一种低速轻型轨道车的低能耗岔道自动控制装置的制作方法
- 国知局
- 2024-08-01 08:35:38
本技术涉及自动控制装置,尤其涉及一种低速轻型轨道车的低能耗岔道自动控制装置。
背景技术:
1、轨道车辆进入岔道,目前的普遍技术是机械自动化扳道岔。对于速度低、重量轻的轨道车辆,现行的技术有一个重要缺陷:轨道游乐低速轻型小车、轨道上做试验的低速轻型玩具车或其它类似车辆,它们既需要在闭环的轨道上按圈数或者里程计费或计时,又需要多个独自的个体车辆独自运行,这就出现了有些车辆已经跑足了圈数或时间、有些车辆还在完成任务的过程中的问题,对于已经完成任务的车辆需要有道岔让其离开计圈、计时的轨道,否则,要么成为未完成任务的车辆的障碍,要么就白白浪费能耗,对于试验车辆还会导致基础数据失实。
2、使用扳道岔的现有技术,一是体量大,二是能耗高,三是控制环节多且精密度要求高,四是成本高使得应用“不合算”,因此,现在的多个单体在同一轨道上行驶的车辆(比如游乐小火车、游乐动物车)即使只有一个人一辆车运行,也是整队车全部运行,浪费能源、游客体验感差,因此需要一种低速轻型轨道车的低能耗岔道自动控制装置来满足人们的需求。
技术实现思路
1、本实用新型的目的在于提供一种低速轻型轨道车的低能耗岔道自动控制装置,以解决上述背景技术中提出的现有发控制装置上不能实现低能耗、低成本实现计圈(计时)型轨道低速轻型车辆的道岔自动控制的问题。
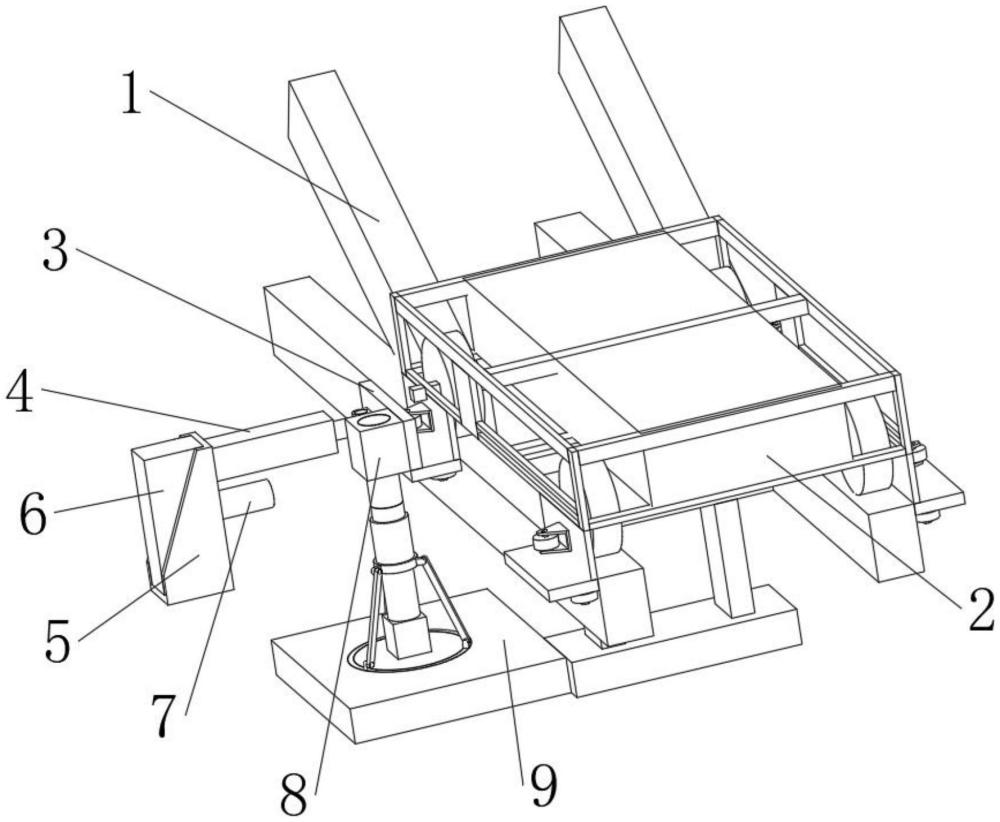
2、为实现上述目的,本实用新型提供如下技术方案:一种低速轻型轨道车的低能耗岔道自动控制装置,包括轨道本体,所述轨道本体上设有车辆,所述车辆上安装有安装座,安装座上安装有伺服电机,伺服电机上安装有支撑座,支撑座上安装有电动伸缩杆,电动伸缩杆上安装有传动轴,传动轴上安装有限位引导器,限位引导器安装在固定板上;
3、地面上安装有电动推杆固定座,电动推杆固定座上设有rfid识别器及芯片,电动推杆固定座的一侧上设有信号接收器,rfid识别器及芯片与信号接收器相匹配。
4、优选的,所述支撑座上安装有多个定位块,定位块上安装有连接杆,连接杆上安装有固定块,固定块安装有圆形转环,圆形转环转动安装在安装座上。
5、优选的,所述电动推杆固定座的一侧上安装有电动推杆,电动推杆上转动安装有固位块,固位块安装在固定板上。
6、优选的,所述安装座上开设有限位槽,圆形转环转动安装在限位槽内。
7、本实用新型的有益效果是:
8、本实用新型,通过低能耗、低成本实现了轨道低速轻型车辆的自动道岔,在游乐设施、试验(实验)中有广阔的市场前景,结构简单、精密度容易控制,车辆从岔道进入主道实现了零能耗自动入轨,车辆从主道进入岔道,小型限位引导器只需要厘米级的旋转或升降,能耗极低。
技术特征:1.一种低速轻型轨道车的低能耗岔道自动控制装置,包括轨道本体(1),所述轨道本体(1)上设有车辆(2),其特征在于:所述车辆(2)上安装有安装座(9),安装座(9)上安装有伺服电机(14),伺服电机(14)上安装有支撑座(19),支撑座(19)上安装有电动伸缩杆(18),电动伸缩杆(18)上安装有传动轴(13),传动轴(13)上安装有限位引导器(8),限位引导器(8)安装在固定板(3)上;
2.根据权利要求1所述的一种低速轻型轨道车的低能耗岔道自动控制装置,其特征在于:所述支撑座(19)上安装有多个定位块(17),定位块(17)上安装有连接杆(16),连接杆(16)上安装有固定块(15),固定块(15)安装有圆形转环(10),圆形转环(10)转动安装在安装座(9)上。
3.根据权利要求1所述的一种低速轻型轨道车的低能耗岔道自动控制装置,其特征在于:所述电动推杆固定座(5)的一侧上安装有电动推杆(4),电动推杆(4)上转动安装有固位块(11),固位块(11)安装在固定板(3)上。
4.根据权利要求2所述的一种低速轻型轨道车的低能耗岔道自动控制装置,其特征在于:所述安装座(9)上开设有限位槽(12),圆形转环(10)转动安装在限位槽(12)内。
技术总结本技术公开了一种低速轻型轨道车的低能耗岔道自动控制装置,涉及到自动控制装置技术领域,包括轨道,本技术,通过低能耗、低成本实现了轨道低速轻型车辆的自动道岔,在游乐设施、试验(实验)中有广阔的市场前景,结构简单、精密度容易控制,车辆从岔道进入主道实现了零能耗自动入轨,车辆从主道进入岔道,小型限位引导器只需要厘米级的旋转或升降,能耗极低,RFID识别器识别到某辆车完成任务要进入岔道的时候,芯片通知车轮限位引导器电机工作,限位引导器升起或旋转到进入岔道所要求的坐标位置,车轮在限位引导器的帮助下完成转向,进入岔道。需要进入岔道的车辆通过后,限位引导器下降或旋转离开,后面未完成任务的车辆正常运行。技术研发人员:蒋智敏,陈明霞,罗先芳,刘丽英受保护的技术使用者:广东元也绿道技术有限公司技术研发日:20230717技术公布日:2024/2/19本文地址:https://www.jishuxx.com/zhuanli/20240718/232447.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表