一种不停车不减速轨道列车下上客专车与智能高速道岔的制作方法
- 国知局
- 2024-08-01 08:53:41
背景技术:
1、英国设计师提出:让城市电车与高铁一并行驶,并保持相同速度,等到电车和高铁的门对接到一起时,让乘客从两辆车的对接门处实现换乘。
2、土耳其设计师提出:将高铁车厢进行模块化设计,当快到站时,载着乘客的列车就会赶来,与前方车厢对接,等到乘客交替完毕,车厢进行脱离。
3、中国设计师提出:在站台的铁轨上方添加一个吊舱,让乘客提前进入,等高铁进站时,直接把它放到运行的高铁顶部,以此实现不停站换乘。
4、随着高铁临近,站点的吊舱会逐渐加速,达到与列车相同的速度,并固定在列车顶部,而先前的吊舱则会逐渐减速,让出位置给新的吊舱,自己停靠在站点轨道上,从而让乘客下车。
5、目前到站不停车措施实施的难点和缺陷。
6、上述几种高铁换乘的方法虽然都没有让高铁进行减速,但都要求达到高铁的运行速度,也就是起码要达到250公里每小时以上的速度,但这个却是最大的难点。就算是高铁加速要达到这个速度,也要进行40公里的加速才能完成,因此换乘轨道的扩建起码要在40公里以上。
7、而根据我国站点间隔也就在120公里左右来计算,那么换乘轨道的建设总长度将达到我国(全球)高铁总长度的三分之一,是一个极其庞大的过程。
8、而根据我国交通部发布的高铁数据,我国高铁总长度在3.79万公里左右,而每公里高铁造价为1.5亿元,也就是说停站不停车措施想要落地,起码需要1.89万亿元的投入。
9、而除了庞大的投入之外,我们还需要考虑特殊情况。那就是如果一个站点下车的旅客过多,一个换乘仓根本装不下怎么办,或者说如果换乘过程中发生了意外,那么在高铁高速运行的环境下,该怎样保护乘客不受伤害.
10、因此不停站高铁是个很好的想法,但实施起来太难,目前现有的几种方案还难以投产。
11、例如申请号为201710829348.5的发明专利提出了一种通过换乘车厢与主列车的脱离与连接达到换乘目的的换乘系统。虽然其利用传感器可以实现换乘车厢与主列车间的离车脱钩、来车同速、来车对接。但是由于换乘车厢在主列车尾端,换乘乘客在车内来回走动距离过大,易影响车内秩序造成不必要混乱。又如申请号为201810355948.7的发明专利,利用门架及多个位置的电磁铁完成在悬吊系统上的摆渡车与顶部可开闭的过渡车厢间进行得分别装有上下乘客的摆渡车厢的交换工作,在此之前利用电磁铁将摆渡车与高铁达到同速,该发明存在不能满足大流量客流换乘需求的缺点。
12、由于铁路道岔具有构造复杂、使用寿命短、限制列车速度、行车安全性低、养护维修投入大等特点,与曲线、接头并称为轨道的三大薄弱环节。虽然现有活动心道岔能提高一些通过速度(250km/h),但未解决根本问题,未能达到(350km/h)真正的无缝道岔-跨区间无缝线路,且成本高昂难以普及。目前道岔的缺陷是制约不停车不减速轨道列车实施与发展的关键因素。
13、本发明的目的在于提供一种轨道列车(高铁)进站不停车不减速下上客的关键技术,克服现有技术的缺陷,做到轨道列车(高铁350km/h)进站不停车不减速下上客,通过本发明对铁路道岔的设计,既安全简便又经济实惠,可大幅度节约旅客旅途时间,可大幅度降低建造成本,可大幅度节约轨道交通运营成本,可大幅度节约能源,可大幅度减少碳排放对环境友好,还可大幅度缩减轨道列车(包括高铁)车站规模。
技术实现思路
1、本发明是通过以下技术方案实现的:
2、一种不停车不减速轨道列车下上客专车与智能高速道岔,其特征在于包括以下步骤:
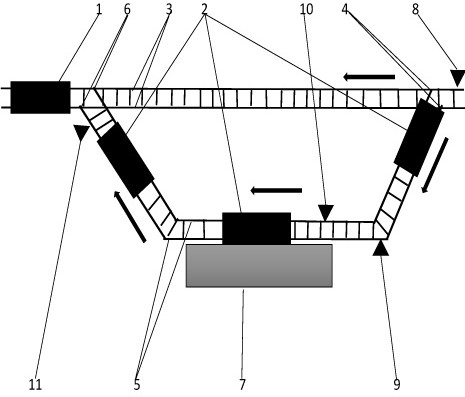
3、行驶列车1行驶到下上客专车2-轨道脱离雷达/激光识别点8,下上客专车2脱离不停站不减速的行驶列车1,下上客专车2减速经智能高速道岔4进入分侧道5驶入车站雷达/激光识别点9准备停车,滑行至雷达/激光识别点10进入站台7停车,下客再上客,排队等待下一趟行驶列车1牵引,同时,在车站乘客上车后等待的前一辆下上客专车2,启动行驶至雷达/激光识别点11(这个加速点与行驶列车1闪过点时差≦5秒)加速通过智能高速道岔6驶入主轨道3追赶本次行驶列车1—下上客专车2高速(时速100-400km)追赶行驶列车1,3-10分钟赶上前方行驶列车1(时速60-350km)对接并由行驶列车1牵引,下上客专车2内的乘客进入前方行驶列车1,同时下一站要下车的乘客进入下上客专车2准备下车,下上客专车2距离下一站停车雷达/激光识别点10尚有5-20公里处设置有轨道雷达/激光识别点8,当行驶列车1拉着下上客专车2行驶至轨道雷达/激光识别点8,下上客专车2自动与行驶列车1脱离,下上客专车2由行驶列车1的驾驶员驾驶/自动驾驶/智能驾驶/无人驾驶减速驶入车站下上客站台7,下客上客,如此循环,永无止境。
4、所述的下上客专车2由驾驶仓+旅客车箱(也可用现有旅客列车车箱改造,一端增设驾驶仓)、气动自动对接与脱离装置/电磁自动对接与脱离装置构成,具有在线电力和自备脱线动力,当在线电力出现故障时,立即切换启动自备脱线动力,并具有在线或离线可操作性:加速、减速、启动、停止,其驾驶操作可由行驶列车1的驾驶员远程无线操作进行,也可完全由自动驾驶/智能驾驶/无人驾驶进行,也可由行驶列车1的驾驶员与自动驾驶/智能驾驶/无人驾驶相结合进行。
5、所述的驾驶仓其特征:由人驾驶/自动驾驶/智能驾驶/无人驾驶操作系统、雷达/激光雷达定位识别系统、摄像头、传感器、gps卫星定位系统/轨道交通卫星定位系统、车轨云无线通信系统和计算机及其操作系统构成。
6、所述的智能高速道岔4,由自动/智能精准制导装置12、液压/电动传动装置动力总成18、上下滑动左刀轨13、上下滑动右刀轨14、上下滑动轨道15(根据车轮轮缘适宜通过要求,上下滑动左刀轨13、上下滑动右刀轨14、上下滑动轨道15的上下动程优选≧45毫米)、刀轨固定轨16、分侧道17、液压/电动/气动传动系统装置11(优选液压千斤顶式传动系统装置,其主要部分设置在智能高速道岔4地下钢筋混凝土构筑平台上的钢铁/尼龙塑胶盒内,且具有密闭防水结构)构成。
7、所述的智能高速道岔4,当行驶列车1经过轨道雷达/激光识别点8自动发出分离信号,上下滑动轨道15自动向下滑动到位锁定,上下滑动左轨道13和上下滑动右轨道14同时自动向上滑动到位锁定,分侧道5通畅,将脱离驶过来的下上客专车2通过智能高速道岔4分离到分侧道5驶入车站站台7,下上客专车2通过后,上下滑动左轨道13和上下滑动右轨道14同时自动向下滑动到位锁定,上下滑动轨道15自动向上滑动到位锁定,主轨道3通畅(主轨道常通)。
8、所述的智能高速道岔6与智能高速道岔4结构与功能相同,但方向不同,一个是进,一个是出。
9、所述的智能高速道岔4、6,其上下滑动左轨道13、上下滑动右轨道14和上下滑动轨道15其动作由自动/智能精准制导装置12、液压/电动传动装置动力总成18、液压/电动/气动传动装置系统终端11推动/牵引完成,又准又稳又快又省力。
10、所述的下上客专车2,一趟列车带一个下上客专车2(可拖挂多个车箱),从上一站带到下一站,环路循环,下上客专车2不会堆积。
11、所述的智能高速道岔4、6和下上客站台7与下上客专车2,根据车站客流量要求,可以设2-4个智能高速道岔4、6(1-2股道),配置1-2个下上客站台7,配置二个以上下上客专车2,也可以设多个智能高速道岔4、6(多股道)和多个下上客站台7,配置多个下上客专车2。
12、所述的智能精准制导装置12与车站中央控制中心、行驶列车1、下上客专车2通信,接受指令发出指令发生动作。
13、所述的行驶列车1,设置透明免打扰静音人行通道,通道两边设置推拉门,供乘客进出座位,通道的两边和上方绘制艺术画或广告图片,在座乘客不会受到过往乘客的打扰。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233889.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表