一种翻车机卸煤作业用摘钩机构的制作方法
- 国知局
- 2024-08-01 08:32:20
本技术属于火电厂翻车机作业机器人领域,具体地说是一种翻车机卸煤作业用摘钩机构。
背景技术:
1、现如今在我国陆上燃煤电厂大部分采用火车运输煤原料。进入电厂后基本上采用翻车机来进行接卸煤炭。在翻车机系统中有多种布置和作业工艺,其中以折返式翻车机作业最为常用。我国多数陆上燃煤电厂采用的就是此模式的翻车机作业流程。翻车机在卸载火车车厢货物前,需要把整列火车按照翻车机卸载的能力进行车厢分组。然后再由重车调车机将分组好的车厢运输到翻车机平台上,翻车机旋转翻卸车厢。在此过程中将整列火车车厢进行分组时火车车厢之间连接的车钩基本全部由人员穿插在折返式翻车机作业现场进行人工摘钩。
2、另外实际摘钩现场车厢为混编运输,各类车厢的车钩摘钩位置不同,摘钩方式不同,因为车厢长时间使用,车钩常有发生变形的情况,即便同型号的车钩其车钩位置也存在误差,能达到几十毫米以及几百毫米。因此按照特定轨迹进行作业,很大程度上会出现摘钩失败。
技术实现思路
1、针对目前摘钩作业基本为人工操作,需要能够自动进行摘钩且能够兼容多类车厢车钩使用的自动摘钩机构的问题,本实用新型的目的在于提供一种翻车机卸煤作业用摘钩机构。
2、本实用新型的目的是通过以下技术方案来实现的:
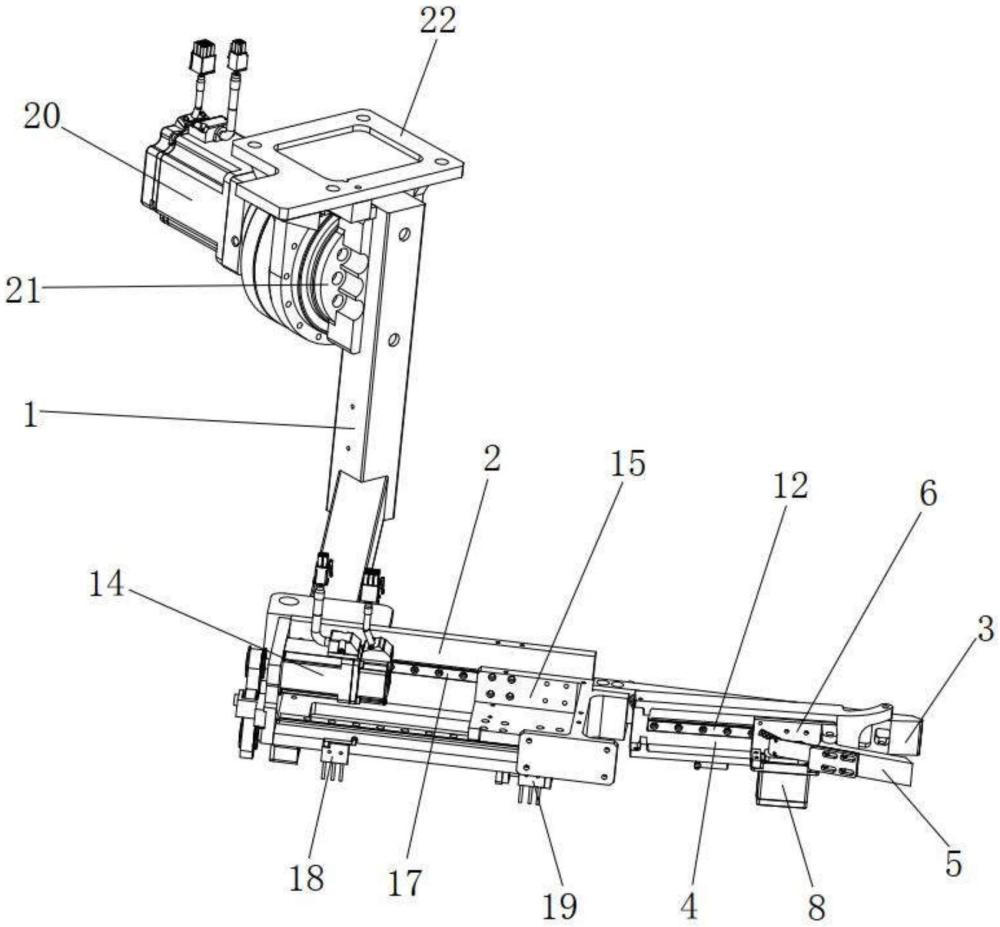
3、一种翻车机卸煤作业用摘钩机构,包括翻转驱动组件、翻转连接臂、主机架、进给组件及夹爪组件;
4、所述翻转驱动组件的驱动端与所述翻转连接臂的一端连接、并驱动所述翻转连接臂翻转,所述翻转连接臂的另一端与所述主机架连接,所述进给组件安装于所述主机架上,所述进给组件的驱动端驱动所述夹爪组件向车厢靠近或远离。
5、所述夹爪组件包括插入主杆、钩柄夹爪座、钩柄夹爪手指、夹爪手指连接座及手指驱动结构,所述插入主杆分别与所述进给组件的驱动端及所述钩柄夹爪座连接,所述夹爪手指连接座设置于所述钩柄夹爪座上,所述钩柄夹爪手指与所述夹爪手指连接座转动连接,所述钩柄夹爪手指靠近车厢的一端与所述钩柄夹爪座靠近车厢的一端形成用于夹持车钩钩柄的开口;所述手指驱动结构驱动所述钩柄夹爪手指动作、使所述钩柄夹爪手指靠近车厢的一端与所述钩柄夹爪座靠近车厢的一端夹住车钩钩柄。
6、所述钩柄夹爪座靠近车厢的一端与所述插入主杆靠近车厢的一端铰接,所述钩柄夹爪座远离车厢的一端与所述插入主杆远离车厢的一端之间连接有夹爪座复位弹簧。
7、所述手指驱动结构包括手指驱动舵机、手指驱动臂、手指驱动弹片及手指复位弹簧,所述手指驱动弹片与所述钩柄夹爪手指远离车厢的一端连接,所述手指复位弹簧连接于所述手指驱动弹片与所述夹爪手指连接座之间,所述手指驱动舵机安装于所述夹爪手指连接座上,所述手指驱动臂的一端安装于所述手指驱动舵机的驱动端上;需要控制所述钩柄夹爪手指夹住车钩钩柄时,所述手指驱动舵机的驱动端驱动手指驱动臂的另一端抵住所述手指驱动弹片、进而带动所述钩柄夹爪手指相对于所述夹爪手指连接座转动并夹住车钩钩柄。
8、所述钩柄夹爪座上设有导轨a,所述夹爪手指连接座上设有与所述导轨a滑动连接的滑块a,所述钩柄夹爪座上还设有夹爪后移到位检测传感器。
9、所述进给组件包括进给驱动件、进给驱动座及进给丝杠,所述进给驱动件及进给丝杠分别固定安装于所述主机架上,所述进给驱动件的驱动端通过传动结构与所述进给丝杠连接、并驱动所述进给丝杠转动,所述进给驱动座上设有与所述进给丝杠螺纹连接的进给丝杠螺母,所述进给驱动座作为所述进给组件的驱动端与所述夹爪组件连接。
10、所述主机架上设有导轨b,所述进给驱动座上还设有与所述导轨b滑动连接的滑块b。
11、所述主机架上设有原点位检测传感器及极限位检测传感器,所述原点位检测传感器位于所述主机架上远离车厢的一侧,所述极限位检测传感器位于所述主机架上靠近车厢的一侧。
12、所述翻转驱动组件包括翻转驱动电机、减速机及减速机安装架,所述减速机安装于所述减速机安装架上,所述翻转驱动电机的外壳与所述减速机的外壳连接,所述翻转驱动电机的驱动端与所述减速机的输入端连接,所述减速机的输出端作为所述翻转驱动组件的驱动端与所述翻转连接臂的一端连接,所述减速机安装架与外接移动模组连接。
13、所述翻转连接臂包括连接在一起的竖直摆动段及斜向水平段,所述竖直摆动段的一端与所述翻转驱动组件的驱动端连接,所述竖直摆动段的另一端与所述斜向水平段的一端连接,所述斜向水平段的另一端与所述主机架连接;
14、初始状态时,所述斜向水平段在水平面上的投影线与所述翻转驱动组件的驱动端的轴向中心线在水平面上的投影相交呈固定夹角。
15、本实用新型的优点与积极效果为:
16、本实用新型通过翻转驱动组件、翻转连接臂、主机架、进给组件及夹爪组件的配合设置,可准确有效实现自动摘钩作业,节省人力,且能够兼容多类车厢车钩使用,适用性强,还可减少提钩机构的使用,实现了整体设备的轻量化,通过减少了整体设备的体积和重量,在原有实现速度不变的情况下,设备选择的参数可以选择更小,可以减小成本。
技术特征:1.一种翻车机卸煤作业用摘钩机构,其特征在于:包括翻转驱动组件、翻转连接臂(1)、主机架(2)、进给组件及夹爪组件;
2.根据权利要求1所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述夹爪组件包括插入主杆(3)、钩柄夹爪座(4)、钩柄夹爪手指(5)、夹爪手指连接座(6)及手指驱动结构,所述插入主杆(3)分别与所述进给组件的驱动端及所述钩柄夹爪座(4)连接,所述夹爪手指连接座(6)设置于所述钩柄夹爪座(4)上,所述钩柄夹爪手指(5)与所述夹爪手指连接座(6)转动连接,所述钩柄夹爪手指(5)靠近车厢的一端与所述钩柄夹爪座(4)靠近车厢的一端形成用于夹持车钩钩柄的开口;所述手指驱动结构驱动所述钩柄夹爪手指(5)动作、使所述钩柄夹爪手指(5)靠近车厢的一端与所述钩柄夹爪座(4)靠近车厢的一端夹住车钩钩柄。
3.根据权利要求2所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述钩柄夹爪座(4)靠近车厢的一端与所述插入主杆(3)靠近车厢的一端铰接,所述钩柄夹爪座(4)远离车厢的一端与所述插入主杆(3)远离车厢的一端之间连接有夹爪座复位弹簧(7)。
4.根据权利要求2所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述手指驱动结构包括手指驱动舵机(8)、手指驱动臂(9)、手指驱动弹片(10)及手指复位弹簧(11),所述手指驱动弹片(10)与所述钩柄夹爪手指(5)远离车厢的一端连接,所述手指复位弹簧(11)连接于所述手指驱动弹片(10)与所述夹爪手指连接座(6)之间,所述手指驱动舵机(8)安装于所述夹爪手指连接座(6)上,所述手指驱动臂(9)的一端安装于所述手指驱动舵机(8)的驱动端上;需要控制所述钩柄夹爪手指(5)夹住车钩钩柄时,所述手指驱动舵机(8)的驱动端驱动手指驱动臂(9)的另一端抵住所述手指驱动弹片(10)、进而带动所述钩柄夹爪手指(5)相对于所述夹爪手指连接座(6)转动并夹住车钩钩柄。
5.根据权利要求3所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述钩柄夹爪座(4)上设有导轨a(12),所述夹爪手指连接座(6)上设有与所述导轨a(12)滑动连接的滑块a,所述钩柄夹爪座(4)上还设有夹爪后移到位检测传感器(13)。
6.根据权利要求1所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述进给组件包括进给驱动件(14)、进给驱动座(15)及进给丝杠(16),所述进给驱动件(14)及进给丝杠(16)分别固定安装于所述主机架(2)上,所述进给驱动件(14)的驱动端通过传动结构与所述进给丝杠(16)连接、并驱动所述进给丝杠(16)转动,所述进给驱动座(15)上设有与所述进给丝杠(16)螺纹连接的进给丝杠螺母,所述进给驱动座(15)作为所述进给组件的驱动端与所述夹爪组件连接。
7.根据权利要求6所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述主机架(2)上设有导轨b(17),所述进给驱动座(15)上还设有与所述导轨b(17)滑动连接的滑块b。
8.根据权利要求6所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述主机架(2)上设有原点位检测传感器(18)及极限位检测传感器(19),所述原点位检测传感器(18)位于所述主机架(2)上远离车厢的一侧,所述极限位检测传感器(19)位于所述主机架(2)上靠近车厢的一侧。
9.根据权利要求1所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述翻转驱动组件包括翻转驱动电机(20)、减速机(21)及减速机安装架(22),所述减速机(21)安装于所述减速机安装架(22)上,所述翻转驱动电机(20)的外壳与所述减速机(21)的外壳连接,所述翻转驱动电机(20)的驱动端与所述减速机(21)的输入端连接,所述减速机(21)的输出端作为所述翻转驱动组件的驱动端与所述翻转连接臂(1)的一端连接,所述减速机安装架(22)与外接移动模组连接。
10.根据权利要求1所述的一种翻车机卸煤作业用摘钩机构,其特征在于:所述翻转连接臂(1)包括连接在一起的竖直摆动段(101)及斜向水平段(102),所述竖直摆动段(101)的一端与所述翻转驱动组件的驱动端连接,所述竖直摆动段(101)的另一端与所述斜向水平段(102)的一端连接,所述斜向水平段(102)的另一端与所述主机架(2)连接;
技术总结本技术属于火电厂翻车机作业机器人领域,具体地说是一种翻车机卸煤作业用摘钩机构,包括翻转驱动组件、翻转连接臂、主机架、进给组件及夹爪组件;翻转驱动组件的驱动端与翻转连接臂的一端连接、并驱动翻转连接臂翻转,翻转连接臂的另一端与主机架连接,进给组件安装于主机架上,进给组件的驱动端驱动夹爪组件向车厢靠近或远离。本技术通过翻转驱动组件、翻转连接臂、主机架、进给组件及夹爪组件的配合设置,可准确实现自动摘钩作业,节省人力,且能够兼容多类车厢车钩使用,还可减少提钩机构的使用,实现整体设备的轻量化,通过减少整体设备的体积和重量,在原有实现速度不变的情况下,设备选择的参数可以选择更小,可以减小成本。技术研发人员:孙明,汤培英,张飞,王美战,陈剑华受保护的技术使用者:陕西商洛发电有限公司技术研发日:20230807技术公布日:2024/2/1本文地址:https://www.jishuxx.com/zhuanli/20240718/232195.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表