一种卫星观测空间目标时的期望姿态轨迹计算方法与流程
- 国知局
- 2024-08-01 05:25:21
本发明涉及卫星姿态控制,特别涉及一种卫星观测空间目标时的期望姿态轨迹计算方法。
背景技术:
1、在某些任务需求下,卫星利用所携带的相机、雷达等有效载荷对空间目标或区域进行凝视、跟踪及推扫,因此卫星平台应通过其自身的姿态调整以保证载荷特定轴对目标的精确指向,即为载荷提供工作时所需的姿态。当星上载荷是一类方形宽视场相机,且观测目标区域时存在视场约束,则单纯通过消除相旋的思路来计算光轴方向姿态并不一定能够满足观测过程中对视场的要求,因此需要根据对视场的具体约束来计算。
技术实现思路
1、本发明的目的是提供一种卫星观测空间目标时的期望姿态轨迹计算方法,适用于目标观测过程中对相机视场存在要求的情况,可以获知特定视场约束下的期望姿态。
2、为了实现以上目的,本发明是通过以下技术方案实现的:
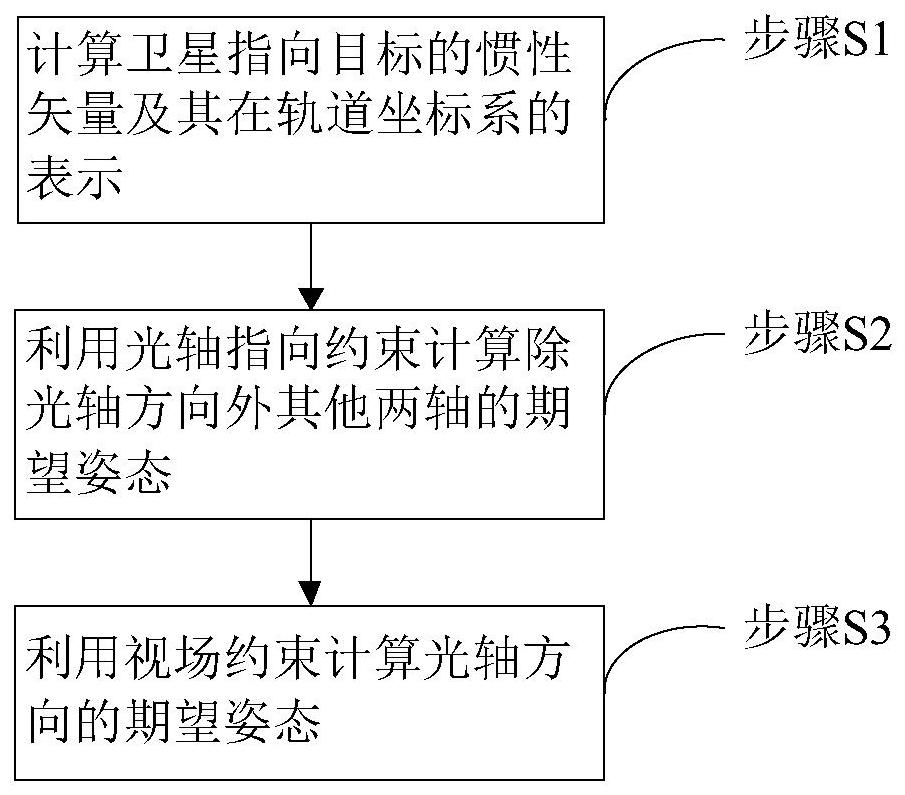
3、一种卫星观测空间目标时的期望姿态轨迹计算方法,其特点是,包括以下步骤:
4、步骤s1、计算卫星指向目标的惯性矢量及其在轨道坐标系的表示;
5、步骤s2、利用光轴指向约束计算除光轴方向外其他两轴的期望姿态;
6、步骤s3、利用视场约束计算光轴方向的期望姿态。
7、所述的步骤s1具体包括:
8、步骤s1.1、计算卫星在轨道系下的矢量坐标;
9、卫星指向地心的矢量rs在卫星轨道系中的表示为
10、
11、其中,右上角标‘o’表示矢量在轨道系下的描述,rs为轨道半径,通过下式计算:
12、
13、其中,a、e和f分别为卫星轨道的半长轴、偏心率和真近点角,考虑到偏心率较小,因此可认为轨道半径rs变化较小,则有轨道系下的速度和加速度矢量:
14、
15、步骤s1.2、计算目标在惯性系下的矢量坐标;
16、假设目标的矢量坐标rt已知,在惯性系下的表示记为rti,其中右上角标‘i’表示矢量在惯性系下的描述,相应的惯性系下的速度和加速度矢量记为和
17、步骤s1.3、计算卫星指向目标的惯性矢量及其在轨道坐标系的表示;
18、根据卫星的和目标的位置关系可得到卫星指向目标的矢量l在轨道系的表示:
19、
20、其中,aoi为从惯性系到轨道系的转换矩阵
21、
22、其中,u、i和ω分别为卫星轨道的纬度幅角、倾角和升交点赤经;
23、对lo求导得
24、
25、
26、其中,ωoi=[0 -|ω0| 0]t为轨道系相对于惯性系的角速度在轨道系的投影,ω0为轨道角速度,为ωoi的反对称矩阵
27、
28、卫星指向目标的矢量l在惯性系的表示为
29、
30、对时间求导有
31、
32、所述的步骤s2具体包括:
33、步骤s2.1、计算lo的单位矢量ρo及其一、二阶导数;
34、
35、
36、
37、步骤s2.2、计算滚动轴和偏航轴的姿态角、角速度和角加速度;
38、根据指向约束,成像过程中相机光轴应与目标矢量l平行,假设相机光轴指向本体+yb方向,则光轴在本体系的单位矢量为ρb=[0 1 0]t,右上角标‘b’表示矢量在本体系下的描述,采用欧拉角312转序描述卫星姿态,可得到ρb与的关系式
39、
40、其中,aob为312转序下本体系到轨道系的姿态转换矩阵,由abo的转置得到
41、
42、则可计算轨道系下描述的姿态滚动角和偏航角
43、
44、
45、上式对时间求导得相应的滚动和偏航欧拉角速度和角加速度:
46、
47、
48、
49、
50、根据运动学方程可得滚动和偏航方向相对于轨道系的角速度为:
51、
52、所述的步骤s3具体包括:
53、步骤s3.1、确定相机的视场约束;
54、光轴指向目标时还可绕自身旋转,因此需要其他约束条件来确定卫星的第三个姿态即俯仰姿态,为便于图像拼接,要求相机始终保持相对于赤道平面正立拍照,即要保证相机视场的水平中轴线平行于赤道平面,因此相机的视场约束可以理解为滚动轴oxb应平行于惯性系xioiyi平面,也就是惯性姿态俯仰角θbi=0,进而可得俯仰角速度和角加速度
55、步骤s3.2、计算li的单位矢量ρi及其一、二阶导数;
56、
57、
58、
59、其中,
60、步骤s3.3、计算相对于惯性系的滚动轴和偏航轴姿态角、角速度和角加速度;
61、惯性姿态滚动角和偏航角ψbi为
62、
63、相应的惯性欧拉角速度和角加速度为:
64、
65、
66、
67、
68、再根据运动学系可得惯性角速度
69、
70、步骤s3.4、计算俯仰轴姿态;
71、利用惯性系姿态角和轨道系姿态角的关系,以及惯性系俯仰角约束θbi=0,确定轨道系俯仰角θ,有
72、abi(aoi)t=abo
73、其中,abi是惯性系到本体系的转换矩阵,其采用惯性姿态角表示,计算abi(aoi)t并与abo对照可得
74、
75、其中,
76、aoi,31=-cosucosω+sinucosisinω
77、aoi,32=-cosusinω-sinucosicosω
78、aoi,33=-sinusini
79、由俯仰方向惯性角速度可得俯仰方向相对于轨道系的角速度
80、
81、进而根据运动学关系有
82、
83、求导得
84、
85、其中,
86、本发明与现有技术相比,具有以下优点:
87、本发明适用于目标观测过程中对相机视场存在要求的情况,可以获知特定视场约束下的期望姿态。
技术特征:1.一种卫星观测空间目标时的期望姿态轨迹计算方法,其特征在于,包括以下步骤:
2.如权利要求1所述的卫星观测空间目标时的期望姿态轨迹计算方法,其特征在于,所述的步骤s1具体包括:
3.如权利要求1所述的卫星观测空间目标时的期望姿态轨迹计算方法,其特征在于,所述的步骤s2具体包括:
4.如权利要求1所述的卫星观测空间目标时的期望姿态轨迹计算方法,其特征在于,所述的步骤s3具体包括:
技术总结本发明公开了一种卫星观测空间目标时的期望姿态轨迹计算方法,包括以下步骤:步骤S1、计算卫星指向目标的惯性矢量及其在轨道坐标系的表示;步骤S2、利用光轴指向约束计算除光轴方向外其他两轴的期望姿态;步骤S3、利用视场约束计算光轴方向的期望姿态。本发明适用于目标观测过程中对相机视场存在要求的情况,可以获知特定视场约束下的期望姿态。技术研发人员:张超,裴甲瑞,石晓涵,郭思岩,杨智颖,林扬皓,张增安,钟金凤受保护的技术使用者:上海航天控制技术研究所技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219657.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表