一种可越障幕墙清洁机器人的制作方法
- 国知局
- 2024-07-17 13:57:40
本技术属于玻璃幕墙清洁机器人,具体涉及一种可越障幕墙清洁机器人。
背景技术:
1、玻璃幕墙,是指由支承结构体系可相对主体结构有一定位移能力、不分担主体结构所受作用的建筑外围护结构或装饰结构,墙体有单层和双层玻璃两种,玻璃幕墙是一种美观新颖的建筑墙体装饰方法,是现代主义高层建筑时代的显著特征。
2、玻璃幕墙往往设置于超高建筑,这对玻璃幕墙外表清洁提出了考验;传统的人工清洁由作业员挂安全绳在高空作业,工作强度大、危险,所以人工成本越来越高,这样的方式难以满足现代社会的发展需求;因此采用玻璃幕墙清洁机器人则可以代替人类在高空高效率低风险的作业,现有的玻璃幕墙清洁机器人设计,但仍存在种种缺陷,如:一些玻璃幕墙清洁机器人不存在越障功能,不具备越障能力,无法越过玻璃幕墙表面凸起的装饰条或者固定框架,只能清洁平整的玻璃墙面;一些具备越障能力的机器人越障速度慢,导致整体清洁效率降低。
3、因此本实用新型提供一种越障能力强、清洁效率高的可越障幕墙清洁机器人。
技术实现思路
1、针对上述背景技术所提出的问题,本实用新型的目的是:旨在提供一种可越障幕墙清洁机器人。
2、为实现上述技术目的,本实用新型采用的技术方案如下:
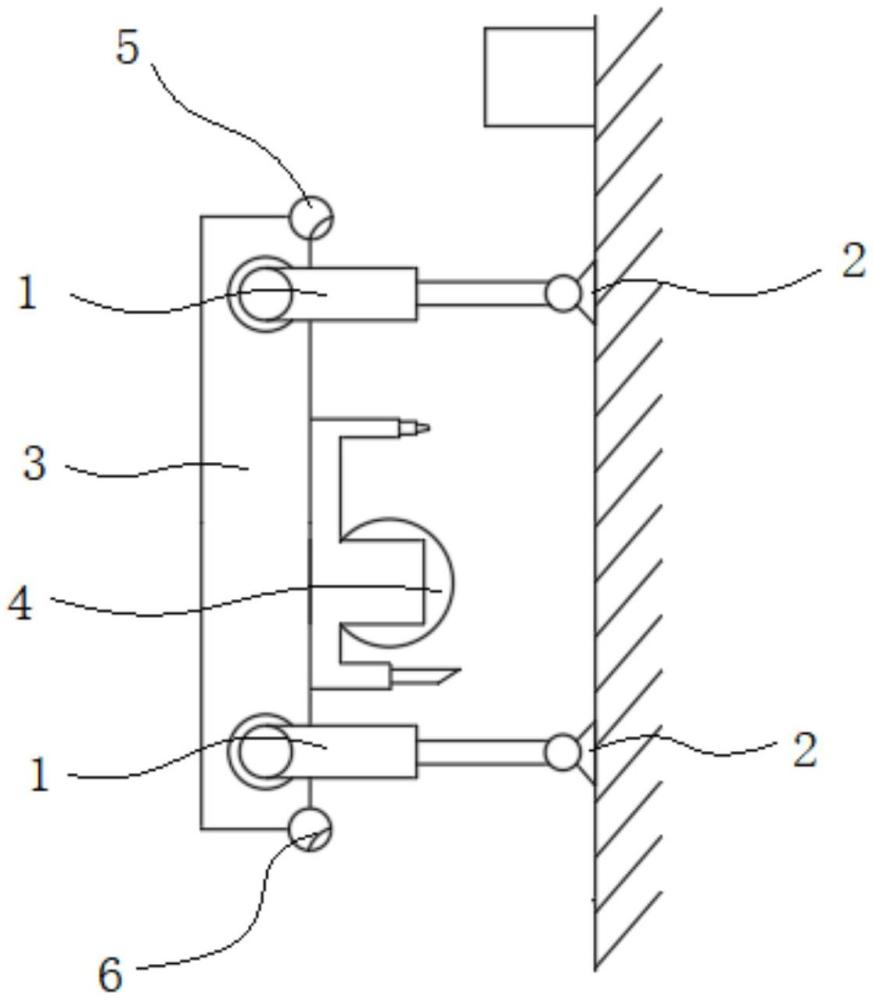
3、一种可越障幕墙清洁机器人,包括主体机构、清洁机构和感知机构,所述主体机构动力组件和吸附组件,所述动力组件包括真空泵和机器人平台,所述真空泵设置于所述机器人平台内部,所述吸附组件包括四条可伸缩的机械腿,所述机械腿包括机械大腿和机械小腿,所述机械大腿的一端与所述机器人平台相连接,另一端与所述机械小腿相连接,所述机械小腿底部连接有吸盘,每条所述机械腿底部均连接有吸盘,所述真空泵与吸盘通过管路和电磁阀连接,所述电磁阀用于控制所述真空泵与吸盘的连通或者断开,所述真空泵用于提供负压,当吸盘接触或者离开玻璃幕墙墙面时打开负压,所述机器人平台内部设有控制模块,所述真空泵与吸盘与控制模块连接,所述控制模块用于控制所述电磁阀开启或关闭,每条所述机械腿内分别设置有微型电机,所述微型电机用于将所述机械腿伸长或缩短,所述微型电机与所述控制模块连接;
4、所述清洁机构包括水路组件和刷洗组件,所述水路组件包括水箱、水泵、水管和分水器,所述水路组件设置于所述机器人平台内部,所述水箱与所述水泵通过所述水管连接,所述分水器设置于所述水管上;所述刷洗组件包括喷水帘、滚轴、滚刷和胶皮,所述滚刷与滚轴转动连接,所述滚轴与所述机器人平台底部固定连接,所述胶皮与所述机器人平台固定连接,所述喷水帘与所述机器人平台底部固定连接,所述喷水帘与所述水泵通过输水管路连接;
5、所述感知机构包括前端深度摄像头和后端深度摄像头,所述前端深度摄像头设置于所述机器人平台前端,所述后端深度摄像头设置于所述机器人平台后端,所述前端深度摄像头用于检测前方环境和障碍物高度,所述后端深度摄像头用于检测清洁之后的玻璃幕墙墙面,并判断玻璃幕墙的清洁程度,所述感知机构与所述控制模块连接,所述前端深度摄像头还用于采集玻璃幕墙图像信息,并标记出重度污染区域和轻度污染区域并传输至控制模块。
6、进一步限定,还包括安全组件,所述安全组件包括安全绳和张紧部件,所述张紧部件上设有滑轮,所述张紧部件与所述安全绳通过滑轮滑动连接。这样的结构设计,当清洁机器人出现异常从高空跌落时,张紧机构用于抱紧安全绳以较低速度自由坠落至地面,避免清洁机器人被损坏。
7、进一步限定,还包括清洁液储存盒,所述清洁液储存盒与所述水泵连接。这样的结构设计可便于清洁机器人在清水和混合有清洁液的水切换使用。
8、进一步限定,所述喷水帘端部设有若干个喷水孔,所述喷水孔上设置有喷水孔盖,所述喷水孔盖与所述控制模块连接,所述控制模块用于控制所述喷水孔盖开启或者关闭。
9、进一步限定,所述喷水孔盖的启闭分为四种状态,分别是全开启、开启二分之一、开启三分之一或者全关闭。这样的结构设计可提供多种状态,对重度污染和轻度污染可采用不同的喷水孔盖的状态,提高清洁效率。
10、进一步限定,所述喷水孔盖全开启时其喷水水流呈扩散状态,所述喷水孔盖开启二分之一时其喷水水流呈轻微扩散状态,所述喷水孔盖开启三分之一时其喷水水流呈集中状态,所述喷水孔盖全关闭时无水流流出。这样的结构设计可针对玻璃幕墙污染物的不同采用不同状态的喷水水流。
11、进一步限定,所述喷水水流呈扩散状态的覆盖面积为64平方厘米,所述喷水水流呈轻微扩散状态的覆盖面积为36平方厘米。所述喷水水流呈集中状态时的覆盖面积为9平方厘米。
12、本实用新型的有益效果:
13、本实用新型通过设置动力组件和吸附组件,动力组件由真空泵和机器人平台组成,四条可伸缩的机械腿分别连接有吸盘,真空泵与吸盘由控制模块控制,机器人平台前后端分别设有一深感摄像头,深感摄像头用于检测周围环境和障碍物高度,深度摄像头还能够获取图像中每个像素到摄像头的距离信息,从而建立起3d模型为清洁机器人越障提供充足的图像信息;
14、本实用新型的刷洗组件包括喷水帘,喷水帘上的设置的喷水孔盖由控制模块控制,控制模块根据深感摄像头传回图像信息,分析视觉区域的玻璃幕墙是重度污染或是轻度污染,以调整喷水孔盖的开启状态,清扫时机械腿缩短至最短,使清洁机器人呈趴下姿态清洁,然后机器人的喷水孔盖进行喷水,之后机器人上设置的滚刷和胶皮同时清洁,使清洁机器人能够精准的对污染物进行清洁,这样的设计提高了清洁机器人对玻璃幕墙的清洁效率,具有优秀的实用性及应用前景。
技术特征:1.一种可越障幕墙清洁机器人,其特征在于:包括主体机构、清洁机构和感知机构,所述主体机构包括动力组件和吸附组件,所述动力组件包括真空泵和机器人平台(3),所述真空泵设置于所述机器人平台(3)内部,所述吸附组件包括四条可伸缩的机械腿(1),所述机械腿包括机械大腿和机械小腿,所述机械大腿的一端与所述机器人平台(3)相连接,另一端与所述机械小腿相连接,所述机械小腿底部连接有吸盘(2),所述真空泵与吸盘(2)通过管路和电磁阀连接,所述电磁阀用于控制所述真空泵与吸盘(2)的连通或者断开,所述真空泵用于提供负压,当吸盘(2)接触或者离开玻璃幕墙墙面时打开负压,所述机器人平台(3)内部设有控制模块,所述真空泵与吸盘(2)与控制模块连接,所述控制模块用于控制所述电磁阀开启或关闭,每条所述机械腿(1)内分别设置有微型电机,所述微型电机用于将所述机械腿(1)伸长或缩短,所述微型电机与所述控制模块连接;
2.根据权利要求1所述的一种可越障幕墙清洁机器人,其特征在于:还包括安全组件,所述安全组件包括安全绳和张紧部件,所述张紧部件上设有滑轮,所述张紧部件与所述安全绳通过滑轮滑动连接。
3.根据权利要求1所述的一种可越障幕墙清洁机器人,其特征在于:还包括清洁液储存盒,所述清洁液储存盒与所述水泵连接。
4.根据权利要求1所述的一种可越障幕墙清洁机器人,其特征在于:所述喷水帘端部设有若干个喷水孔,所述喷水孔上设置有喷水孔盖,所述喷水孔盖与所述控制模块连接,所述控制模块用于控制所述喷水孔盖开启或者关闭。
5.根据权利要求4所述的一种可越障幕墙清洁机器人,其特征在于:所述喷水孔盖的启闭分为四种状态,分别是全开启、开启二分之一、开启三分之一或者全关闭。
6.根据权利要求5所述的一种可越障幕墙清洁机器人,其特征在于:所述喷水孔盖全开启时其喷水水流呈扩散状态,所述喷水孔盖开启二分之一时其喷水水流呈轻微扩散状态,所述喷水孔盖开启三分之一时其喷水水流呈集中状态,所述喷水孔盖全关闭时无水流流出。
7.根据权利要求6所述的一种可越障幕墙清洁机器人,其特征在于:所述喷水水流呈扩散状态的覆盖面积为64平方厘米,所述喷水水流呈轻微扩散状态的覆盖面积为36平方厘米,所述喷水水流呈集中状态时的覆盖面积为9平方厘米。
技术总结本技术公开了一种可越障幕墙清洁机器人,包括主体机构、清洁机构和感知机构,所述主体机构动力组件和吸附组件,所述动力组件包括真空泵和机器人平台,所述真空泵设置于所述机器人平台内部,所述吸附组件包括四条可伸缩的机械腿,每条所述机械腿底部均连接有吸盘,所述真空泵与吸盘通过管路和电磁阀连接,所述电磁阀用于控制所述真空泵与吸盘的连通或者断开,所述真空泵用于提供负压,当吸盘接触或者离开玻璃幕墙墙面时打开负压,所述机器人平台内部设有控制模块,所述真空泵与吸盘与控制模块连接,所述控制模块用于控制所述电磁阀开启或关闭,每条所述机械腿内分别设置有微型电机,所述微型电机用于将所述机械腿伸长或缩短。技术研发人员:杨军令,张勇,朱志勇受保护的技术使用者:上海妙尔法人工智能科技有限公司技术研发日:20231205技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240711/112524.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
双槽双轮洗碗机的制作方法
下一篇
返回列表