一种工业机器人落地式模块化组合教学工作站及系统的制作方法
- 国知局
- 2024-06-21 14:08:36
本发明涉及机器人,尤其涉及一种工业机器人落地式模块化组合教学工作站及系统。
背景技术:
1、但目前相关的教学设备十分匮乏,而已有的工业机器人教学设备仅针对某一工艺功能或加工过程,且结构分散,整体性和紧凑性差,自动化集成度低,不能充分满足教学需求,因此通过设计一种集多功能于一体,能够充分满足教学需求,结构整体性和紧凑性好,自动化集成度高的多功能工业机器人教学工作站,从而使得工业机器人教学工作站的自动化集成度高,能够充分满足教学需求。
2、在汽车轮毂的教学过程中,通常需要以工业实际生产的“汽车轮毂”为载体,剖析轮毂从铸造毛坯到成品整个工艺过程,但是现有的教学工作站不能一机多用,只能满足入门的教学需求,学员需要继续精进学习则需要使用另外的教学工作站进行教学,从而降低了教学工作站的适用范围。
技术实现思路
1、本发明的目的在于提供一种工业机器人落地式模块化组合教学工作站及系统,解决了现有的教学工作站不能一机多用,只能满足入门的教学需求,学员需要继续精进学习则需要使用另外的教学工作站进行教学,从而降低了教学工作站的适用范围的技术问题。
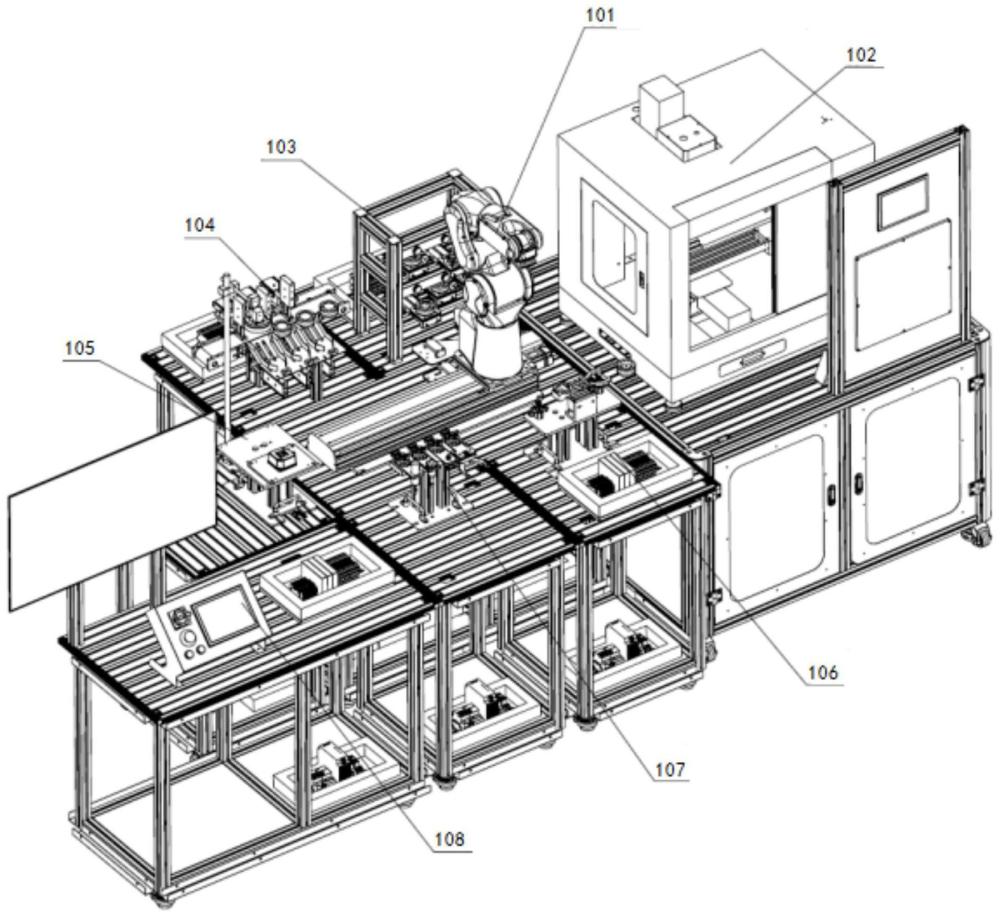
2、为实现上述目的,本发明提供了一种工业机器人落地式模块化组合教学工作站,包括行走工业机器人平台、数控加工平台、立体仓储平台、输送线分拣平台、智能检测平台、翻转打磨平台、快换工具平台和总控平台,所述行走工业机器人平台用于实现工业机器人的行走,所述数控加工平台用于对物料进行数控加工,所述立体仓储平台用于对物料进行存储,所述输送线分拣平台用于对物料进行分拣,所述智能检测平台用于对物料进行识别检测,所述翻转打磨平台用于对加工后的轮毂进行翻转打磨,所述快换工具平台用于快速进行工具的切换,所述总控平台用于实现全流程逻辑控制、订单派发、加工信息显示、设备状态显示。
3、其中,所述行走工业机器人平台由可移动式工作台、行走轴模组、工业机器人以及部分电器元件组成。
4、其中,所述数控加工平台由可移动式工作台、小型数控铣床、以及部分电器元件组成。
5、其中,所述立体仓储平台由可移动式工作台、小型立体仓储以及部分电器元件组成。
6、其中,所述输送线分拣平台由可移动式工作台、物料输送线、阻挡气缸、推料气缸、分拣放置工位以及部分电器元件组成。
7、其中,所述智能检测平台由可移动式工作台、视觉检测套件、rfid检测套件以及部分电器元件组成。
8、本发明还提供了一种工业机器人落地式模块化组合教学系统,包括plc总控系统和mes系统,所述plc总控系统用于控制行走工业机器人平台、数控加工平台、立体仓储平台、输送线分拣平台、智能检测平台、翻转打磨平台、快换工具平台和总控平台之间的逻辑流程,所述mes系统用于进行订单管理、设备管理和信息显示。
9、本发明的一种工业机器人落地式模块化组合教学工作站及系统,通过所述行走工业机器人平台来控制机器人的行走,通过所述数控加工平台来对物料进行数控加工,通过所述立体仓储平台来对物料进行存储,通过所述输送线分拣平台来进行物料的分拣,通过所述智能检测平台来对物料进行识别检测,通过所述翻转打磨平台来实现轮毂的翻转打磨,通过所述快换工具平台来快速进行工具的切换,通过所述总控平台来实现对各平台进行控制,由于教学工作站可进行各个平台之间的随意组合,从而实现了由浅入深进阶式的教学实训,进而提高了教学工作站的适用范围。
技术特征:1.一种工业机器人落地式模块化组合教学工作站,其特征在于,
2.如权利要求1所述的工业机器人落地式模块化组合教学工作站,其特征在于,
3.如权利要求1所述的工业机器人落地式模块化组合教学工作站,其特征在于,
4.如权利要求1所述的工业机器人落地式模块化组合教学工作站,其特征在于,
5.如权利要求1所述的工业机器人落地式模块化组合教学工作站,其特征在于,
6.如权利要求1所述的工业机器人落地式模块化组合教学工作站,其特征在于,
7.一种工业机器人落地式模块化组合教学系统,应用于权利要求1至权利要求6中任一项所述的工业机器人落地式模块化组合教学工作站,其特征在于,包括plc总控系统和mes系统,所述plc总控系统用于控制行走工业机器人平台、数控加工平台、立体仓储平台、输送线分拣平台、智能检测平台、翻转打磨平台、快换工具平台和总控平台之间的逻辑流程,所述mes系统用于进行订单管理、设备管理和信息显示。
技术总结本发明涉及机器人技术领域,具体涉及一种工业机器人落地式模块化组合教学工作站及系统,包括行走工业机器人平台、数控加工平台、立体仓储平台、输送线分拣平台、智能检测平台、翻转打磨平台、快换工具平台和总控平台,通过行走工业机器人平台来控制机器人的行走,通过数控加工平台进行物料加工,通过立体仓储平台进行物料存储,通过输送线分拣平台进行物料分拣,通过智能检测平台来进行物料的识别检测,通过翻转打磨平台来进行轮毂的翻转打磨,通过快换工具平台来快速进行工具的切换,通过总控平台来控制各平台,由于教学工作站可进行各个平台之间的随意组合,从而实现了由浅入深进阶式的教学实训,进而提高了教学工作站的适用范围。技术研发人员:李涛,黄学彬,宁柯,夏亮,郑登华,刘燕霖,周江平,罗超受保护的技术使用者:重庆智能机器人研究院技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240618/36227.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。