一种机臂可分离合并的旋翼无人机
- 国知局
- 2024-08-01 06:16:50
本发明涉及机器人,具体涉及一种机臂可分离合并的旋翼无人机。
背景技术:
1、对普通无人机而言,无人机结构呈刚性,不可分离变形,在与其他机器人组装配合时会加入刚性约束,导致其他机器人运动受限,影响其他机器人的性能并且使机器人特点不能很好的发挥。
2、经过广泛调研发现,目前无人机的可变形结构主要有两种,一种是利用柔性材料组装成机架使本身可变形,但是这种结构不能在飞行过程中保持很好的形状,增加控制难度;另一种是加入定向可变形的结构,实现在固定方向上可以变形,这种结构无法满足张拉整体外壳要求的机架可自由变形的需求。
3、因此,亟需设计一种旋翼无人机,使无人机能够在飞行时有高负载的结构强度,并且在需要变形时做到完全分离自由可动,还需要合并时具有比较大的余量使合并简单。
技术实现思路
1、本发明提供了一种机臂可分离合并的旋翼无人机,该无人机可自由分离合并,并且能够提供较强的负载能力,克服了现有无人机不能自由分离变形的不足。
2、本发明采用以下具体技术方案:
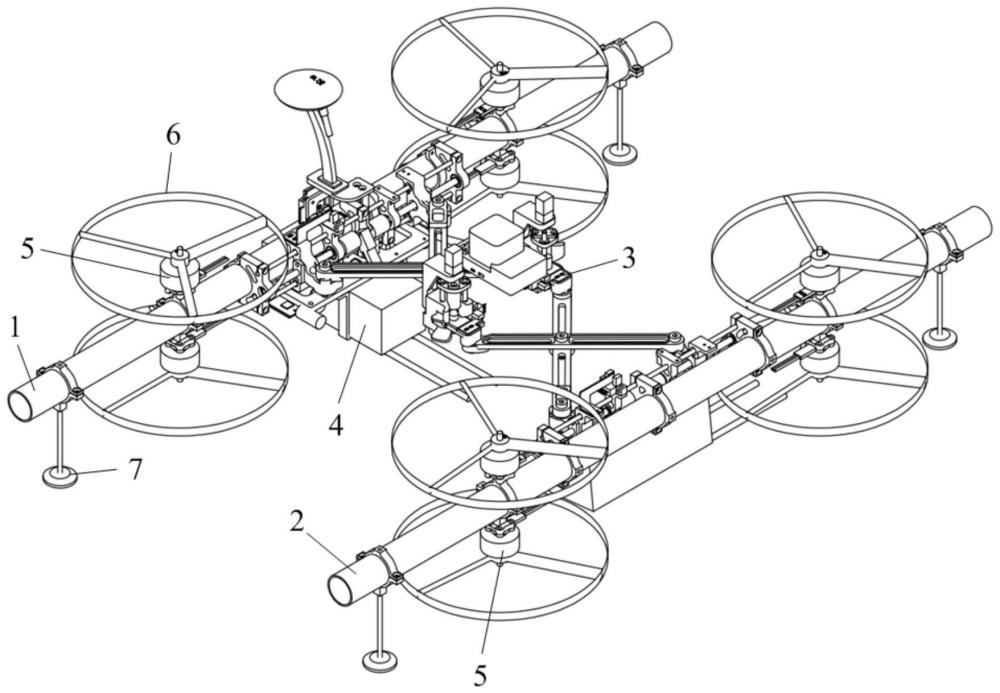
3、一种机臂可分离合并的旋翼无人机,该旋翼无人机包括第一刚性压杆、第二刚性压杆、可分离合并式机构、电池、旋翼电机、螺旋桨、电调以及飞控系统;
4、所述第一刚性压杆与所述第二刚性压杆并排设置,并通过所述可分离合并式机构可分离地连接在一起;
5、在所述第一刚性压杆和所述第二刚性压杆上对称安装有所述旋翼电机和所述电池;所述旋翼电机通过所述电调与所述电池电连接,用于驱动所述螺旋桨旋转;
6、所述飞控系统与所述可分离合并式机构和所述电调信号连接。
7、更进一步地,所述可分离合并式机构包括第一驱动机构、第二驱动机构、第一对接机构、第二对接机构以及锁止机构;
8、所述第一驱动机构固定安装于所述第一刚性压杆的中部,用于驱动所述第一对接机构沿所述第一刚性压杆和所述第二刚性压杆的排列方向运动;
9、所述第二驱动机构与所述第一驱动机构相对地固定安装于所述第二刚性压杆,用于驱动所述第二对接机构沿所述第一刚性压杆和所述第二刚性压杆的排列方向运动;
10、所述锁止机构用于将所述第一对接机构和所述第二对接机构锁定连接在一起;
11、所述第一驱动机构、所述第二驱动机构以及所述锁止机构均与所述飞控系统信号连接。
12、更进一步地,所述第一对接机构和所述第二对接机构均为由第一连杆和第二连杆交叉连接形成的x形机构;
13、所述第一对接机构的第一连杆和第二连杆的一端均与所述第一驱动机构铰接,另一端与所述锁止机构连接;
14、所述第二对接机构的第一连杆和第二连杆的一端均与所述第二驱动机构铰接,另一端与所述锁止机构连接。
15、更进一步地,所述第一驱动机构包括直流电机、两个丝杆、两个导轨以及两个转接块;
16、所述直流电机固定安装于所述第一刚性压杆,并与所述飞控系统信号连接;
17、两个所述丝杆对称连接于所述直流电机的两侧;所述丝杆与所述第一刚性压杆平行设置且转动支承于所述第一刚性压杆;在每个所述丝杆上均螺旋配合有一个所述转接块;
18、两个所述导轨对称分布于所述直流电机的两侧,并固定安装于所述第一刚性压杆且与所述第一刚性压杆平行设置;所述导轨与所述转接块滑动配合,用于对所述转接块的运动进行导向;
19、所述直流电机用于驱动所述丝杆旋转,使所述转接块沿所述丝杆的轴向运动;
20、所述第一连杆与所述直流电机一侧的所述转接块铰接;
21、所述第二连杆与所述直流电机另一侧的所述转接块铰接;
22、所述第二驱动机构与所述第一驱动机构结构相同。
23、更进一步地,所述锁止机构包括固定安装于所述第一对接机构的第一连杆和第二连杆的锁定支座、固定安装于所述锁定支座顶部的锁止电机、固定连接于所述锁止电机的锁定块、固定连接于所述第二对接机构的第一连杆和第二连杆的定位板、以及固定连接于所述定位板顶面的定位销;
24、所述锁定支座设置有开口朝向所述定位板且与所述定位板形状配合的插槽、以及用于容置所述定位销且与所述插槽连通的定位槽;
25、所述定位槽设置有朝向所述定位销敞开的喇叭口;
26、所述锁止电机用于驱动所述锁定块升降;所述锁定块的底面设置有与所述定位销形状配合的导向孔;
27、当所述锁止机构将所述第一对接机构与所述第二对接机构锁定连接在一起时,所述定位板插入所述插槽内,所述定位销容置于所述定位槽内,所述定位销的顶端插入所述导向孔内。
28、更进一步地,所述导向孔为锥形孔;
29、所述定位销的顶端设置有锥形凸起。
30、更进一步地,所述第一驱动机构还包括固定安装于所述第一刚性压杆的限位开关,所述限位开关用于在所述转接块达到极限位置时关闭所述直流电机。
31、更进一步地,在所述第一刚性压杆和所述第二刚性压杆上均对称安装有四个所述旋翼电机。
32、更进一步地,所述第一刚性压杆和所述第二刚性压杆均为碳纤维管。
33、更进一步地,还包括固定安装于所述第一刚性压杆和所述第二刚性压杆两端的脚架。
34、有益效果:
35、1、本发明的旋翼无人机采用并排设置的两个刚性压杆作为结构框架,在两个刚性压杆上对称安装有旋翼电机和电池,通过旋翼电机驱动螺旋桨旋转实现飞行,并通过可分离合并式机构能够实现两个刚性压杆之间的连接与分离,因此,上述旋翼无人机可以根据需求实现自由分离与合并,并且能够提供较强的负载能力,在保证无人机可变形的同时还能保证结构强度,克服了现有无人机结构不能自由分离变形的不足。
36、2、本发明的旋翼无人机在每个刚性压杆上装有4个旋翼电机,两两旋翼电机之间共轴旋转,提供更大升力,能够提供较强的负载能力,并且保证刚性压杆上结构的稳定。
技术特征:1.一种机臂可分离合并的旋翼无人机,其特征在于,包括第一刚性压杆、第二刚性压杆、可分离合并式机构、电池、旋翼电机、螺旋桨、电调以及飞控系统;
2.如权利要求1所述的旋翼无人机,其特征在于,所述可分离合并式机构包括第一驱动机构、第二驱动机构、第一对接机构、第二对接机构以及锁止机构;
3.如权利要求2所述的旋翼无人机,其特征在于,所述第一对接机构和所述第二对接机构均为由第一连杆和第二连杆交叉连接形成的x形机构;
4.如权利要求3所述的旋翼无人机,其特征在于,所述第一驱动机构包括直流电机、两个丝杆、两个导轨以及两个转接块;
5.如权利要求4所述的旋翼无人机,其特征在于,所述锁止机构包括固定安装于所述第一对接机构的第一连杆和第二连杆的锁定支座、固定安装于所述锁定支座顶部的锁止电机、固定连接于所述锁止电机的锁定块、固定连接于所述第二对接机构的第一连杆和第二连杆的定位板、以及固定连接于所述定位板顶面的定位销;
6.如权利要求5所述的旋翼无人机,其特征在于,所述导向孔为锥形孔;
7.如权利要求4所述的旋翼无人机,其特征在于,所述第一驱动机构还包括固定安装于所述第一刚性压杆的限位开关,所述限位开关用于在所述转接块达到极限位置时关闭所述直流电机。
8.如权利要求1所述的旋翼无人机,其特征在于,在所述第一刚性压杆和所述第二刚性压杆上均对称安装有四个所述旋翼电机。
9.如权利要求1所述的旋翼无人机,其特征在于,所述第一刚性压杆和所述第二刚性压杆均为碳纤维管。
10.如权利要求1-9任意一项所述的旋翼无人机,其特征在于,还包括固定安装于所述第一刚性压杆和所述第二刚性压杆两端的脚架。
技术总结本发明公开了一种机臂可分离合并的旋翼无人机,该无人机包括第一刚性压杆、第二刚性压杆、可分离合并式机构、电池、旋翼电机、螺旋桨、电调以及飞控系统;所述第一刚性压杆与所述第二刚性压杆并排设置,并通过所述可分离合并式机构可分离地连接在一起;在所述第一刚性压杆和所述第二刚性压杆上对称安装有所述旋翼电机和所述电池;所述旋翼电机通过所述电调与所述电池电连接,用于驱动所述螺旋桨旋转;所述飞控系统与所述可分离合并式机构和所述电调信号连接。上述无人机可自由分离合并,并且能够提供较强的负载能力,克服了现有无人机不能自由分离变形的不足。技术研发人员:杨庆凯,方浩,刘松源,郝思远,殷煜涵,吕京硕,陈杰受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/223113.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表