一种采用无人机巡检输电线路绝缘子缺陷的检测系统的制作方法
- 国知局
- 2024-07-17 12:39:44
本技术涉及一种系统,尤其是涉及一种巡检输电线路绝缘子缺陷的无人机系统。
背景技术:
1、绝缘子是在输电线路中起着机械支撑和电气绝缘作用的部件,用量极其庞大。由于绝缘子终年暴露在户外,易遭受自然天气灾害、机械负荷人为因素不同程度的损害,成为故障多发元件之一。高压输电线路发生绝缘子故障后,如破损、污秽和闪络等容易引起输电线路大范围停电;据统计由绝缘子故障引起的停运时间占电网总故障时间50% 以上,严重威胁着电网安全运行及供电可靠性。我国电网输电线路大多分布在崇山峻岭之间,常常跨越交通死区,这将带来巡检难度大、周期时间长等问题,并存在一定的人员安全隐患,难以及时对绝缘子维护和抢修,易造成长时间停电事故,导致严重经济损失。
2、现有技术,如中国专利申请,公开号:cn101769971a,公开一种绝缘子检测机器人,包括第一履带轮、箱体、第二履带轮、变距伸缩机构及探头驱动机构,箱体上安装有变距伸缩机构,第一、二履带轮位于箱体的两侧、分别与变距伸缩机构相铰接,第一、二履带轮上分别连接有第一、二行程传感器;箱体的下方设有探头驱动机构。然而,该现有技术存在如下缺陷:该机器人不具备跨越杆塔或线路项间距行走的功能,即每次只能巡检单导线单杆塔连接处的绝缘子串,若想巡查不同导线或不同杆塔连接处的绝缘子串,仍需人工进行位置移动。cn101381002a公开了飞行器控制与图像传输技术领域中的一种用于检测输电线路绝缘子的飞行机器人,其技术方案是,用于检测输电线路绝缘子的飞行机器人由三轴飞行器或者四轴飞行器、飞行控制系统和目标识别系统构成;三轴飞行器的动力部分由3对螺旋桨、3对同轴电机和3个支撑臂组成;四轴飞行器的动力部分由4个直驱的无刷马达和4个螺旋桨构成;飞行控制系统由机载自主控制系统和地面站控制系统组成;目标识别系统由机载任务载荷和地面图像处理系统组成。该现有技术仅采用视觉方式从绝缘子外观判断其是否正常,该方法检测正确率低,无法检测到外观无明显变化的缺陷。
技术实现思路
1、为了解决现有技术中存在的缺陷,本实用新型公开一种采用无人机巡检输电线路绝缘子缺陷的检测系统,其技术方案如下:
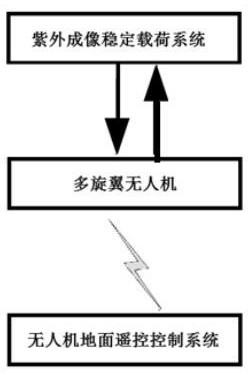
2、一种采用无人机巡检输电线路绝缘子缺陷的检测系统,包括多旋翼无人机、紫外成像稳定载荷系统、无人机地面遥控控制系统,所述多旋翼无人机搭载紫外成像稳定载荷系统实现与无人机地面遥控控制系统数据传输,其特征为:
3、所述多旋翼无人机包括飞行控制系统机载控制计算机,与其相连的包括卫星定位模块、数字罗盘、三轴陀螺仪、三轴加速度计、舵机控制器、气压高度计、转速测量传感器、pcm 遥控接收机、机载无线通信单元;
4、所述紫外成像稳定载荷系统包括采用横滚-俯仰两轴摇臂式框架结构的两轴增稳云台和双通道紫外摄像仪,其中,外框架为横滚框架,内框架为俯仰框架,陀螺模块与所述双通道紫外摄像仪安装在俯仰框架上;安装在增稳云台俯仰轴上的陀螺模块感应无人机的摇摆、振动,通过陀螺稳定回路确保设置在摇臂上的双通道紫外摄像仪瞄准线的稳定;所述横滚轴一端与俯仰轴连接,另一端与基座连接;所述基座上设置包含驱动器的伺服控制板,该伺服控制板与多旋翼无人机中的飞行控制系统机载控制计算机实现数据通信;
5、所述无人机地面遥控控制系统包括地面站无线通信单元以及液晶触摸屏,所述液晶触摸屏显示通过地面站无线通信单元接收的多旋翼无人机下传的数据,并将数据显示在屏幕上,同时将所述数据通过sd 卡接口将数据导出;所述液晶触摸屏通过地面站无线通信单元发出控制指令给所述飞行控制系统机载控制计算机。
6、优选为:所述卫星定位模块和无人机气压高度计采集无人机在检测时的gps 值和高度值与所述飞行控制系统机载控制计算机中dsp处理单元输入的控制命令相匹配后,通过机载无线通信单元将数据传输给无人机地面遥控控制系统。
7、优选为:所述增稳云台上的伺服控制板与飞行控制系统机载控制计算机通过rs422总线实现增稳云台控制指令和增稳云台状态反馈的通信;所述陀螺模块采用rs485通信,通过采集陀螺信息和编码器信号,控制电机完成位置闭环增稳控制。
8、优选为:所述双通道紫外摄像仪将采集的绝缘子图像信号直接通过并口数据总线与飞行控制系统机载控制计算机中的dsp 处理单元通信。
9、优选为:所述多旋翼无人机采用双路的光电倍增管对紫外光信号的采集的双目探测器。
10、优选为:所述多旋翼无人机为四旋翼无人机。
11、有益效果
12、1.采用无人机双目探测器巡检,保证每个绝缘子探测点被采集两次,增加准确度;
13、2.利用双通道紫外摄像仪采集绝缘子的电晕放电现象,为电气设备的状态检测提供依据;
14、3.采用横滚-俯仰两轴摇臂式框架结构的两轴增稳云台,增加了紫外摄像仪工作的稳定性。
技术特征:1.一种采用无人机巡检输电线路绝缘子缺陷的检测系统,包括多旋翼无人机、紫外成像稳定载荷系统、无人机地面遥控控制系统,所述多旋翼无人机搭载紫外成像稳定载荷系统实现与无人机地面遥控控制系统数据传输,其特征为:
2.根据权利要求1所述的采用无人机巡检输电线路绝缘子缺陷的检测系统,其特征为:所述卫星定位模块和无人机气压高度计采集无人机在检测时的gps 值和高度值与所述飞行控制系统机载控制计算机中dsp处理单元输入的控制命令相匹配后,通过机载无线通信单元将数据传输给无人机地面遥控控制系统。
3.根据权利要求1所述的采用无人机巡检输电线路绝缘子缺陷的检测系统,其特征为:所述增稳云台上的伺服控制板与飞行控制系统机载控制计算机通过rs422总线实现增稳云台控制指令和增稳云台状态反馈的通信;所述陀螺模块采用rs485通信,通过采集陀螺信息和编码器信号,控制电机完成位置闭环增稳控制。
4.根据权利要求1所述的采用无人机巡检输电线路绝缘子缺陷的检测系统,其特征为:所述双通道紫外摄像仪将采集的绝缘子图像信号直接通过并口数据总线与飞行控制系统机载控制计算机中的dsp 处理单元通信。
5.根据权利要求1所述的采用无人机巡检输电线路绝缘子缺陷的检测系统,其特征为:所述多旋翼无人机采用双路的光电倍增管对紫外光信号的采集的双目探测器。
6.根据权利要求1所述的采用无人机巡检输电线路绝缘子缺陷的检测系统,其特征为:所述多旋翼无人机为四旋翼无人机。
技术总结一种采用无人机巡检输电线路绝缘子缺陷的检测系统,包括多旋翼无人机、包括采用横滚‑俯仰两轴摇臂式框架结构的两轴增稳云台和双通道紫外摄像仪的紫外成像稳定载荷系统、包括地面站无线通信单元以及液晶触摸屏的无人机地面遥控控制系统,所述多旋翼无人机搭载紫外成像稳定载荷系统实现与无人机地面遥控控制系统数据传输。本技术采用无人机双目探测器巡检,保证每个绝缘子探测点被采集两次,增加准确度;利用双通道紫外摄像仪采集绝缘子的电晕放电现象,为电气设备的状态检测提供依据;采用横滚‑俯仰两轴摇臂式框架结构的两轴增稳云台,增加了紫外摄像仪工作的稳定性。技术研发人员:刘会斌,张欣伟,李博,尚鑫,冯振华,安义岩,祝永坤,党乐,田立山,王胜辉,李仲炜,王秀茹,买佳敏受保护的技术使用者:国网内蒙古东部电力有限公司电力科学研究院技术研发日:20231102技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240716/105524.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表