一种原子干涉惯性角速度与加速度自主溯源装置的制作方法
- 国知局
- 2024-07-17 12:50:56
本技术涉及原子频率溯源,特别涉及一种原子干涉惯性角速度与加速度自主溯源装置。
背景技术:
1、原子干涉惯性角速度与加速度自主溯源装置是量子惯性传感器与惯性导航系统重要组成部分,为它们提供高精度角速度和加速度参考信息,它可以校准各类陀螺仪、惯性导航系统等惯性测量仪器,并为量子惯性传感器提供原位溯源。原子干涉惯性角速度与加速度自主溯源装置相比传统的溯源装置,不仅仅具有超高灵敏角速度与加速度,而且具有高带宽,并能向时间常数溯源。
技术实现思路
1、本实用新型要解决的技术问题是:克服现有技术的不足,提出一种原子干涉惯性角速度与加速度自主溯源装置,实现了高灵敏角速度与加速度基准测量、惯性导航参数校准以及自主溯源。
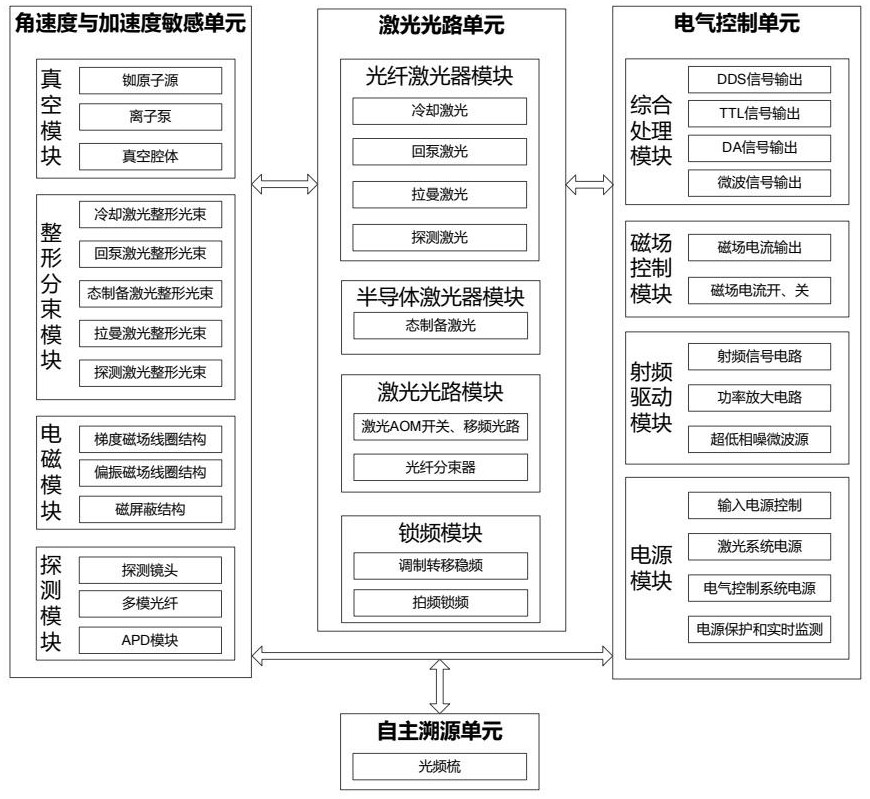
2、针对上述技术问题,本实用新型采用的技术方案为:一种原子干涉惯性角速度与加速度自主溯源装置,包括角速度与加速度敏感单元、激光光路单元、电气控制单元和自主溯源单元;其中角速度与加速度敏感单元内包括真空模块、整形分束模块、电磁模块、探测模块;激光光路单元内包括光纤激光器模块、半导体激光器模块、激光光路模块和锁频模块,电气控制单元内包括综合处理模块、磁场控制模块、射频驱动模块和电源模块,自主溯源单元内包括光频梳,角速度与加速度敏感单元用于感知角速度与加速度信息,激光光路单元用于激光光源产生,电气控制单元用于激光频率、开关时间控制、信号采集和解算,自助溯源单元用于实现光频率向微波频率溯源。
3、进一步地,所述角速度与加速度敏感单元中的真空模块包括铷原子源、离子泵和真空腔体;整形分束模块包括冷却激光整形分束、回泵激光整形分束、态制备激光整形分束、拉曼激光整形分束和探测激光整形分束五个子模块;电磁模块包括梯度磁场线圈结构、偏振磁场线圈结构和磁屏蔽结构;探测模块包括探测镜头、多模光纤和apd模块。
4、冷原子源的制备方案为通过二维磁光阱与三维光学粘胶的方式,二维磁光阱缩写为2d+mot,三维光学粘胶缩写为3d om,采用多级二维冷却组合的方式增加冷却区面积,两个方向的冷却光分别通过1/2波片和偏振分光棱镜(pbs)分成三束,然后利用1/4波片将线偏振调整为圆偏振光,当冷却光通过2d+mot后利用反射镜和1/4波片实现冷却光的对射和偏振改变,推送光从中间对准原子束入射,光斑面积覆盖原子束的横截面;2d+mot在工作过程中需要产生一个二维的梯度磁场,使得原子发生塞满能级分裂完成原子的二维囚禁冷却,通常情况下采用两对矩形线圈产生一个只有径向梯度的磁场,轴线的磁感应强度大小的计算公式为:
5、
6、式中,b代表磁场强度,代表圈数,代表电流,代表真空磁导率,代表两个线圈的距离,代表同一个线圈的两条长边距离,代表线圈半径。
7、三维光学粘胶由三对正交传播的圆偏振激光组成,六束激光交于一点,且交点在二维磁光阱的轴线上,六束冷却激光和重泵激光的合束光通过真空窗口的光纤耦合器入射,进入真空部分与原子作用,光斑直径达到20mm,功率达到15mw,接近饱和光强。调节冷却激光的失谐,功率,以及磁场线圈电流的大小,用ccd监测mot中心成像,在各个参数配置合理的情况下,可以在mot中心实现囚禁冷原子束,利用时序控制,关断冷却激光,关断磁场,改变对射冷却光的频差,即可实现冷原子源的运动方向,为了实现高效率、低原子数目损失的原子初态制备,采用基于激光抽运的技术方案,将mf≠0态的原子抽运到mf=0态上。态制备激光为87rb原子d2线f=2→f’=2的光,被激发的原子会通过自发辐射过程回到f=1态,回到f=1态的原子与一束f=1→f’=0的光作用,态制备作用时需存在一个与态制备光波矢方向平行的偏置磁场,用以定义量子化轴,使得原子能级发生塞曼分裂;依据跃迁定则,该激光可以激发(f=1,mf=1→f’=0,mf’=0)、(f=1,mf =-1→f’=0,mf’=0)的跃迁过程,处于(f=1,mf =0)态的原子不与态制备光发生作用,因此,最终原子都会被抽运到f=1,mf=0态,也就是暗态,这种态制备方式快速高效,而且不损失原子数目,有利于下一次原子束的快速制备。
8、进一步地,所述的激光光路单元中的光纤激光器模块包括冷却激光、回泵激光、拉曼激光和探测激光四个子模块;所述的半导体激光器模块包括态制备激光子模块;所述的激光光路模块包括激光aom开关、移频光路和光纤分束器子模块;所述的锁频模块包括调制转移稳频和拍频锁频子模块;所述的激光光路单元用于提供不同的激光光源,激光光路单元与电气控制单元连接,共同实现激光控制。
9、进一步地,所述的电气控制单元是基于fpga与dsp设计的控制系统,用于激光频率与开关时间的控制以及信号采集和解算;所述的电气控制单元中的综合处理模块包括dds信号输出、ttl信号输出、da信号输出和微波信号输出四个子模块;所述的磁场控制模块包括磁场电流输出和磁场电流开、关子模块;所述的射频驱动模块包括射频信号电路、功率放大电路和超低相噪微波源三个子模块;所述的电源模块包括输出电源控制、激光系统电源、电气控制系统电源和电源保护和实时监测子模块。
10、进一步地,所述的自主溯源单元用于校准惯性传感器(陀螺仪与加速度计)。
11、使用时,冷原子干涉陀螺仪中三束拉曼脉冲充当激光陀螺仪中的分束镜、反射镜、合束镜,第一束拉曼脉冲使抛射的冷原子束形成了两条不同的物质波传播路径,第二束实现两个路径上冷原子束的偏转,第三束实现两个路径上的冷原子束干涉,形成闭合的sagnac干涉环路,当存在角运动与线运动时,由于两条路径上的原子束与激光作用时感受到的激光频率不一样,激光传递给原子的相位也不同,最终导致原子物质波干涉后,原子的内态分布发生改变,通过探测原子内态分布计算跃迁概率推出原子物质波干涉相位移动,进而推算出角速度与加速度信息。
12、左右两束冷原子的物理过程同步发生,物理配置均相同,在此简述一束冷原子的物理过程,每个物理过程均由角速度与加速度敏感单元、激光光路单元和电气控制单元同步联动实现;其中,角速度与加速度敏感单元提供铷原子源;激光单元提供激光光源,角速度与加速度敏感单元确定激光空间排布、电气控制单元控制激光频率和开关时间;角速度与加速度敏感单元提供磁场线圈排布、电控单元提供线圈电流控制;电气控制单元完成信号采集和解算;自主溯源单元完成激光频率向微波频率溯源,并实现向时间常数溯源。
13、本实用新型与现有技术相比的有益效果为:
14、(1)本实用新型通过采用二维磁光阱(2d+mot)与三维光学粘胶(3d om)的冷原子源制备技术方案,可产生定向运动的连续冷原子源,双环路三脉冲原子干涉陀螺的整个物理过程包括左右原子束同步冷却、同步对射、同步molasses冷却、同步态制备、同步干涉和同步探测,最终通过探测后原子荧光信号比值计算相位。
15、(2)本实用新型中针对惯性角速度与加速度自主溯源需求,设计了自主溯源单元,通过光频梳实现激光频率向微波频率、时间常数的溯源,缩短惯性角速度与加速度的溯源链路,提高惯性导航参数长期稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240716/106636.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表