一种双轴太阳帆板驱动机构对日定向控制方法与流程
- 国知局
- 2024-08-01 05:41:56
本发明涉及航空控制,具体涉卫星帆板自主对日定向控制。
背景技术:
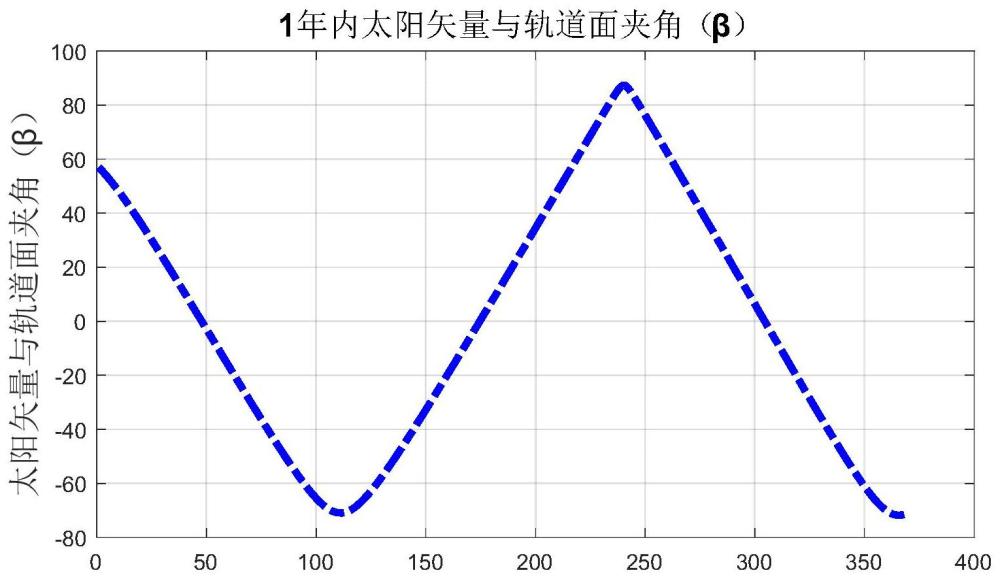
1、为保证星上能源,卫星利用铺设有电池片的帆板获取太阳能。目前帆板的安装形式主要有三种:固定翼帆板、单自由度帆板和双自由度帆板。固定翼帆板指帆板与星体固连,卫星除执行任务外在轨长期保持帆板对日状态,该类型帆板需要卫星在任务和任务结束时变换姿态,往往无法持续执行对地观测任务,因此限制了卫星功能和应用;单自由度帆板指可实现一维转动的帆板机构,通常用于太阳同步轨道,保证帆板在一维转动时太阳可直射帆板,从而保证卫星获取能源,该类型帆板受限于轨道特性;而双自由度帆板可适用于非太阳同步轨道,尽管此时太阳与轨道面的夹角变化范围较大,但在无需调整姿态的情况下通过二维转动,仍能保证太阳与帆板的夹角较小,从而确保星上能源。因此,相较于固定和单自由度,双自由度帆板有明显优势。
2、双自由度帆板通过转动保证帆板对日定向时,需要双轴(定义为帆板a轴、b轴)的不断调整。现有的常规控制策略中:a轴期望角速度较大,可长期处于匀速转动状态;而b轴期望转动角速度较小,此时不易控制,因此采用误差控制,当期望与实际相差一定角度时,控制b轴转动到期望值,目前策略中将太阳矢量实际位置作为期望值,该种方式易导致b轴启停次数较多,对机构可靠性要求严格。
技术实现思路
1、为了解决上述问题,本发明提供一种双轴太阳帆板驱动机构对日定向控制方法,所述双轴太阳帆板驱动机构对日定向控制方法具体为:
2、s1、计算轨道系下的太阳矢量与轨道系xooozo面的夹角angle_b,计算在轨道系xooozo面投影与轨道系-zo轴的夹角angle_a;
3、s2、采集双轴太阳帆板驱动机构中a轴的实际转动角度sada_a和双轴太阳帆板驱动机构中b轴的实际转动角度sada_b;
4、s3、定义双轴太阳帆板驱动机构a轴的阈值变limita和双轴太阳帆板驱动机构b轴的阈值变limitb;
5、s4、设置双轴太阳帆板驱动机构a轴的工作模式为a轴捕获、a轴跟踪和a轴保持;设置双轴太阳帆板驱动机构b轴的工作模式为b轴捕获和b轴保持;
6、s5、根据angle_a、sada_a和limita的数值关系确定双轴太阳帆板驱动机构a轴的工作模式;根据angle_b、sada_b和limitb的数值关系确定双轴太阳帆板驱动机构b轴的工作模式。
7、进一步,将所述双轴太阳帆板驱动机构安装在星体±y侧,+y侧双轴太阳帆板驱动机构的a轴与星体+y轴重合,b轴与星体+x轴重合;-y侧双轴太阳帆板驱动机构的a轴与星体-y轴重合,b轴与星体+x轴重合。
8、进一步,在步骤s1中,在轨道系yooozo的投影位于轨道系+y侧时angle_b角度为正,位于轨道系-y侧时angle_b角度为负;
9、在轨道系xooozo的投影位于轨道系+x侧时angle_a角度为正,位于轨道系-x侧时angle_a角度为负。
10、进一步,步骤s3中,limita为3°,limitb为5°。
11、进一步,步骤s4中:
12、a轴捕获时,a轴的转速为0.3°/s;
13、a轴跟踪时,若太阳位置超前于帆板,则+y侧a轴转速为0.0585°/s,-y侧a轴转速为-0.0585°/s;若太阳位置滞后于帆板,则+y侧a轴转速为0.0580°/s,则-y侧a轴转速为-0.0580°/s;
14、a轴保持时,a轴的转速为0°/s;
15、b轴捕获时,b轴的转速为1°/s;
16、b轴保持时,b轴的转速为0°/s。
17、根据权利要求4所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,步骤s4中,limita为3°,limitb为5°。
18、根据权利要求5所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,根据angle_a、sada_a和limita的数值关系确定双轴太阳帆板驱动机构a轴的工作模式具体为:
19、当|angle_a-sada_a|>limita时:a轴处于捕获模式;
20、当angle_a-sada_a<limita时:a轴处于跟踪模式;
21、当angle_a-sada_a<(0-limita)时:a轴处于跟踪模式;
22、当卫星处于非对地模式时:a轴处于保持模式。
23、进一步,根据angle_b、sada_b和limitb的数值关系确定双轴太阳帆板驱动机构b轴的工作模式具体为:
24、当angle_b-sada_b>limitb时:b轴处于捕获模式;
25、当angle_b-sada_b<(0-limitb)时:b轴处于捕获模式;
26、当|ex_b-sada_b|<0.5时:b轴处于保持模式,所述ex_b为b轴在+y侧和-y侧的期望角度。
27、本发明的有益效果为:
28、本发明结合双自由度帆板的控制策略:对b轴的控制进行优化,在太阳实际位置的基础上增加偏差控制量作为期望值,在不需要额外增加其他硬件设备的基础上,实现减少b轴转动频次的目的,延长机构在轨使用寿命,对双自由帆板控制策略在轨应用具有重大的工程意义。
29、本发明所设计的帆板控制方法,可有效减少双自由度帆板a、b轴的转动频次,该方法原理简单,易于实现,能够应用于工程实际中。
技术特征:1.一种双轴太阳帆板驱动机构对日定向控制方法,其特征在于,所述双轴太阳帆板驱动机构对日定向控制方法具体为:
2.根据权利要求1所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,将所述双轴太阳帆板驱动机构安装在星体±y侧,+y侧双轴太阳帆板驱动机构的a轴与星体+y轴重合,b轴与星体+x轴重合;-y侧双轴太阳帆板驱动机构的a轴与星体-y轴重合,b轴与星体+x轴重合。
3.根据权利要求2所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,在步骤s1中,在轨道系yooozo的投影位于轨道系+y侧时angle_b角度为正,位于轨道系-y侧时angle_b角度为负;
4.根据权利要求3所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,步骤s3中,limita为3°,limitb为5°。
5.根据权利要求4所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,步骤s4中:
6.根据权利要求5所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,步骤s4中,limita为3°,limitb为5°。
7.根据权利要求6所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,根据angle_a、sada_a和limita的数值关系确定双轴太阳帆板驱动机构a轴的工作模式具体为:
8.根据权利要求7所述的双轴太阳帆板驱动机构对日定向控制方法,其特征在于,根据angle_b、sada_b和limitb的数值关系确定双轴太阳帆板驱动机构b轴的工作模式具体为:
技术总结一种双轴太阳帆板驱动机构对日定向控制方法。所述方法具体为:S1、计算轨道系下的太阳矢量与轨道系X<subgt;o</subgt;O<subgt;o</subgt;Z<subgt;o</subgt;面的夹角Angle_B,计算在轨道系X<subgt;o</subgt;O<subgt;o</subgt;Z<subgt;o</subgt;面投影与轨道系‑Z<subgt;o</subgt;轴的夹角Angle_A;S2、采集双轴太阳帆板驱动机构中A轴的实际转动角度SADA_A和双轴太阳帆板驱动机构中B轴的实际转动角度SADA_B;S3、定义双轴太阳帆板驱动机构A轴的阈值变limitA和双轴太阳帆板驱动机构B轴的阈值变limitB;S4、设置双轴太阳帆板驱动机构A轴的工作模式为A轴捕获、A轴跟踪和A轴保持;设置双轴太阳帆板驱动机构B轴的工作模式为B轴捕获和B轴保持;S5、根据Angle_A、SADA_A和limitA的数值关系确定双轴太阳帆板驱动机构A轴的工作模式;根据Angle_B、SADA_B和limitB的数值关系确定双轴太阳帆板驱动机构B轴的工作模式。技术研发人员:龚泽宇,李小明,邢斯瑞,范林东,徐开,孙洪雨,霍占伟受保护的技术使用者:长光卫星技术股份有限公司技术研发日:技术公布日:2024/5/19本文地址:https://www.jishuxx.com/zhuanli/20240722/220990.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表