一种无人机机巢及无人机起降方法与流程
- 国知局
- 2024-08-01 06:03:50
本发明涉及无人机,尤其涉及一种无人机机巢及无人机起降方法。
背景技术:
1、在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域,无人机当前已得到广泛应用。
2、现有的无人机可参考申请号为cn2020104019430的专利,其包括无人机本体、起落架、机臂、电池、线圈、电机、螺旋桨,机臂设置在无人机本体的侧面,电机设置在机臂的端部,给螺旋桨提供动力源,起落架基本竖直安装在机臂的端部下侧,电池设置在无人机本体内,并可给电机供电,线圈和电池连接,电池通过无线充电的形式充电,无人机本体的下侧设置有可传输数据的数据接口。
3、对于无人机而言,其巡航时间和距离受限于电池能量,需降落到机巢中,通过机巢给无人机充电,另外,机巢还可以通过数据接口来传输无人机采集的数据。
4、现有的无人机型号较多,每种型号的无人机的起落架的尺寸不同,线圈和数据接口的位置不同;现有的机巢只能适配对应型号的无人机,无法适配不同型号的无人机。
技术实现思路
1、本发明为了解决现有的机巢无法给不同型号的无人机充电和传输数据的缺点,提出一种无人机机巢,可给不同型号的无人机充电和传输数据。
2、为实现上述目的,本发明采用如下技术方案:
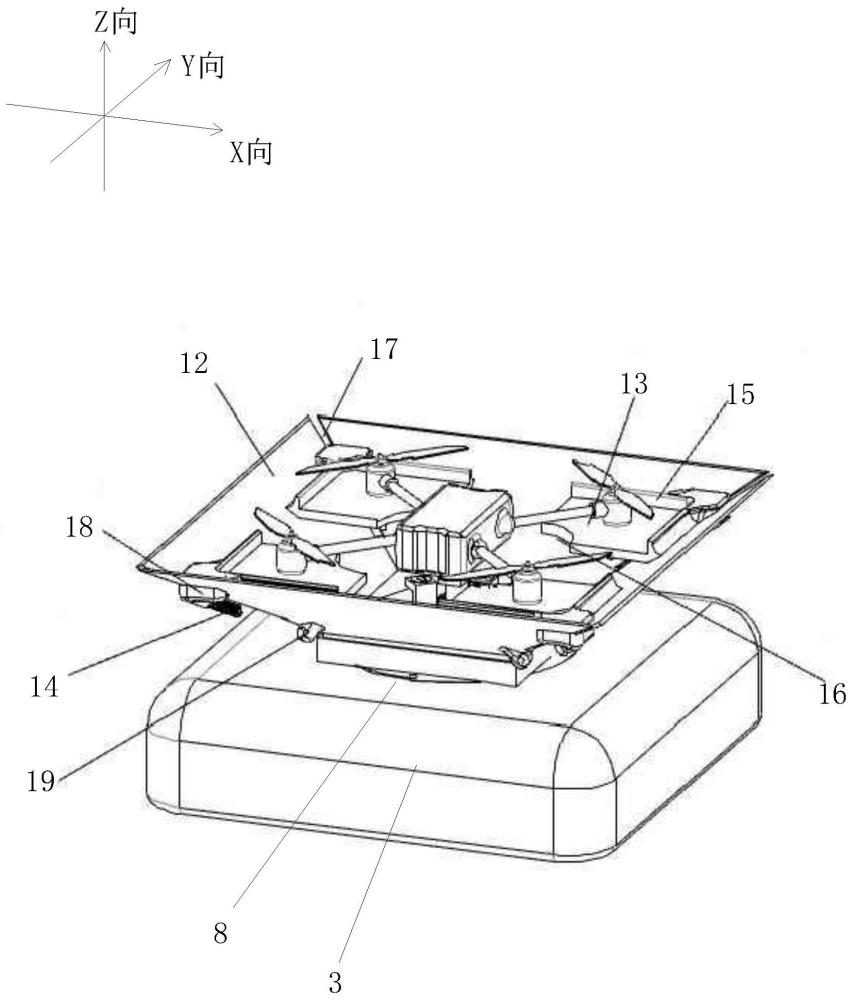
3、一种无人机机巢,包括:基座、起降台、第一电磁铁、摄像头、无线充电座、数据线插头、控制器、第二电磁铁以及机械臂;基座为中空结构,且基座的上侧设置有安装口;起降台设置在基座的上侧,并可支撑无人机的起落架,起降台上设置有避让口,避让口设置在安装口的上方;沿避让口的周向安装有若干第一电磁铁;摄像头吸附在其中一个第一电磁铁上;无线充电座可给无人机的电池无线充电,无线充电座吸附在其中一个第一电磁铁上;数据线插头可插入无人机的数据接口,数据线插头吸附在其中一个第一电磁铁上;第二电磁铁安装在机械臂上,机械臂的下端安装在基座内,机械臂穿过安装口和避让口,并可驱动第二电磁铁在x向、y向以及z向上运动;控制器安装在基座上,并可控制第一电磁铁、第二电磁铁、摄像头和机械臂的运行。
4、通过上述设置,机巢能给不同型号的无人机充电或者传输数据;不同型号的无人机降落到起降台上后,摄像头可拍摄无人机的充电位置和数据接口的位置,机械臂可将数据线插头插入数据接口,进行数据传输,机械臂可将无线充电座贴在无人机的充电位置,给无人机充电。
5、进一步的,起降台包括:侧板、支撑板和弹性件;侧板有四块,四块侧板绕安装口围成上大下小的四棱台结构;支撑板可支撑无人机的起落架,支撑板设置有四块,四块支撑板分别水平设置在四棱台结构内侧的四条棱线上,并可沿对应的棱线上下滑动,支撑板的上侧固定连接有限位板,支撑板靠近四棱台结构的轴线的一侧设置有可避让机械臂的缺口,无人机降落在支撑板上时,支撑板支撑无人机的起落架,支撑板向下滑动,限位板夹紧在无人机的起落架;弹性件与支撑板连接,弹性件可驱动支撑板沿棱线向上滑动。
6、通过上述设置,第一,侧板起到导向的作用,当支撑板上下运动时,支撑板打开或者合拢,支撑板合拢时,限位板将无人机的起落架夹紧,防止无人机在支撑板上滑动;第二,无人机将要起飞时,弹性件复原,支撑板向上运动可帮助无人机起飞。
7、进一步的,相邻的两个侧板之间存在空隙以形成沿四棱台结构的棱线延伸的滑槽;起降台还包括:滑块和固定块;滑槽中均滑动连接有滑块,支撑板与滑块固定连接;固定块固定连接在滑槽的下端,弹性件设置为弹簧,弹簧的下端连接在固定块上,弹簧的上端与滑块连接。
8、通过上述设置,支撑板通过滑块和滑槽与四棱台结构的棱线滑动连接。
9、进一步的,起降台还包括底板,底板呈方形,四块侧板分别固定连接在底板的四条边上,避让口设置在底板上;机巢还包括转动机构,转动机构设置在基座上,底板安装在转动机构的上侧,转动机构可驱动四棱台结构的轴线转动。
10、通过上述设置,转动机构可根据无人机的起落架的角度转动起降台,使限位板的位置和起落架的位置适配。
11、进一步的,转动机构包括:固定座、转动座和驱动机;固定座呈环形并安装在基座内;转动座呈环形并同轴转动连接在固定座中,底板安装在转动座的上侧,机械臂穿过转动座;驱动机安装在固定座上并可驱动转动座转动。
12、进一步的,机械臂包括:x向轨道、第一滑动座、第一驱动机构、y向轨道、第二滑动座、第二驱动机构、z向轨道、第三滑动座和第三驱动机构;x向轨道沿x向安装在基座内;第一滑动座滑动连接在x向轨道上;第一驱动机构安装在x向轨道上并可驱动第一滑动座沿x向轨道运动;y向轨道沿y向安装在第一滑动座上;第二滑动座滑动连接在y向轨道上;第二驱动机构安装在y向轨道上并可驱动第二滑动座沿y向轨道运动;z向轨道沿z向安装在y向轨道的上侧,z向轨道穿过安装口和避让口;第三滑动座滑动连接在z向轨道上,第二电磁铁安装在第三滑动座上;第三驱动机构安装在z向轨道上并可驱动第三滑动座沿z向轨道运动。
13、通过上述设置,第一驱动机构驱动第一滑动座沿x向轨道运动时,第一滑动座通过y向轨道、第二滑动座、z向轨道和第三滑动座驱动第二电磁铁沿x向运动;同理,第二驱动机构驱动第二滑动座沿y向轨道运动时,第二电磁铁沿y向运动,第三驱动机构驱动第三滑动座沿z向轨道运动时,第二电磁铁沿z向运动。
14、进一步的,第一驱动机构包括转动连接在x向轨道两端的第一带轮、设置在第一带轮之间的第一皮带、可驱动第一带轮转动的第一电机,第一滑动座与第一皮带连接;第二驱动机构包括转动连接在y向轨道两端的第二带轮、设置在第二带轮之间的第二皮带、可驱动第二带轮转动的第二电机,第二滑动座与第二皮带连接;第三驱动机构包括平行转动连接在z向轨道一侧的丝杆、可驱动丝杆转动的第三电机,丝杆与第三滑动座螺纹连接。
15、通过上述设置,第一电机驱动第一带轮转动时,第一带轮通过第一皮带驱动第一滑动座沿x向轨道运动;当第二电机驱动第二带轮转动时,第二带轮通过第二皮带驱动第二滑动座沿y向轨道运动;第三电机驱动丝杆转动时,丝杆和第三滑动座相对转动,第三滑动座沿z向轨道运动。
16、进一步的,第二电磁铁的侧面水平固定连接有稳定板,稳定板远离第二电磁铁的一侧设置有定位槽,定位槽贯穿稳定板上下两侧,摄像头、数据线插头和无线充电座的下端均固定连接有与定位槽适配的定位凸起。
17、通过上述设置,可增加第二电磁铁吸附的稳定性。
18、一种无人机起降方法,具体步骤为:步骤a,第二电磁铁吸附摄像头,无人机飞行到机巢的上方,摄像头拍摄无人机;步骤b,转动机构转动起降台,使限位板的位置与起落架的位置适配;步骤c,无人机降落到支撑板上后,支撑板向下运动并合拢,限位板将无人机的起落架夹紧;步骤d,当机巢需要传输数据时,摄像头拍摄无人机的数据接口的位置,机械臂驱动摄像头运动至第一电磁铁,第一电磁铁吸附摄像头,第二电磁铁松开摄像头,机械臂驱动第二电磁铁运动至数据线插头,第二电磁铁吸附数据线插头,第一电磁铁松开数据线插头,机械臂驱动数据线插头并将数据线插头插入数据接口中;当机巢需要充电时,摄像头拍摄无人机充电位置,机械臂驱动摄像头运动至第一电磁铁,第一电磁铁吸附摄像头,第二电磁铁松开摄像头,机械臂驱动第二电磁铁运动至无线充电座,第二电磁铁吸附无线充电座,第一电磁铁松开无线充电座,机械臂驱动无线充电座并将无线充电座贴在无人机上,给无人机无线充电;步骤e,无人机起飞时,弹性件复位支撑板,限位板松开无人机的起落架。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222673.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表