一种适用于扑翼机的双舵机控制正V形分离尾结构
- 国知局
- 2024-08-01 06:19:58
本发明涉及仿生扑翼飞行器结构领域。
背景技术:
1、仿生扑翼飞行器是一种模仿动物飞行的新型飞行器,具有灵活性强、机动性高等特点,适合进行军用侦查任务。而尾翼作为飞行器的重要组成部分,对于保持飞行器的稳定性和操控性起着至关重要的作用。固定翼飞行器中就有采用v型尾翼的案例,其综合了水平尾翼和垂直尾翼的功能,当v尾的两侧舵面向相同或不同方向偏转时,可以分别实现升降舵和方向舵的功能,这使得飞机在进行快速爬升、俯冲和转向等动作时更为灵活。
2、在中国发明专利申请cn104229138a中公开了一种分裂式差动尾翼操纵方式,该方式尾翼采用平尾方式,分为左右两段尾翼加尾舵进行差动操控实现偏航,操纵效率高、结构简单;但此类尾翼操纵方式使用传统的水平尾翼设计,缺少垂直安定面与方向舵、仅靠两尾舵实现滚转、偏航,在扑翼飞行器上可能无法有效应对由扑动翼产生的复杂气流,这种气流可能导致尾翼的控制效果降低,进而影响飞行器的稳定性和操控性。
3、在中国发明专利申请cn104260883a中也公开了一种分离式倒v尾翼操纵机构,分为左右两段倒v形支架与舵面,同为双舵机差动操纵,然而,倒v形尾翼具有良好的稳定性,但是在操纵性上略有不足,因而需要面积较大的舵面,以产生更大的舵面效率,提升其操纵性,但这也会进一步加重尾舵负担。
4、在中国发明专利申请cn112874760a中公开了采用扑翼驱动的复合式微型飞行器,采用扑翼作为动力源,包含固定翼升力面与正v形尾翼,其正v形左右尾翼相距较近,正如中国发明专利cn104260883a一文的背景技术所提及的,此类正v形尾翼左右舵面距离较近,不能提供足够的横向力矩。
5、因此,如何使得仿生扑翼飞行器能够在具有较好的稳定性、操纵性的同时,还能够提供足够的横向力矩,就成为了本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明针对以上问题,提出了一种适用于扑翼机的双舵机控制正v形分离尾结构,通过改善尾翼结构,提高扑翼飞行器的灵活性、敏捷度,从而提高飞行性能。
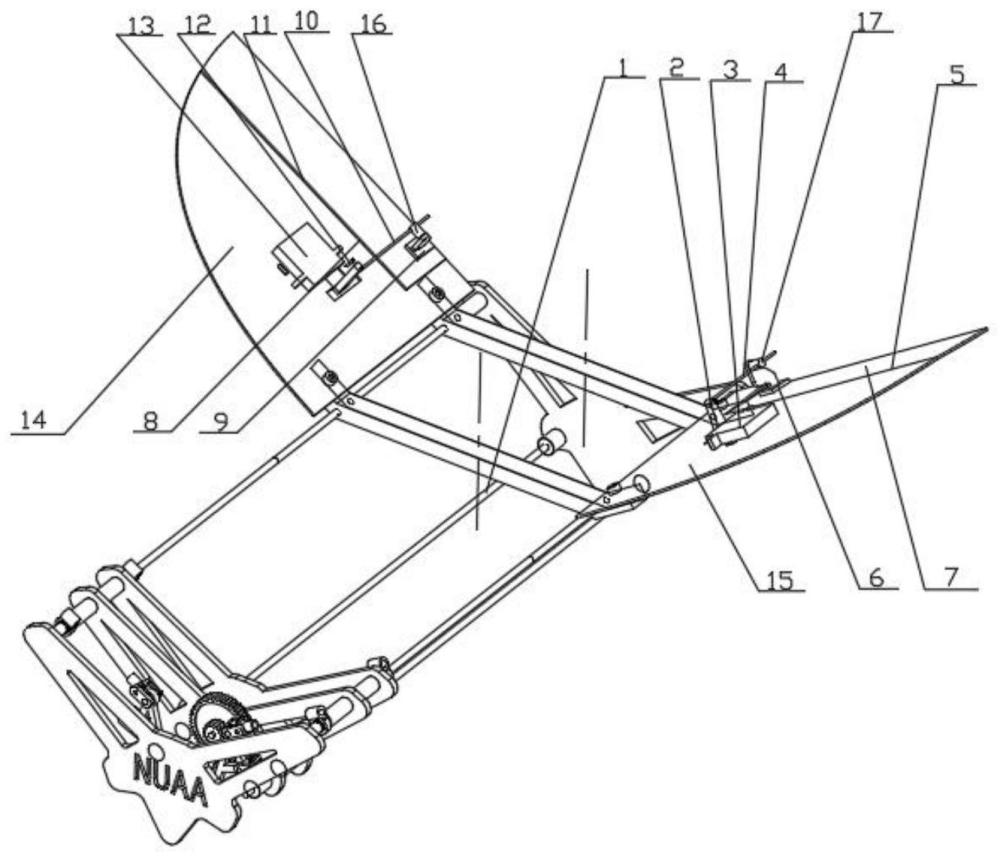
2、本发明的技术方案为:所述双舵机控制正v形分离尾结构包括机架体,固定安装在机架体尾部的一对尾翼,以及安装在尾翼后部的尾舵;
3、一对所述尾翼呈正v形布置,并且所述机架体上连接一对尾翼的两个连接点之间留有间距;所述尾舵转动连接在尾翼的后部,并且在二者之间设有尾舵驱动机构,通过尾舵驱动机构带动尾舵相对于尾翼做上下翻转运动。
4、一对所述尾翼沿机架体的中心对称布置,并且一对尾翼之间所呈的夹角小于120°。
5、作为优选,初始状态平放时,尾翼与水平面的夹角α等于30°,为了选取合适的v尾角度,需进行飞行测试、风洞测试或计算机模拟,以评估不同角度下飞行器的飞行性能和操控特性,从而选择最适合的角度。
6、值得注意的是,由于尾翼与水平面的夹角在飞行过程中是始终保持不变的,在制作阶段可以选择制作具有多个安装位置的尾翼安装架,并将其固定在机架体尾部,以使得尾翼安装在尾翼安装架后,呈不同的v形夹角。
7、本案中优选为30°,其优势在于,能够在纵向和横向稳定性之间找到一个较好的平衡点,其水平尾容量较大,垂直尾容量适中,既保证该角度有着充分的纵向稳定性,又可以使其横向稳定性在合理范围之内。该角度的v尾舵面可以提供充分的舵面效率,其能够提供扑翼飞行器低速状态下的足够的横向力矩与纵向力矩,可以提供较高的俯仰与滚转控制效率,进而使飞行器进行控制时能够得到良好的响应。
8、所述尾翼的翼长为l,所述尾翼通过沿机架体长度方向布置的两颗螺栓固定安装在机架体上,两颗螺栓轴心的间距为该间距设置在翼长l的1/2到2/3之间,优选为2/3。考虑到当两个固定安装点之间的距离小于l/2时,平面在固定点外侧悬空部分较大,易形成近似于悬臂梁的结构。在固定点之间的部分将受到弯矩作用,该部分可能在飞行中会受到较大的应力集中,尤其是在固定点附近。局部应力过大的情况可能引发裂纹或断裂。
9、当两个固定安装点间距大于2/3l时,由于固定安装点间距过大,可能会导致平面在受到垂直于平面的外力时发生较大的整体形变,如弯曲或扭转。
10、据此,本案特别提出将固定安装点间距大于l/2且小于2/3l,此时,弯矩的影响相对较小,且不会因固定距离过远而发生弯曲或扭转。
11、另外:
12、当v尾间距较小时,两个尾翼之间的气动干扰会增加,从而影响飞机的操纵性和稳定性,还有可能导致尾翼后方的涡流相互干扰,进而增加飞机的阻力。同时,间距较小会使得飞行器不能提供足够的横向力矩。
13、间距过大也可能影响稳定性,因为过长的间距可能导致尾翼在受到侧向风或其他扰动时产生过大的摆动。也可能使得尾翼的操纵面在受到扰动时产生过大的偏转,从而影响飞机的操纵响应。据此,本案还对v尾间距做出了如下特别限定:
14、所述机架体上连接一对尾翼的两个连接点之间的间距为v尾间距,v尾间距为2cosα×0.65l,α为尾翼与水平面夹角,l为一侧尾翼展长。
15、关于尾舵的驱动:
16、所述尾舵驱动机构包括尾舵机、尾舵机摇臂、拉杆、金属调节器以及尾舵角,所述尾舵机固定安装在尾翼上,所述尾舵机摇臂的一端固定安装在尾舵机的输出轴上,另一端则与拉杆铰接,所述拉杆的另一端固定安装在金属调节器中,所述金属调节器与固定安装在尾舵上的尾舵角铰接。
17、进一步的,所述尾翼的表面上还开设有用于容置尾舵机摇臂的摇臂容置孔,以及用于容置拉杆的拉杆容置孔。
18、进一步的,所述金属调节器呈圆柱状,所述拉杆沿径向贯穿所述金属调节器,并且通过螺栓锁止。
19、本发明由左右两个分离的尾翼组成正v形状,尾翼相对于水平面的夹角等于30°;两个舵机分别控制左右两个尾舵,其实现方法是,舵机连接舵机摇臂,舵机摇臂另一端连接拉杆,拉杆另一端连接尾翼舵面上的舵角,进而实现尾翼舵面的操控;当舵机工作时,通过拉杆使尾翼产生相应的动作,尾舵上下偏转角度范围为±40°以内,从而调整扑翼机的飞行姿态。
20、本发明的有益效果为:
21、一、相较于无控制或单舵机控制尾翼的方式来说,正v形尾翼的设计结合双舵机控制,使得扑翼机在飞行过程中能够更快速、更精确地响应操控指令。两个分离的尾翼可以独立控制,从而增加了操控的灵活性和精度。
22、二、相较于双舵机差动操纵水平尾翼的方式来说,正v形尾翼的布局有助于提供飞行稳定性,减少不必要的摇摆和偏移。同时,v形尾翼能以较少的部件总数来减小尾翼之间及尾翼与机身之间的干扰阻力,并具有尾翼加工量小的优点,减少了复杂性和重量,同时v形尾翼可以替代普通尾翼,起着纵向、横向静稳定的作用。
23、三、相较更具有稳定性的倒v形尾翼差动操纵方式来说,正v形尾翼操纵方式选择了增加飞机操纵性,更具有机动性与灵活性,更适用于高机动性,需要快速响应的突发场景。
24、四、相较于左右舵面较近或一体化的正v形尾翼,分散式正v形尾翼避免了左右舵面距离较近,不能提供足够的横向力矩的问题。具有更大的舵面效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223334.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表