光伏清扫与飞行一体化机器人的制作方法
- 国知局
- 2024-07-17 13:48:50
本技术涉及光伏清扫设备,具体为光伏清扫与飞行一体化机器人。
背景技术:
1、太阳能光伏板由于其在使用过程中,需要在户外照射阳光,因此长时间使用后会其表面必然会被灰尘覆盖,当灰尘覆盖过厚时,会影响光伏板接收太阳光的性能,导致其能源转换率下降,无法正常使用,此时,需要对其表面灰尘等进行清洗。
2、但是,目前常用的方法是人工利用毛刷对其进行清理,清理过程中,使用人员需要对毛刷加以向下的压力,以确保能够完全将灰尘清洗掉,长时间使用下,使用人员的劳动强度较大,清洗效率低,清洗效果也无法保证,且部分光伏板布置位置较高,人工清洗不仅劳动强度大、费用高且存在一定的安全隐患,鉴于此,针对上述问题深入研究,遂有本案产生。
技术实现思路
1、针对现有技术的不足,本实用新型提供了光伏清扫与飞行一体化机器人,解决了现有技术中部分光伏板布置位置较高,人工清洗不仅劳动强度大、费用高且存在一定的安全隐患的问题。
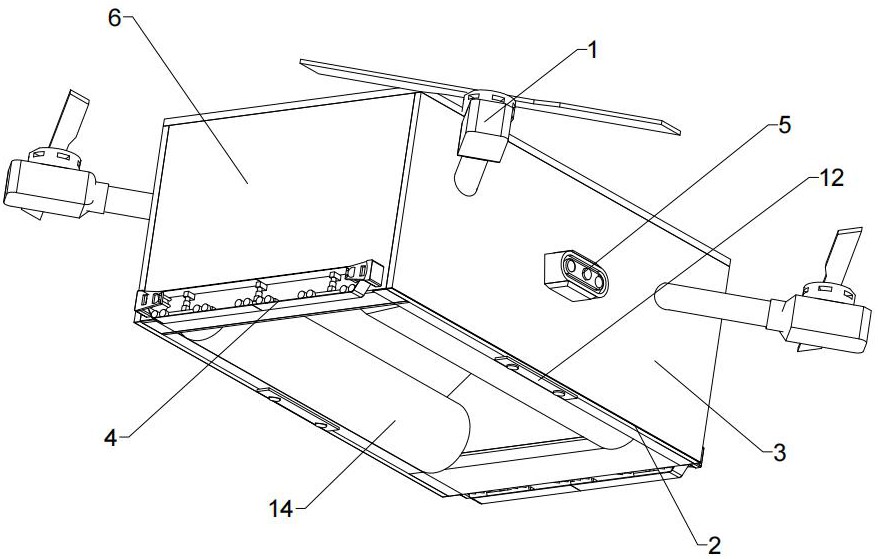
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种光伏清扫与飞行一体化机器人,包括安装在清扫部两侧的旋翼支臂以及螺旋桨叶,所述清扫部包括壳体、履带、滚动清扫组件以及负压集尘组件;
3、所述壳体侧壁与旋翼支臂装配固定,所述壳体前后两侧均设置有视频采集摄像头,所述壳体下端为开口结构且两侧分别设置有左侧板以及右侧板,所述右侧板内侧设置有电池盒、控制器、卫星导航模块以及数据传输模块,所述壳体下端沿设置有超声波模块,所述履带设置于壳体下端两侧位置上,所述滚动清扫组件对称设置于壳体内,所述负压集尘组件设置于壳体内且与壳体下端开口部分保持连通。
4、上述滚动清扫组件包括驱动件、滚刷以及传动皮带,所述驱动件对称设置于壳体内侧壁面上,所述滚刷转动设置于壳体内,所述滚刷的一端通过传动皮带与驱动件的输出端相连接。
5、上述负压集尘组件包括集尘挡板、集尘通道、排尘风扇以及通风网,所述集尘挡板沿倾斜方向对称成喇叭口状布置于壳体内且位于滚刷上方,所述集尘挡板两端分别设置有封堵板,所述集尘通道扣装于集尘挡板上部,所述排尘风扇固设于右侧板上且进风端与集尘通道相连通,所述通风网扣装于排尘风扇的进风端上。
6、上述右侧板上的排尘风扇下方开设有矩形缺口,所述矩形位置插装有集尘盒,所述集尘盒外部安装有把手。
7、上述集尘挡板上端的突出段伸入到集尘通道内。
8、本实用新型提供了光伏清扫与飞行一体化机器人。具备以下有益效果:
9、1、具有便捷移动的特性,无论高空、低空光伏板,可飞行到的地方均可以作业清扫;
10、2、整体结构具有扫尘、吸尘、集尘的特性,防止灰尘重新落到光伏板上,
11、清扫效率高;
12、3、自带卫星导航模块以及数据传输模块,可通过无线网络与地面控制设备连接,具备gps定位功能、数据传输功能,可实时与地面进行通讯传输,装置携带有视频采集摄像头与超声波模块,通过ai视觉系统与超声波进行边缘的识别定位,防止在航行作业过程中出现跌落的风险;
13、4、安全智能、高效快捷、减少人工,大大降低了光伏清扫的使用成本。
技术特征:1.光伏清扫与飞行一体化机器人,其特征在于,包括安装在清扫部(2)两侧的旋翼支臂(1)以及螺旋桨叶,所述清扫部(2)包括壳体(3)、履带(4)、滚动清扫组件以及负压集尘组件;
2.根据权利要求1所述的光伏清扫与飞行一体化机器人,其特征在于,所述滚动清扫组件包括驱动件(13)、滚刷(14)以及传动皮带(15),所述驱动件(13)对称设置于壳体(3)内侧壁面上,所述滚刷(14)转动设置于壳体(3)内,所述滚刷(14)的一端通过传动皮带(15)与驱动件(13)的输出端相连接。
3.根据权利要求2所述的光伏清扫与飞行一体化机器人,其特征在于,所述负压集尘组件包括集尘挡板(16)、集尘通道(17)、排尘风扇(18)以及通风网(19),所述集尘挡板(16)沿倾斜方向对称成喇叭口状布置于壳体(3)内且位于滚刷(14)上方,所述集尘挡板(16)两端分别设置有封堵板(20),所述集尘通道(17)扣装于集尘挡板(16)上部,所述排尘风扇(18)固设于右侧板(7)上且进风端与集尘通道(17)相连通,所述通风网(19)扣装于排尘风扇(18)的进风端上。
4.根据权利要求3所述的光伏清扫与飞行一体化机器人,其特征在于,所述右侧板(7)上的排尘风扇(18)下方开设有矩形缺口,所述矩形位置插装有集尘盒(21),所述集尘盒(21)外部安装有把手。
5.根据权利要求3所述的光伏清扫与飞行一体化机器人,其特征在于,所述集尘挡板(16)上端的突出段(1601)伸入到集尘通道(17)内。
技术总结本技术公开了一种光伏清扫与飞行一体化机器人,包括安装在清扫部两侧的旋翼支臂以及螺旋桨叶,所述清扫部包括壳体、履带、滚动清扫组件以及负压集尘组件,所述壳体两侧与旋翼支臂装配固定,所述壳体前后两侧均设置有视频采集摄像头,右侧板内侧设置有电池盒、控制器、卫星导航模块以及数据传输模块,本技术涉及光伏清扫设备技术领域,具有便捷移动的特性,无论高空、低空光伏板,可飞行到的地方均可以作业清扫;整体结构具有扫尘、吸尘、集尘的特性,防止灰尘重新落到光伏板上,清扫效率高;自带卫星导航模块以及数据传输模块,可通过无线网络与地面控制设备连接,具备GPS定位功能、数据传输功能,可实时与地面进行通讯传输。技术研发人员:汪楠楠,杨曦婷,王海强,韩启鹏,程鸿远,程光远受保护的技术使用者:岭域新能源(辽宁)有限公司技术研发日:20231102技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240711/111680.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表