一种无人机航测的稳定吊舱的制作方法
- 国知局
- 2024-08-01 05:38:51
本技术涉及无人机吊舱,具体涉及一种无人机航测的稳定吊舱。
背景技术:
1、无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,在民用的航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等等领域的应用十分普遍,无人机航测是传统航空测量手段的补充,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势。
2、但无人机航测均需要搭载吊舱,其用于拓展无人机的测量精度,通常安装于无人机下侧。然而吊舱作为外置安装件,但无人机的降落支架高度低于吊舱时,吊舱会先与地面接触,导致舱内的电子部件受到冲击,长期使用会降低吊舱使用寿命。
技术实现思路
1、本实用新型的目的是提供一种无人机航测的稳定吊舱,以解决现有技术中的上述不足之处。
2、为了实现上述目的,本实用新型提供如下技术方案:
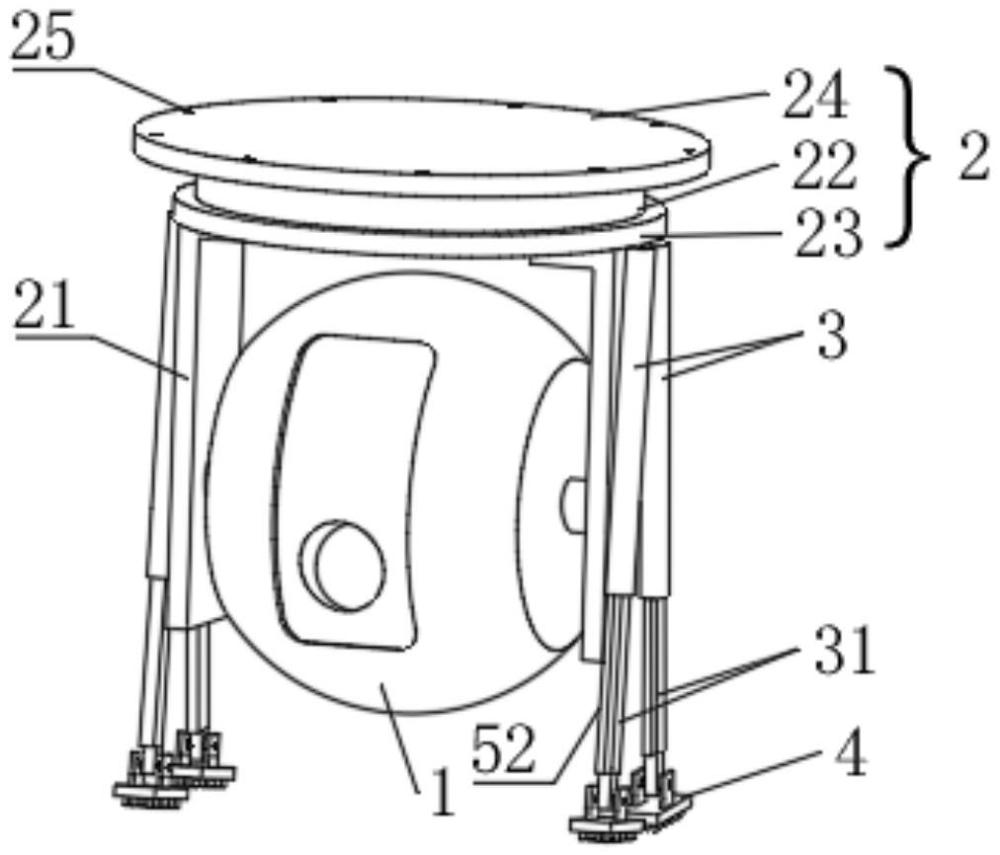
3、一种无人机航测的稳定吊舱,包括吊舱,还包括固定连接于吊舱两侧的吊板,所述吊板固定连接于安装台上;还包括支撑机构,所述支撑机构包括四个支撑臂,所述支撑臂固定连接于吊板上,所述支撑臂内滑动连接有立杆,所述立杆下侧开设有通孔,所述通孔内插接有圆柱销,所述圆柱销上转动连接有降落板;还包括减震机构,其用于对无人机着陆的减震。
4、进一步地,所述降落板下部设有多个圆柱体。
5、进一步地,所述减震机构包括弹簧,所述弹簧设于立杆与支撑臂之间,所述立杆上还设有限位机构。
6、进一步地,所述限位机构包括固定连接于立杆上的限位杆,所述限位杆端部固定连接有限位板,所述支撑臂内开设有与限位板相对应的限位槽。
7、进一步地,还包括扭簧,所述扭簧两端分别固定连接于立杆上和降落板上。
8、进一步地,所述安装台包括电动旋转机,所述电动旋转机下部设有下挡板,所述下挡板与吊板固定连接,所述电动旋转机上部设有上挡板。
9、进一步地,所述上挡板上开设有多个螺孔,所述安装台通过螺钉与无人机连接。
10、进一步地,所述支撑臂内开设有滑动槽,所述立杆的两侧固定设有与滑动槽滑动连接的滑动块。
11、在上述技术方案中,本实用新型提供的一种无人机航测的稳定吊舱具备的有益效果:
12、通过设置的降落板,在无人机降落时,降落板先与地面接触,降落板的转动设计使无人机具备复杂地形下的着陆能力,通过四个支撑臂及立杆,增强无人机降落后的稳定性,防止吊舱直接与地面产生碰撞,避免降落冲击导致吊舱内零部件的损坏,延长其使用寿命。
13、应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用于限制本公开。
14、本申请文件提供本公开中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
技术特征:1.一种无人机航测的稳定吊舱,包括吊舱(1),其特征在于:
2.根据权利要求1所述的一种无人机航测的稳定吊舱,其特征在于,所述降落板(4)下部设有多个圆柱体(41)。
3.根据权利要求1所述的一种无人机航测的稳定吊舱,其特征在于,所述减震机构包括弹簧(34),所述弹簧(34)设于立杆(31)与支撑臂(3)之间,所述立杆(31)上还设有限位机构。
4.根据权利要求3所述的一种无人机航测的稳定吊舱,其特征在于,所述限位机构包括固定连接于立杆(31)上的限位杆(35),所述限位杆(35)端部固定连接有限位板(36),所述支撑臂(3)内开设有与限位板(36)相对应的限位槽(37)。
5.根据权利要求1所述的一种无人机航测的稳定吊舱,其特征在于,还包括扭簧(42),所述扭簧(42)两端分别固定连接于立杆(31)上和降落板(4)上。
6.根据权利要求1所述的一种无人机航测的稳定吊舱,其特征在于,所述安装台(2)包括电动旋转机(22),所述电动旋转机(22)下部设有下挡板(23),所述下挡板(23)与吊板(21)固定连接,所述电动旋转机(22)上部设有上挡板(24)。
7.根据权利要求6所述的一种无人机航测的稳定吊舱,其特征在于,所述上挡板(24)上开设有多个螺孔(25),所述安装台(2)通过螺钉与无人机连接。
8.根据权利要求1所述的一种无人机航测的稳定吊舱,其特征在于,所述支撑臂(3)内开设有滑动槽(51),所述立杆(31)的两侧固定设有与滑动槽(51)滑动连接的滑动块(52)。
技术总结本技术涉及无人机吊舱技术领域,具体涉及一种无人机航测的稳定吊舱。一种无人机航测的稳定吊舱,包括吊舱,还包括固定连接于吊舱两侧的吊板,所述吊板固定连接于安装台上;还包括支撑机构,所述支撑机构包括四个支撑臂,所述支撑臂固定连接于吊板上,所述支撑臂内滑动连接有立杆,所述立杆下侧开设有通孔,所述通孔内插接有圆柱销,所述圆柱销上转动连接有降落板;还包括减震机构,其用于对无人机着陆的减震。通过设置的降落板,在无人机降落时,降落板先与地面接触,降落板的转动设计使无人机具备复杂地形下的着陆能力,通过四个支撑臂及立杆,增强无人机降落后的稳定性,防止吊舱直接与地面产生碰撞,避免降落冲击导致内部零部件的损坏。技术研发人员:刘元奎,李琪受保护的技术使用者:浙江建友工程咨询有限公司技术研发日:20231025技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/220822.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表