4、u型跟踪架式机构采用在u型架底部安装方位轴系和顶端两侧安装俯仰轴系的方式建立,优点是刚度高、精度可靠,易于实现半球甚至更大立体空间扫描和指向,多应用于链路距离较远的激光通信系统。但由于u型架需跟随整个镜筒完成方位转动,因此,方位转动负载较大,特别是对于大口径、大负载的空间望远镜而言,由于镜筒自身质量过大,导致质心偏离远、力学性能差等问题,同时,还会严重降低地面锁紧和在轨解锁装置的可靠性。
5、本发明综合上述结构的优缺点,对二维转台进行设计,主要思路如下:为了提高稳定性,u型架保持固定,在u型架两侧安装俯仰轴系,中间独立设计方位轴系,俯仰轴系可相对u型架独立转动,方位轴系可相对俯仰轴系独立转动,轴系内可安装两块45°平面镜,提高对轴系内的空间利用率。望远镜镜筒侧面通过转接件固定在方位传动轴的一端,镜筒背面则通过热切割器固定在基板上,在轨后可电控解锁,因此,便将有效负载从二维转台上分离了出去,大幅度提高了光机的力学性能与可靠性。
技术实现思路
1、本发明所述二维转台是一种应用到大口径空间望远镜的运动装置,用于完成空间激光通信的自动捕获、跟踪、瞄准等任务。
2、二维转台采用关节式构型,俯仰转动在外,方位转动在内。对于俯仰轴系和方位轴系的支承构型上,均采用一端固定一端游动的方式,能够提高轴系的刚度与旋转精度,还能消除由热胀冷缩引起热应力;为了满足通光要求,设计有配套光学组件,其中,内光路固定在方位轴内部,可随俯仰转动,不随方位转动;在俯仰和方位两维转动过程中,能始终保持光轴与转动轴的共线。
3、本发明所述二维转台包括u型架、俯仰轴系、方位轴系和光学组件,其中:
4、所述的u型架是主支撑承载件,用于安装固定俯仰轴系、方位轴系以及光学组件;俯仰轴系包括俯仰传动轴固定段、俯仰传动轴承载框、俯仰传动轴游动段和俯仰电机组件,其中,固定段和游动段分别安装在u型架左右两侧,承载框位于u型架中间,三者组合加工,同轴度优于3μm,在俯仰电机组件驱动下可相对于u型架独立转动;方位轴系安装于俯仰轴系的承载框上,包括方位外壳、方位传动轴、方位电机组件及望远镜转接件,其中,方位传动轴采用一体设计,在方位电机组件驱动下可相对于俯仰轴系独立转动,望远镜转接件用于连接小/中/大口径的镜筒;光学组件包括内光路和外光路两部分,其中,内光路安装在方位轴系的方位外壳上,用于将来自望远镜的光线反射至外光路,外光路安装在u型架一侧,可将来自内光路的光线反射到外部。
5、本发明特点:
6、1)本发明所述二维转台可实现-90°~+45°俯仰转动,-32°~+32°的方位转动,能够满足空间激光通信的自动捕获、跟踪、瞄准等任务。
7、2)本发明所述二维转台的光轴与转动轴重合,结构上更为紧凑,空间利用率更高;
8、3)本发明所述二维转台可用于大负载、大行程的空间望远镜跟瞄任务;
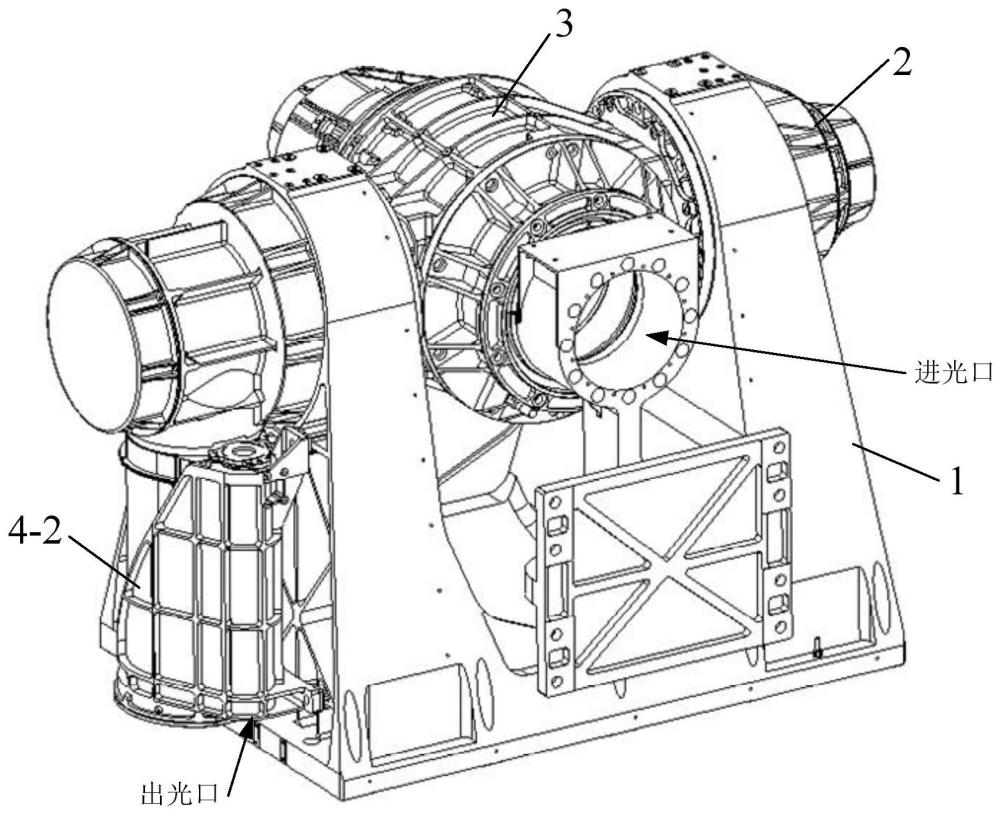
技术特征:1.一种适用于大口径空间望远镜的二维转台,包括u型架(1)、俯仰轴系(2)、方位轴系(3)及光学组件(4),其特征在于:
2.根据权利要求1所述的一种适用于大口径空间望远镜的二维转台,其特征在于:所述的u型架(1)是主支撑件,其材料为45%的铝基碳化硅,并且在u型架(1)侧面和底面,增加斜筋实现轻量化设计。
3.根据权利要求1所述的一种适用于大口径空间望远镜的二维转台,其特征在于:所述的俯仰轴系(2)在支承构型上采用一端固定一端游动的方式,俯仰轴系(2)包括俯仰传动轴固定段(2-1)、俯仰传动轴承载框(2-2)、俯仰传动轴游动段(2-3)和俯仰电机组件(2-4),其中,固定段(2-1)采用一对背靠背的角接触轴承,游动段(2-3)采用一对面对面的角接触轴承,分别安装在u型架(1)左右两侧;承载框(2-2)安装在固定段(2-1)和游动段(2-2)中间,三者拼接组成俯仰传动轴,要求组合加工,在俯仰电机组件(2-4)驱动下相对于u型架(1)独立转动;俯仰电机组件(2-4)包括电机、旋变及轴承,安装在游动段(2-3)一侧。
4.根据权利要求1所述的一种适用于大口径空间望远镜的二维转台,其特征在于:所述的方位轴系(3)包括方位外壳(3-1)、方位传动轴(3-2)、方位电机组件(3-3)及望远镜转接件(3-4),其中,方位传动轴(3-1)采用一体设计,望远镜转接件(3-4)用于连接小/中/大口径的镜筒;在支承构型上,方位传动轴(3-1)采用一端固定一端游动的支撑方式,其固定端采用一对背靠背安装的角接触轴承,游动端采用深沟球轴承支承,以消除由热胀冷缩引起部分热应力;在方位轴系(3)的游动端一侧安装有方位电机组件(3-3),包括电机、旋变及深沟球轴承。
5.根据权利要求1所述的一种适用于大口径空间望远镜的二维转台,其特征在于:所述的光学组件(4)包括内光路(4-1)和外光路(4-2)两部分,其中,内光路(4-1)安装在方位轴系(3)的方位外壳(3-1)上,用于将来自望远镜的光线反射至外光路(4-2),外光路(4-2)安装在u型架(1)一侧,将来自内光路(4-2)的光线反射到外部。
技术总结本发明所述二维转台是一种应用于大口径空间望远镜的运动机构,用于完成空间激光通信的自动捕获、跟踪、瞄准等任务。二维转台采用关节式构型,包括U型架、俯仰轴系、方位轴系和光学组件。俯仰轴系安装在U型架上,其传动轴由三段拼接而成,包括俯仰传动轴固定段、俯仰传动轴承载框和俯仰传动轴游动段,三者组合加工,同轴度优于3μm,在俯仰电机驱动下可相对于U型架独立转动(即俯仰转动);方位轴系整体安装在俯仰轴系的承载框上,其方位传动轴采用一体化设计,在方位电机驱动下可相对于俯仰轴系独立转动(即方位转动),此外,方位轴内部安装有光学反射镜,用于通光,在俯仰和方位两维转动过程中,能始终保持光轴与转动轴的共线。最后,本发明所述ATP二维转台可实现‑90°~+45°俯仰转动,‑32°~+32°的方位转动,能够满足望远镜的跟踪任务要求。技术研发人员:周成林,刘云鹏,张亮,舒嵘,黄冠杰,刘重飞受保护的技术使用者:中国科学院上海技术物理研究所技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240618/28271.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表