一种绘图机器人的制作方法
- 国知局
- 2024-06-21 13:04:57
本发明涉及一种绘图装置,尤其是一种绘图机器人。
背景技术:
1、目前,在现有的绘图机械装置中,其主要结构为一个支撑体,然后在支撑体上设置有左右两个可以弯曲的画臂,最后在画臂的前端夹持一根画笔,通过控制两个画臂的转动,进而完成绘画工作,对于现有的这种绘图装置存在以下问题。
2、1、因为在绘图时,每完成一笔的绘图后,都需要将整个支撑平台抬起,从而带动机械臂和画笔一同升降,这样才能实现抬笔的功能,由于现有的抬笔机构是设置在支撑体内,而画笔是位于机械臂的前端,所以用于带动画笔升降的支撑点距离画笔本身太远,使得画笔在起落过程中很不稳定,进而导致画笔下落的过程中会在画纸上出现多个点,最终影响整幅画的质量。
3、2、同一侧的画臂分前后两段,现有的绘图装置中,这前后两段的画臂之间是通过普通的深沟球轴承连接,因此无法对两段画臂进行更好的固定,如果对两段画臂上下压的力过大,就会导致两段画臂之间无法正常活动(转动),如果对两段画臂上下压的力过松,这样就会导致两段画臂之间的间隙过大,无法控制画臂整体的水平度,这种情况下不管是抬笔还是绘图,随着画臂的运动,前端的画臂都会出现上下晃动的情况,画臂之间的空隙越大,晃动的幅度就越大,从而造成拖笔的现象。
4、3、现有的绘图装置中,画臂呈水平设置,并且画笔是固定在画臂的前端,所以在安装画笔时就需要注意画笔安装的位置,如果画笔安装太靠下,在绘图时,笔尖就会在纸面上压的太重,这不仅会导致画笔的损坏,而且绘出的图效果也不好,同样导致绘画变形,如果画笔安装的太靠上,此时笔尖与离纸面之间就容易出现空隙,导致绘出的图线条不清晰。
5、4、现有技术中为了消除电机在正反转变化时,齿轮间的回转间隙(虚位),所以在左右两个画臂上安装有扭簧,安装的扭簧虽然解决了回转间隙的情况,但是由于其扭簧是直接套在画臂末端的连接轴上,所以其安装起来非常复杂繁琐,不便于扭簧的更换,同时当两个画臂之间分离的角度过大时,还会导致扭簧的受力不均衡。
技术实现思路
1、本发明的技术任务是针对以上现有技术的不足,而提供一种绘图机器人。
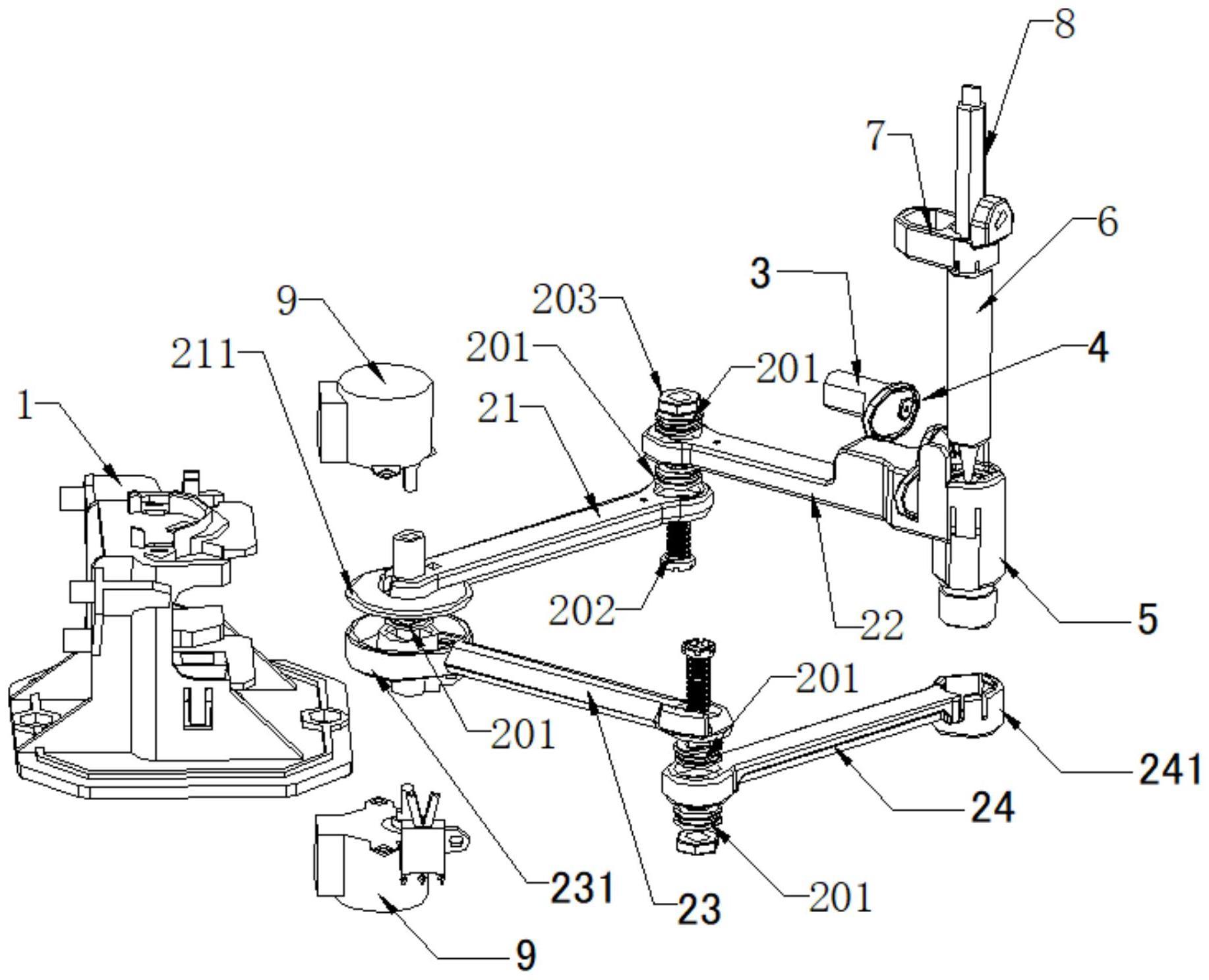
2、本发明解决其技术问题所采用的技术方案是:一种绘图机器人,包括主体支架、画臂和电机,其中所述画臂的末端与主体支架连接,所述画臂倾斜设置,画臂与水平面的倾斜角α为0.5~3度,所述画臂包括左下臂、左上臂、右上臂、右下臂,所述左下臂的末端与右上臂的末端通过平面推力轴承连接,在所述右上臂的末端设有环形的凹槽,在所述凹槽内设有拉簧,所述拉簧的两端分别与右上臂和左下臂的末端连接,在所述左下臂的末端设有扣盖,扣盖与凹槽相吻合,将拉簧封闭在凹槽内,在所述扣盖的上方与凹槽的下方各设有一个电机,两个电机分别用于驱动左下臂和右上臂,所述右上臂的前端与右下臂的末端通过平面推力轴承和螺丝、螺母连接,在所述右下臂的前端设有插筒,所述左下臂的前端与左上臂的末端通过平面推力轴承和螺丝、螺母连接,在所述左上臂上设有抬笔电机,在所述抬笔电机上连接有凸轮,在所述左上臂的前端设有外套筒,在所述外套筒内滑动设有内套筒,在所述内套筒的顶部设有画笔支架。凸轮位于画笔支架下方,外套筒的底部插入插筒内。
3、进一步改进:在所述主体支架内设有与画臂末端连接的支撑平台,所述支撑平台倾斜设置,支撑平台的倾斜角为α。
4、进一步改进:所述主体支架包括支撑架和底座,所述底座倾斜设置,所述底座的倾斜角为α。
5、本发明的优点:1、采用小型直流减速电机作为抬笔电机,然后将抬笔电机设置在左上臂上,通过转动凸轮完成抬笔工作,这样极大的缩小了抬笔过程中的力臂长度,使得整个抬笔机构变的简单便于安装,同时抬笔的速度及稳定性也得到大幅度提高,避免了在落笔或抬笔过程中,由于画笔的不稳定在画纸上出现多个画点的情况,提高了最终图画的质量。
6、2、本发明中,在各关节连接处均采用平面推力轴承连接,这样在轴承的轴向上就可以通过螺丝、螺母,或者其他的结构对平面推力轴承的两端进行很好的限位,从而消除同一侧上下两个画臂之间的间隙,确保了画臂整体的水平度,最终就避免了在抬笔或绘图是出现的拖笔现象。
7、3、由于画臂是倾斜设置,所以在绘图时,画臂越往前伸画臂前端距离画纸的距离就越小,同时画笔是安装在内套筒内,而内套筒可以在外套筒内自由滑动,所以在绘图时,画笔受自重落在画纸上,不受画纸平整度的影响,在任何位置都可以确保笔尖与画纸能良好的接触,便于用户对画笔的安装,同时因为画臂是倾斜设置,所以画笔与画纸之间并不是垂直关系,这样在绘图过程中,画臂在移动过程中会给画笔一个向下的分力,这样的绘图方式更接近人的手臂绘图。
8、4、将拉簧设置在凹槽内,然后在拉簧的两端分别连接左下臂和右上臂,这不仅可以消除齿轮正反转变化时的回转间隙,而且拉簧的安装和拆卸都很简单方便,拉簧对画笔的受力更加均匀。
技术特征:1.一种绘图机器人,包括主体支架、画臂和电机,其特征在于:所述画臂的末端与主体支架连接,所述画臂倾斜设置,画臂与水平面的倾斜角α为0.5~3度,所述画臂包括左下臂、左上臂、右上臂、右下臂,所述左下臂的末端与右上臂的末端通过平面推力轴承连接,在所述右上臂的末端设有环形的凹槽,在所述凹槽内设有拉簧,所述拉簧的两端分别与右上臂和左下臂的末端连接,在所述左下臂的末端设有扣盖,在所述扣盖的上方与凹槽的下方各设有一个电机,所述右上臂的前端与右下臂的末端通过平面推力轴承和螺丝、螺母连接,在所述右下臂的前端设有插筒,所述左下臂的前端与左上臂的末端通过平面推力轴承和螺丝、螺母连接,在所述左上臂上设有抬笔电机,在所述抬笔电机上连接有凸轮,在所述左上臂的前端设有外套筒,在所述外套筒内滑动设有内套筒,在所述内套筒的顶部设有画笔支架。
2.根据权利要求1所述的一种绘图机器人,其特征在于:在所述主体支架内设有与画臂末端连接的支撑平台,所述支撑平台倾斜设置,支撑平台的倾斜角为α。
3.根据权利要求1所述的一种绘图机器人,其特征在于:所述主体支架包括支撑架和底座,所述底座倾斜设置,所述底座的倾斜角为α。
技术总结本发明公开了一种绘图机器人,包括主体支架、画臂和电机,画臂的末端与主体支架连接,画臂倾斜设置0.5~3度,画臂包括左下臂、左上臂、右上臂、右下臂,画臂的各关节处采用平面推力轴承连接,使得画臂直线度的一致性更容易控制,在右上臂的末端设有环形的凹槽,在凹槽内设有拉簧,拉簧的两端分别与右上臂和左下臂的末端连接,在左上臂上设有抬笔电机,在抬笔电机上连接有凸轮,在左上臂的前端设有外套筒,在外套筒内滑动设有内套筒,在内套筒的顶部设有画笔支架,本发明的抬笔机构以及拉簧的安装都简单方便,通过将画臂倾斜设置,以及内外套筒的配合,使得画笔与画纸的接触变的更加自然,确保了画笔与画纸的良好接触,解决了现有技术中的拖笔现象。技术研发人员:孙立波,陈麟飞,成润泽受保护的技术使用者:前海硕仟科技(深圳)有限公司技术研发日:技术公布日:2024/1/15本文地址:https://www.jishuxx.com/zhuanli/20240618/31003.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表